Clear Sky Science · de
Entwurf, Herstellung und Prüfung eines neuartigen omnidirektionalen, weichen Manschettenaktuators
Warum eine weiche robotische Manschette wichtig ist
Stellen Sie sich eine Zukunft vor, in der eine leichte, stoffähnliche Manschette leise dabei hilft, einen steifen Ellbogen zu beugen, die Hand eines Chirurgen zu stabilisieren oder den Arm eines Fabrikarbeiters zu führen — ganz ohne sperrige Metallrahmen oder laute Motoren. Dieses Paper stellt genau ein solches Gerät vor: eine weiche, luftbetriebene Manschette, die sich dehnen, verkürzen und in jede Richtung um eine Extremität biegen lässt und damit neue Möglichkeiten für komfortable, tragbare Roboter und Hilfsgeräte eröffnet.
Von starren Maschinen zu sanften Helfern
Traditionelle Roboter bauen auf harten Metallteilen und Elektromotoren auf, die zwar kraftvoll sind, aber gefährlich oder unbequem sein können, wenn sie direkt am Körper getragen werden. In den letzten zehn Jahren hat die weiche Robotik einen anderen Weg eingeschlagen und arbeitet mit flexiblen Materialien und Luftdruck, um Bewegungen zu erzeugen, die Muskeln und Sehnen besser nachahmen. Viele weiche Aktuatoren bewegen sich jedoch nur in einer oder zwei Richtungen oder benötigen hohe Luftdrücke und komplizierte Strukturen, was das Tragen erschwert. Die Autoren hatten das Ziel, einen kompakten, ärmchenförmigen Aktuator zu entwerfen, der ein Gelenk umschließen kann, am Körper bequem sitzt und dennoch starke, präzise steuerbare Bewegungen in vielen Richtungen bei vergleichsweise niedrigem Druck erzeugt.
Eine neue Manschette, die sich wie ein Rüssel bewegt
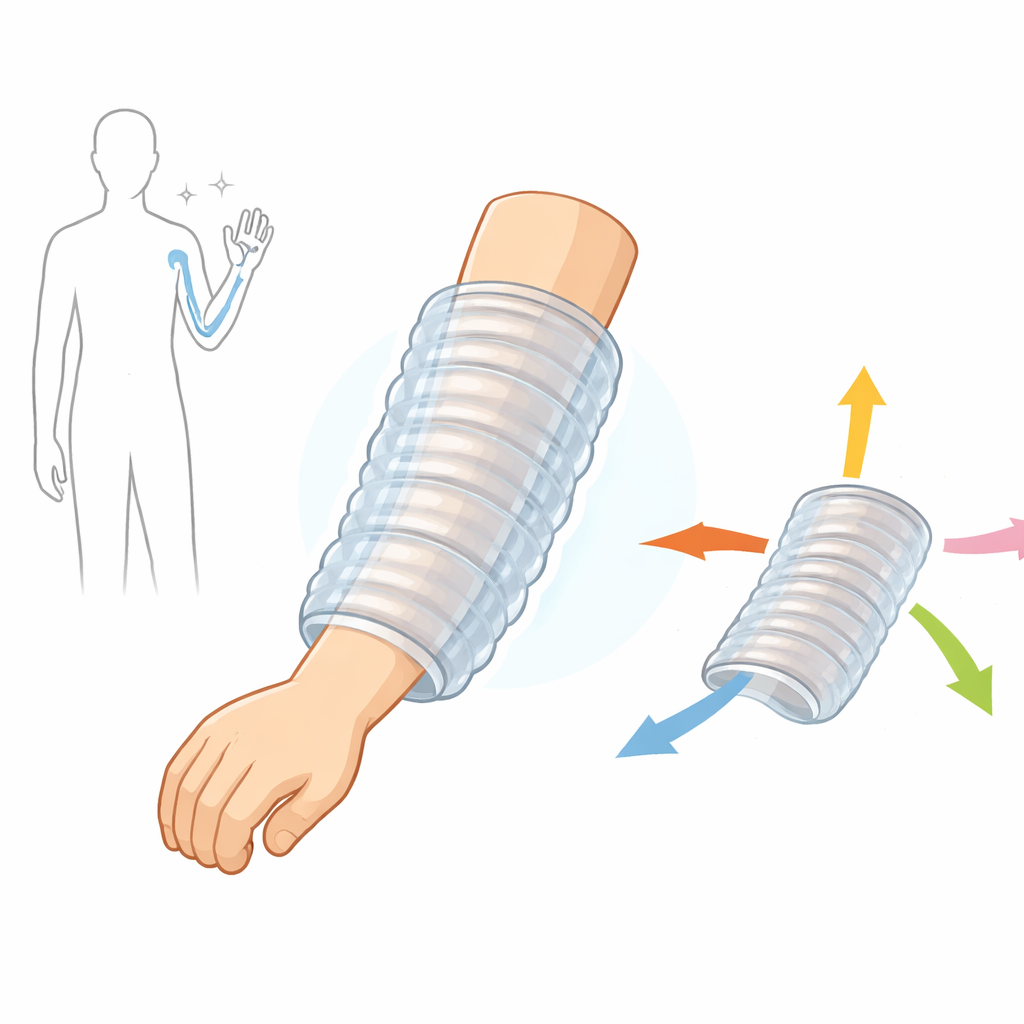
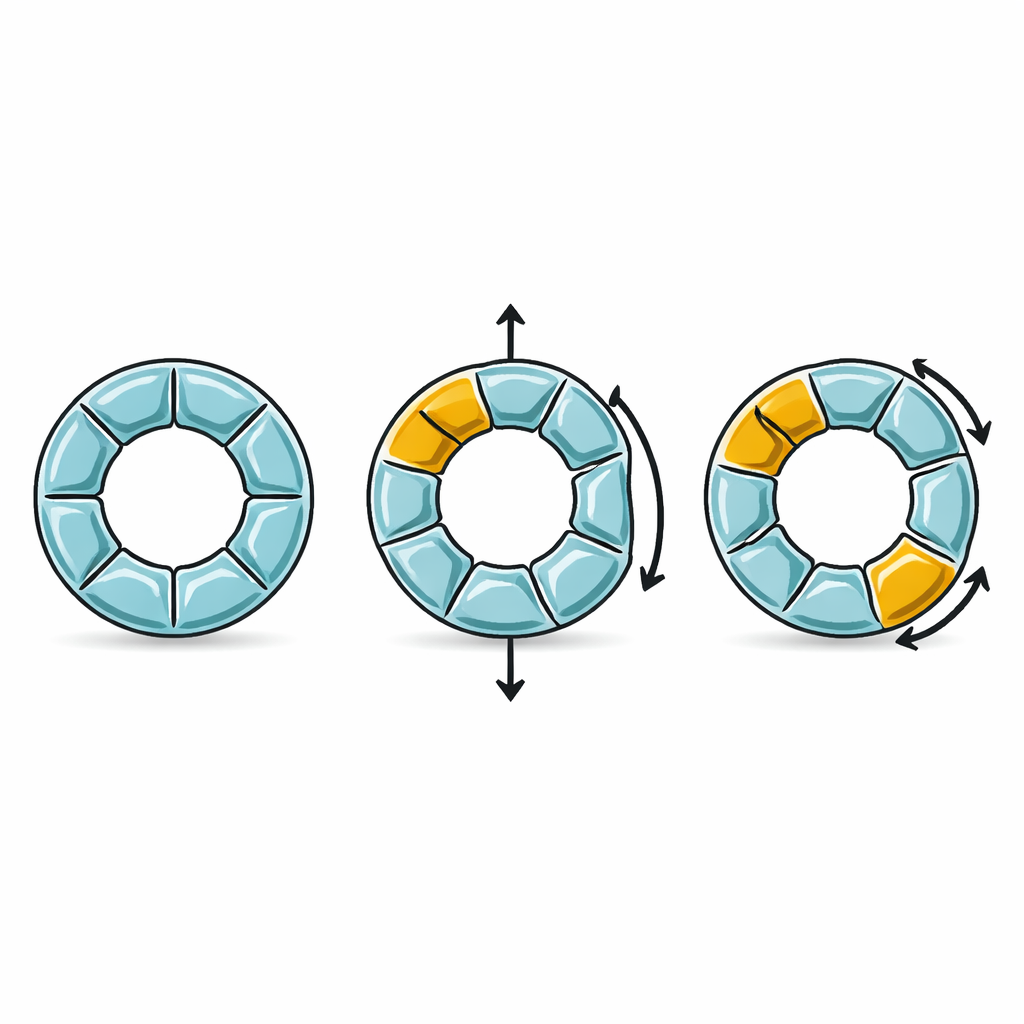
Das hier vorgestellte Gerät, ein omnidirektionaler weicher Manschettenaktuator, ist von der Beweglichkeit eines Elefantenrüssels inspiriert. Es ähnelt einem hohlen, gerippten Schlauch, der über eine Extremität oder ein Robotergelenk gezogen werden kann. In den Wänden dieses Schlauchs befinden sich vier separate Luftkammern, die um den Umfang angeordnet und in V-förmige Falten geformt sind, ähnlich wie bei Konzertina-Bälgen. Durch die unabhängige Regelung des Luftdrucks in jeder Kammer kann die Manschette verlängern, sich unter Vakuum aktiv verkürzen oder zu jeder Seite hin biegen. Gleichmäßiger Druck in allen Kammern lässt sie länger werden; symmetrisches Drucksenken lässt sie kontrahieren; ein Druckunterschied zwischen den Seiten lässt sie zur weicheren, niedrigdruckigen Seite hin krümmen. Diese einzelne Struktur bietet somit mehrere Bewegungsarten ganz ohne starre Rahmen oder äußere Zwangsschichten.
Wie sorgfältiges Design und 3D-Druck das ermöglichen
Um eine so vielseitige Bewegung zu erreichen, war eine präzise Abstimmung von Geometrie und Materialien nötig. Die Forschenden verglichen verschiedene Wandformen und Stützstrategien und stellten fest, dass ein gefalteter Balg aus flexiblem thermoplastischem Polyurethan, verstärkt durch längs verlaufende "Zug"-Schichten, die beste Kombination aus Festigkeit und Flexibilität bot. Sie variierten systematisch Merkmale wie Faltenbreite, Faltenwinkel, Wandstärke sowie Anzahl und Dicke der Zugschichten. Breitere Falten ermöglichten zum Beispiel größere Ausdehnungen, während kleinere Faltenwinkel die Kraftentwicklung verbesserten, aber die Steifigkeit erhöhten. Zudem zeigte sich, dass ein weicheres Material sowohl den Biegebereich als auch den Hub deutlich verbesserte. Um diese filigranen Formen zuverlässig herzustellen, entwickelte das Team ein detailliertes 3D-Druck-Rezept für flexiblen Kunststoff auf Bowden-Druckern und adressierte dabei Herausforderungen wie Feuchtigkeitskontrolle, Düsenverstopfungen, Entfernung von Stützen und Drucktemperatur. Dieser Prozess erzeugte luftdichte Wände und reproduzierbare Bauteile, die sich für die großmaßstäbliche Fertigung eignen.
Was die Tests über Bewegung und Kraft zeigen
Mithilfe einer kundenspezifischen Prüfplattform mit präzisen Sensoren und Druckreglern maßen die Autoren, wie stark und wie weit die Manschette drücken, ziehen und biegen kann. Bei einem moderaten Druck von 130 Kilopascal — niedriger als bei vielen bestehenden weichen Aktuatoren — erzeugte die Manschette bis zu 60 Newton axialer Kraft, genug, um Gelenkbewegungen spürbar zu unterstützen, und dehnte sich um etwa 81 Millimeter, während sie sich unter Vakuum um 25 Millimeter zusammenziehen konnte. Beim Biegen erreichte sie Winkel bis zu 45 Grad und erzeugte 18 Newton Biegekraft. Diese Ergebnisse schneiden im Vergleich zu anderen omnidirektionalen weichen Aktuatoren günstig ab, die oft deutlich höhere Drücke benötigen, um kleinere Kräfte zu erzielen, und keine aktive Kontraktion bieten. Das Team zeigte außerdem, dass ihre 3D-Druck-Methode nahezu identische Aktuatoren von Durchlauf zu Durchlauf liefert und dass die Manschette mit Feedback-Regelung Zielpositionen mit submillimetergenauer Genauigkeit verfolgen und bei niedrigen bis mittleren Bewegungsfrequenzen zuverlässig reagieren kann.
Was das für künftige tragbare Roboter bedeutet
Für Nicht‑Spezialisten lautet die wichtigste Erkenntnis: Diese Arbeit macht aus der Idee einer weichen, umschließenden "Muskelmanschette" eine praktikable, getestete Technologie. Durch die Kombination eines durchdachten internen Balgdesigns mit einem sorgfältig entwickelten 3D-Druckprozess schufen die Forschenden ein einzelnes, leichtes Gerät, das in mehrere Richtungen biegen, sich ausdehnen und aktiv zurückziehen kann — und das alles bei relativ niedrigem Luftdruck. Da es hohl ist und dazu gedacht, eine Extremität oder ein Gelenk zu umschließen, ist es besonders vielversprechend für tragbare robotische Exoskelette, medizinische Stützen und Rehabilitationstools, die sicher, komfortabel und kompakt sein müssen. Zukünftige Arbeiten werden die Anpassung der Manschette an den menschlichen Körper verfeinern, integrierte Sensorik und intelligentere Regelung hinzufügen und sie mit verdrehbaren Manschetten kombinieren, um noch lebensechtere, rüsselähnliche Bewegungen für den täglichen robotischen Assistenzgebrauch zu erzeugen.
Zitation: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
Schlüsselwörter: weiche Robotik, tragbare Exoskelette, pneumatische Aktuatoren, 3D-gedrucktes TPU, assistive Geräte