Clear Sky Science · sv
Design, tillverkning och testning av en ny omnidirektionell mjuksleeve‑aktuator
Varför en mjuk robot‑sleeve spelar roll
Föreställ dig en framtid där en lätt, tygliknande ärm tyst hjälper någon att böja en stel armbåge, stabilisera en kirurgs hand eller styra en fabrikarbetares arm utan klumpiga metalldelar eller högljudda motorer. Denna artikel presenterar just en sådan enhet: en mjuk, luftdriven sleeve som kan sträckas, förkortas och böjas i alla riktningar runt en extremitet, vilket öppnar nya möjligheter för bekväma bärbara robotar och assistiva hjälpmedel.
Från styva maskiner till försiktiga hjälpare
Traditionella robotar förlitar sig på hårda metalldelar och elmotorer, vilka är kraftfulla men kan vara osäkra eller obekväma när de placeras direkt på människokroppen. Under det senaste decenniet har mjuk robotik gått en annan väg och använt flexibla material och lufttryck för att skapa rörelser som bättre efterliknar muskler och senor. Många mjuka aktuatorer rör sig dock bara i en eller två riktningar eller kräver höga lufttryck och komplexa konstruktioner, vilket gör dem svåra att bära. Författarna satte som mål att ta fram en kompakt, ärmformad aktuator som kan omsluta ett led, vara bekväm mot kroppen och ändå generera stark, precist kontrollerad rörelse i flera riktningar vid relativt lågt tryck.
En ny sleeve som rör sig som en snabel
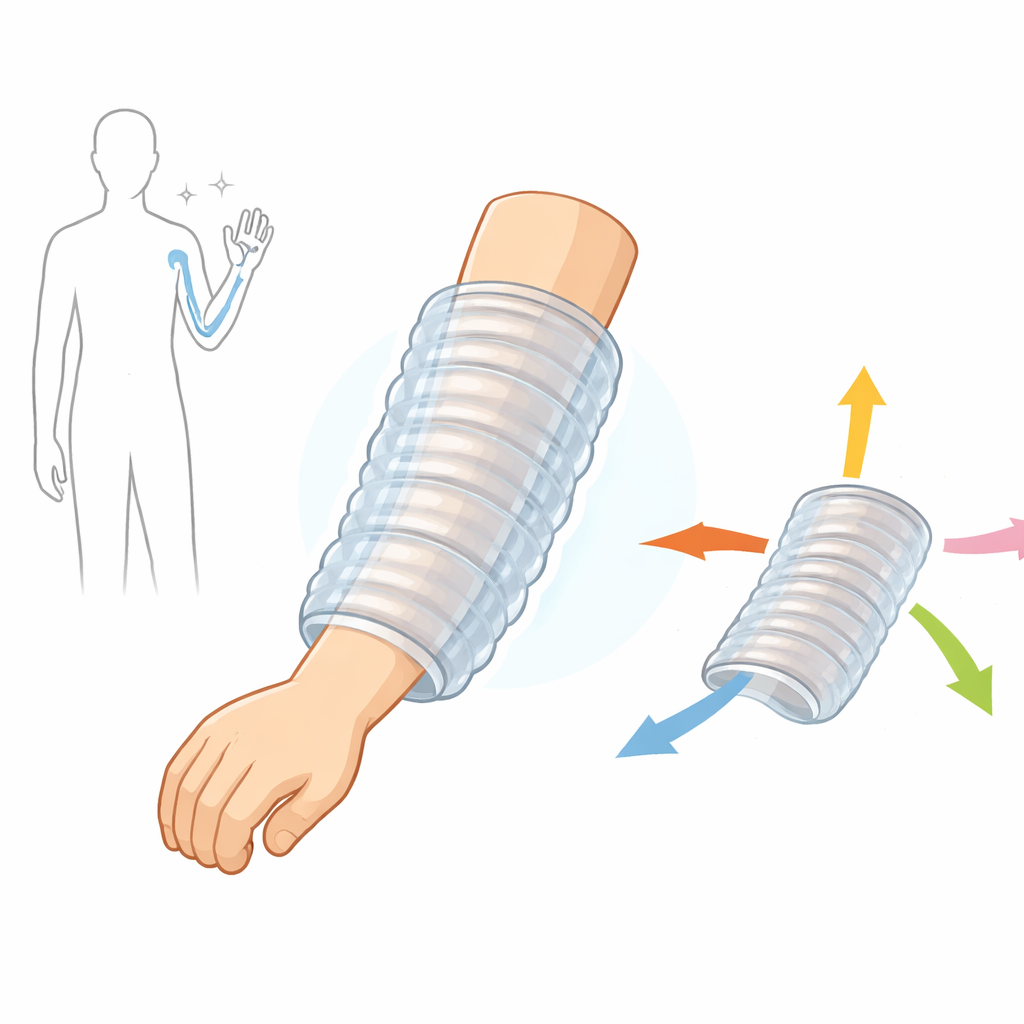
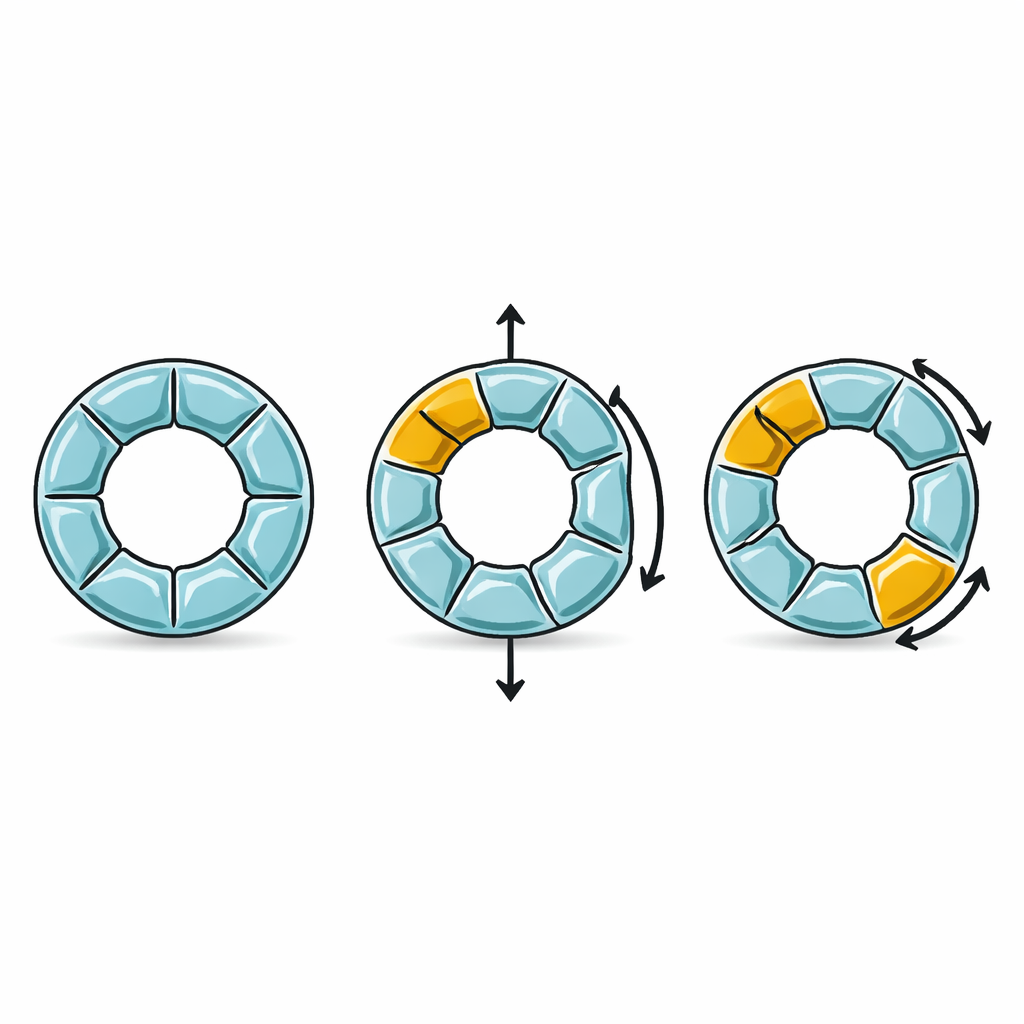
Enheten som presenteras här, kallad en omnidirektionell mjuk sleeve‑aktuator, är inspirerad av en elefants snabels rörlighet. Den ser ut som ett ihåligt, räfflat rör som kan träs över en extremitet eller ett robotleder. Inuti väggarna i detta rör finns fyra separata luftkammare ordnade runt omkretsen och formade som V‑liknande veck, påminnande om concertinabälgar. Genom att justera lufttrycket i varje kammare oberoende kan sleeven förlängas, aktivt förkortas under vakuum eller böjas åt valfri sida. Lika tryck i alla kammare gör att den förlängs; symmetrisk sänkning av trycket gör att den kontraherar; och att skapa en tryckskillnad mellan sidor gör att den kurvar mot den mjukare, lägretryckta sidan. Denna enda struktur ger alltså flera typer av rörelse utan styva ramar eller externa begränsningslager.
Hur noggrann design och 3D‑utskrift gör det möjligt
Att uppnå sådan mångsidig rörelse krävde noggrann justering av sleeve‑geometrin och materialen. Forskarna jämförde olika väggformer och stödsstrategier och fann att ett viktat bälg‑veck byggt av flexibelt termoplastiskt polyuretan, förstärkt med longitudinella »bind»‑lager, gav den bästa kombinationen av styrka och flexibilitet. De varierade systematiskt egenskaper som veckbredd, veckvinkel, väggtjocklek samt antalet och tjockleken på bindlagren. Bredare veck tillät till exempel större förlängningar, medan mindre veckvinklar förbättrade kraftgenereringen men ökade styvheten. De upptäckte också att användning av ett mjukare material dramatiskt förbättrade både böjräckvidd och slaglängd. För att pålitligt tillverka dessa intrikata former utvecklade teamet ett detaljerat 3D‑utskriftsrecept för flexibla plaster på Bowden‑typens skrivare och hanterade utmaningar som fuktkontroll, munstyckesstockning, borttagning av supports och printtemperatur. Denna process producerade gastäta väggar och reproducerbara delar lämpade för storskalig tillverkning.
Vad testerna avslöjar om rörelse och styrka
Med en specialbyggd testplattform med precisa sensorer och tryckregulatorer mätte författarna hur starkt och hur långt sleeven kunde trycka, dra och böja. Vid ett måttligt tryck på 130 kilopascal—lägre än många befintliga mjuka aktuatorer—genererade sleeven upp till 60 newton axiell kraft, tillräckligt för att meningsfullt assistera ledens rörelse, och förlängdes med cirka 81 millimeter samtidigt som den kunde kontrahera 25 millimeter under vakuum. Vid böjning nådde den vinklar upp till 45 grader och producerade 18 newton i böjkraft. Dessa resultat står sig väl jämfört med andra omnidirektionella mjuka aktuatorer, som ofta behöver mycket högre tryck för att uppnå mindre krafter och inte kan kontrahera aktivt. Teamet visade också att deras 3D‑utskriftsmetod ger i stort sett identiska aktuatorer från körning till körning, och att med återkopplingsstyrning kan sleeven följa målpositioner med sub‑millimeterprecision och reagera pålitligt vid låga till måttliga rörelsefrekvenser.
Vad detta betyder för framtida bärbara robotar
För en icke‑specialist är huvudpoängen att detta arbete omvandlar idén om en mjuk, omslutande »muskelsleeve» till en praktisk, testad teknik. Genom att kombinera en genomtänkt intern bälgdesign med en noggrant utvecklad 3D‑utskriftsprocess skapade forskarna en enda, lätt enhet som kan böjas i flera riktningar, förlängas och aktivt dra ihop sig, allt vid relativt lågt lufttryck. Eftersom den är ihålig och utformad för att omsluta en lem eller ett led är den särskilt lovande för bärbara robotexoskelett, medicinska stöd och rehabiliteringsverktyg som måste vara säkra, bekväma och kompakta. Framtida arbete kommer att förfina hur sleeven passar mot människokroppen, lägga in inbyggd sensning och smartare styrning, och kombinera den med vridande sleeves för att skapa ännu mer livlik, snabel‑liknande rörelse för vardaglig robotassistans.
Citering: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
Nyckelord: mjuk robotik, bärbara exoskelett, pneumatiska aktuatorer, 3D‑printad TPU, assistiva enheter