Clear Sky Science · fr
Conception, fabrication et tests d’un nouvel actionneur souple omnidirectionnel en forme de manche
Pourquoi une manche robotique souple est importante
Imaginez un futur où une manche légère, semblable à un tissu, aide discrètement une personne à plier un coude raide, stabiliser la main d’un chirurgien ou guider le bras d’un ouvrier d’usine sans cadres métalliques encombrants ni moteurs bruyants. Cet article présente justement un tel dispositif : une manche souple actionnée par air capable de s’allonger, de se raccourcir et de se courber dans toutes les directions autour d’un membre, ouvrant de nouvelles possibilités pour des robots portables et des dispositifs d’assistance confortables.
Des machines rigides aux assistants délicats
Les robots traditionnels reposent sur des pièces métalliques rigides et des moteurs électriques, puissants mais pouvant être dangereux ou inconfortables lorsqu’ils sont placés directement sur le corps humain. Au cours de la dernière décennie, la robotique souple a emprunté une voie différente, en utilisant des matériaux flexibles et la pression d’air pour créer des mouvements qui imitent mieux les muscles et les tendons. Beaucoup d’actionneurs souples, toutefois, ne se déplacent que dans une ou deux directions ou exigent de fortes pressions d’air et des structures complexes, ce qui les rend difficiles à porter. Les auteurs se sont donc donné pour objectif de concevoir un actionneur compact en forme de manche qui puisse entourer une articulation, rester confortable sur le corps et générer néanmoins des mouvements puissants et précisément contrôlés dans de nombreuses directions à des pressions relativement faibles.
Une nouvelle manche qui se déplace comme une trompe
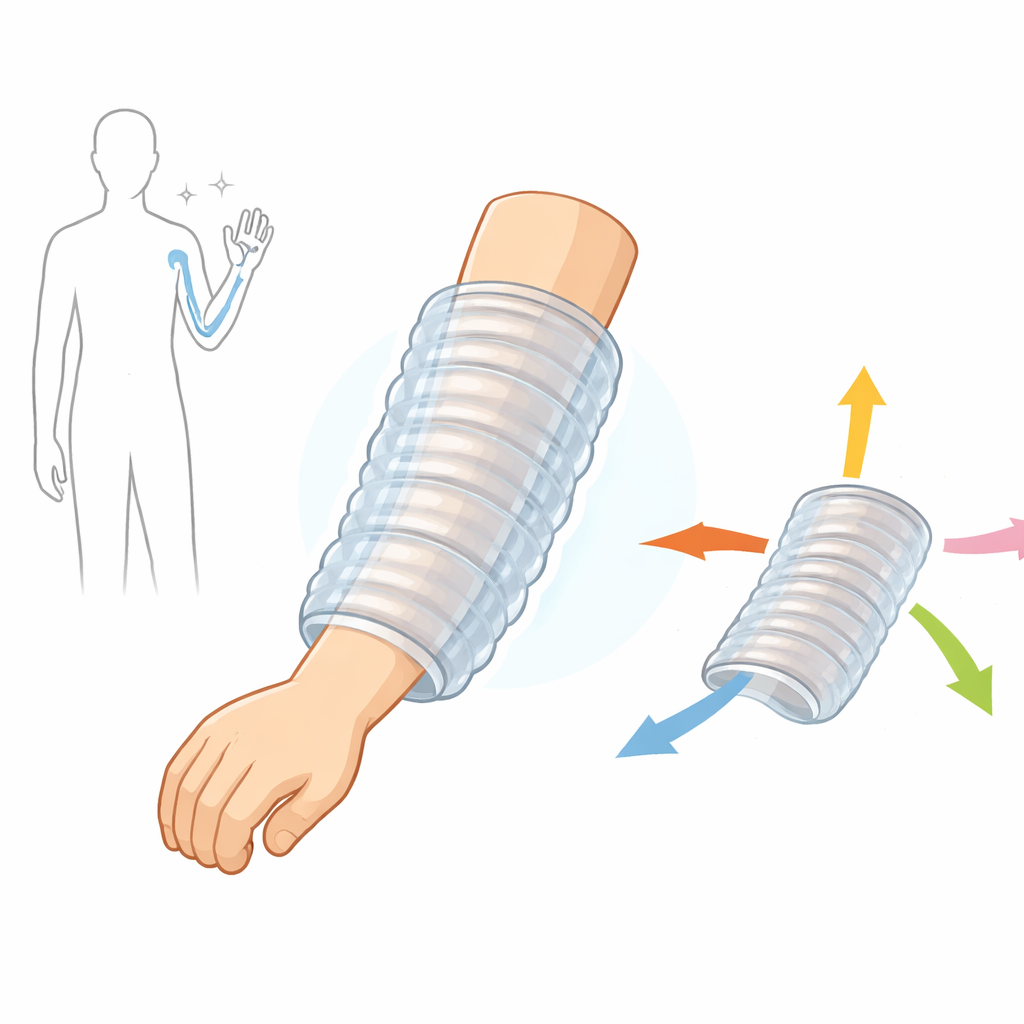
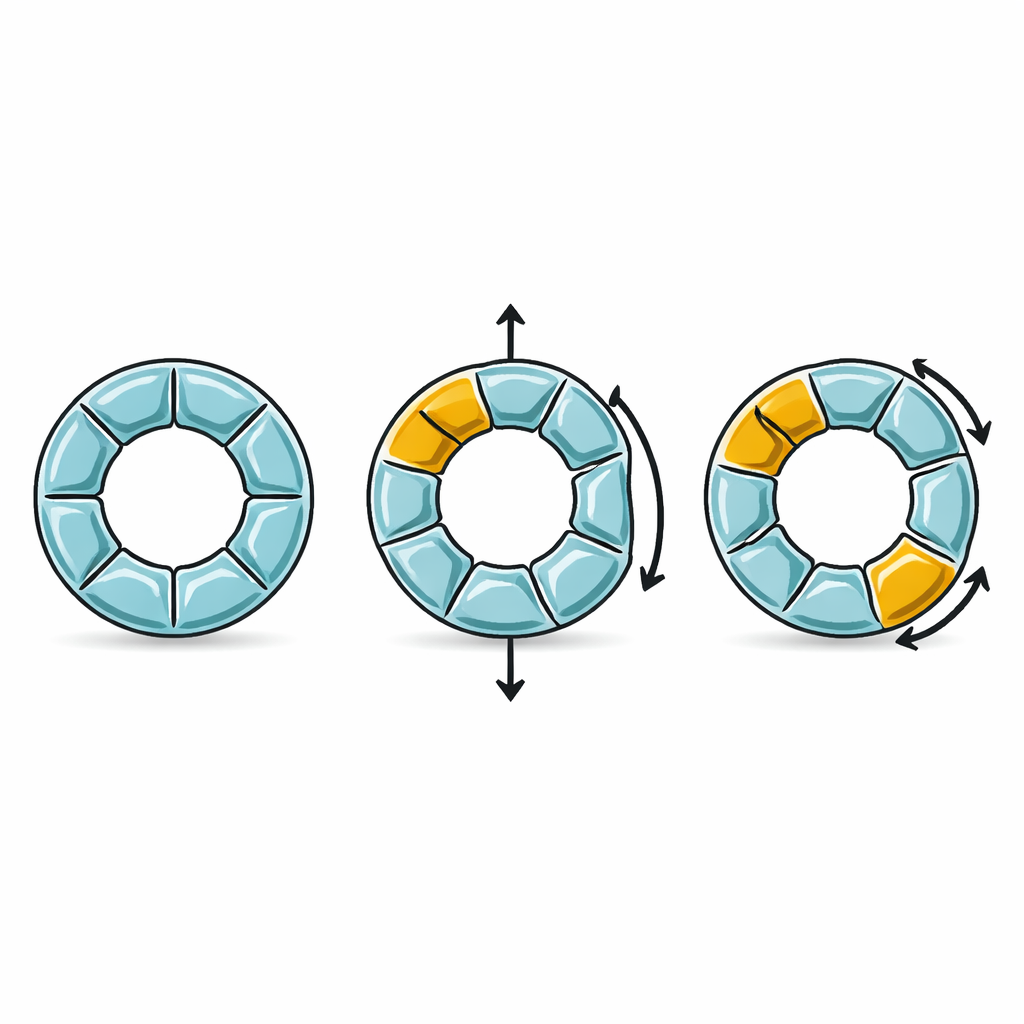
Le dispositif présenté ici, appelé actionneur souple omnidirectionnel en forme de manche, s’inspire de l’agilité de la trompe d’un éléphant. Il ressemble à un tube creux à nervures qui peut s’enfiler sur un membre ou une articulation robotique. Dans les parois de ce tube se trouvent quatre chambres d’air séparées disposées autour de la circonférence et formées en plis en V, semblables à des soufflets en accordéon. En ajustant la pression d’air dans chaque chambre indépendamment, la manche peut s’allonger, se raccourcir activement sous vide ou se courber vers n’importe quel côté. Une pression égale dans toutes les chambres la fait s’allonger ; abaisser la pression symétriquement la fait se contracter ; et créer une différence de pression entre les côtés la courbe vers le côté le plus souple, à pression plus faible. Cette seule structure fournit donc plusieurs types de mouvement sans cadres rigides ni couches de contrainte externes.
Comment une conception soignée et l’impression 3D la font fonctionner
Obtenir une telle mobilité polyvalente a nécessité un réglage fin de la géométrie et des matériaux de la manche. Les chercheurs ont comparé différentes formes de paroi et stratégies de renfort et ont constaté qu’un soufflet plié en polyuréthane thermoplastique flexible, renforcé par des couches longitudinales « d’attache », offrait la meilleure combinaison de résistance et de flexibilité. Ils ont fait varier systématiquement des caractéristiques telles que la largeur des plis, l’angle des plis, l’épaisseur des parois et le nombre et l’épaisseur des couches d’attache. Par exemple, des plis plus larges permettaient de plus grandes extensions, tandis que des angles de pli plus faibles amélioraient la génération de force mais augmentaient la rigidité. Ils ont également découvert que l’utilisation d’un matériau plus souple améliorait fortement l’amplitude de flexion et la course. Pour fabriquer de manière fiable ces formes complexes, l’équipe a développé une recette détaillée d’impression 3D pour plastique flexible sur des imprimantes de type Bowden, en traitant des défis tels que le contrôle d’humidité, le colmatage de buse, le retrait des supports et la température d’impression. Ce procédé a produit des parois étanches à l’air et des pièces reproductibles adaptées à la fabrication à grande échelle.
Ce que les tests révèlent sur le mouvement et la résistance
En utilisant une plateforme d’essai sur mesure avec des capteurs précis et des régulateurs de pression, les auteurs ont mesuré la force et l’amplitude avec lesquelles la manche pouvait pousser, tirer et se courber. À une pression modeste de 130 kilopascals — plus faible que celle de nombreux actionneurs souples existants — la manche a généré jusqu’à 60 newtons de force axiale, suffisante pour assister significativement le mouvement d’une articulation, et s’est allongée d’environ 81 millimètres tout en pouvant aussi se contracter de 25 millimètres sous vide. En flexion, elle a atteint des angles allant jusqu’à 45 degrés et produit 18 newtons de force de flexion. Ces résultats se comparent favorablement à d’autres actionneurs souples omnidirectionnels, qui nécessitent souvent des pressions bien plus élevées pour obtenir des forces plus faibles et ne peuvent pas se contracter activement. L’équipe a aussi montré que leur méthode d’impression 3D fournit des actionneurs pratiquement identiques d’une série à l’autre, et que, grâce à un contrôle en boucle, la manche peut suivre des positions cibles avec une précision sub‑millimétrique et répondre de manière fiable à des fréquences de mouvement faibles à modérées.
Ce que cela signifie pour les robots portables du futur
Pour un non-spécialiste, la conclusion essentielle est que ce travail transforme l’idée d’une « manche musculaire » souple et enveloppante en une technologie pratique et testée. En combinant un concept interne de soufflet astucieux avec un procédé d’impression 3D soigneusement élaboré, les chercheurs ont créé un dispositif unique et léger qui peut se courber dans plusieurs directions, s’allonger et se rétracter activement, le tout à des pressions d’air relativement faibles. Parce qu’il est creux et conçu pour entourer un membre ou une articulation, il est particulièrement prometteur pour les exosquelettes portables, les soutiens médicaux et les outils de rééducation qui doivent être sûrs, confortables et compacts. Les travaux futurs affineront l’ajustement de la manche au corps humain, ajouteront des capteurs intégrés et un contrôle plus intelligent, et le combineront avec des manches à torsion pour créer des mouvements encore plus naturels, de type trompe, pour une assistance robotique du quotidien.
Citation: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
Mots-clés: robotique souple, exosquelettes portables, actionneurs pneumatiques, TPU imprimé en 3D, dispositifs d’assistance