Clear Sky Science · it
Progettazione, fabbricazione e test di un nuovo attuatore morbido a manicotto omnidirezionale
Perché un manicotto robotico morbido è importante
Immaginate un futuro in cui un leggero manicotto simile a un tessuto assiste in silenzio una persona nell’andare a piegare un gomito rigido, stabilizzare la mano di un chirurgo o guidare il braccio di un operaio in fabbrica, senza telai metallici ingombranti o motori rumorosi. Questo articolo presenta proprio un dispositivo di questo tipo: un manicotto morbido alimentato ad aria che può allungarsi, accorciarsi e flettersi in qualsiasi direzione attorno a un arto, aprendo nuove possibilità per robot indossabili confortevoli e dispositivi assistivi.
Dalle macchine rigide ad aiutanti gentili
I robot tradizionali si basano su parti metalliche rigide e motori elettrici, che sono potenti ma possono risultare pericolosi o scomodi se posti direttamente sul corpo umano. Nell’ultimo decennio, la robotica morbida ha seguito una strada diversa, impiegando materiali flessibili e pressione d’aria per creare movimenti che assomigliano maggiormente a muscoli e tendini. Molti attuatori morbidi, tuttavia, si muovono solo in una o due direzioni o richiedono alte pressioni d’aria e strutture complesse, rendendoli difficili da indossare. Gli autori si sono quindi posti l’obiettivo di progettare un attuatore compatto a forma di manicotto che potesse circondare un'articolazione, risultare confortevole sul corpo e generare comunque un movimento forte e controllato con precisione in molte direzioni a pressioni relativamente basse.
Un nuovo manicotto che si muove come una proboscide
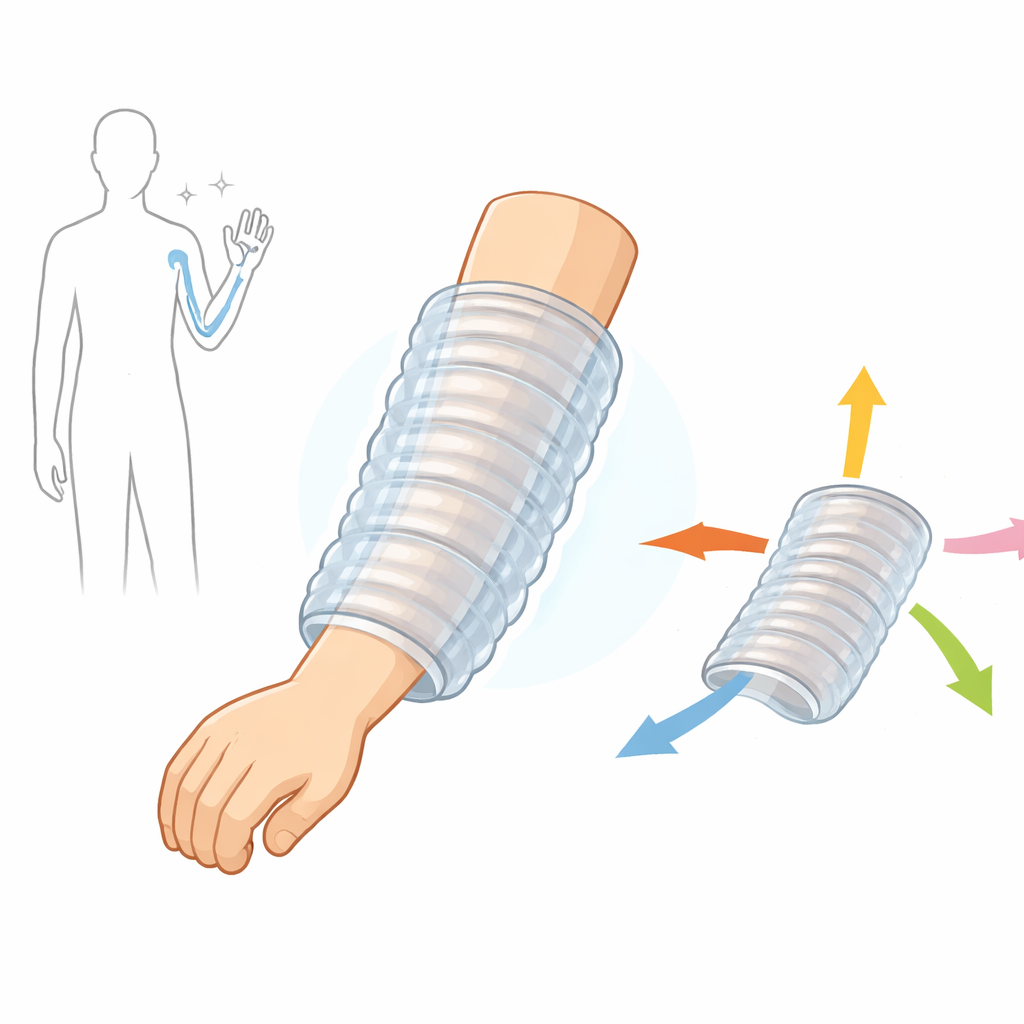
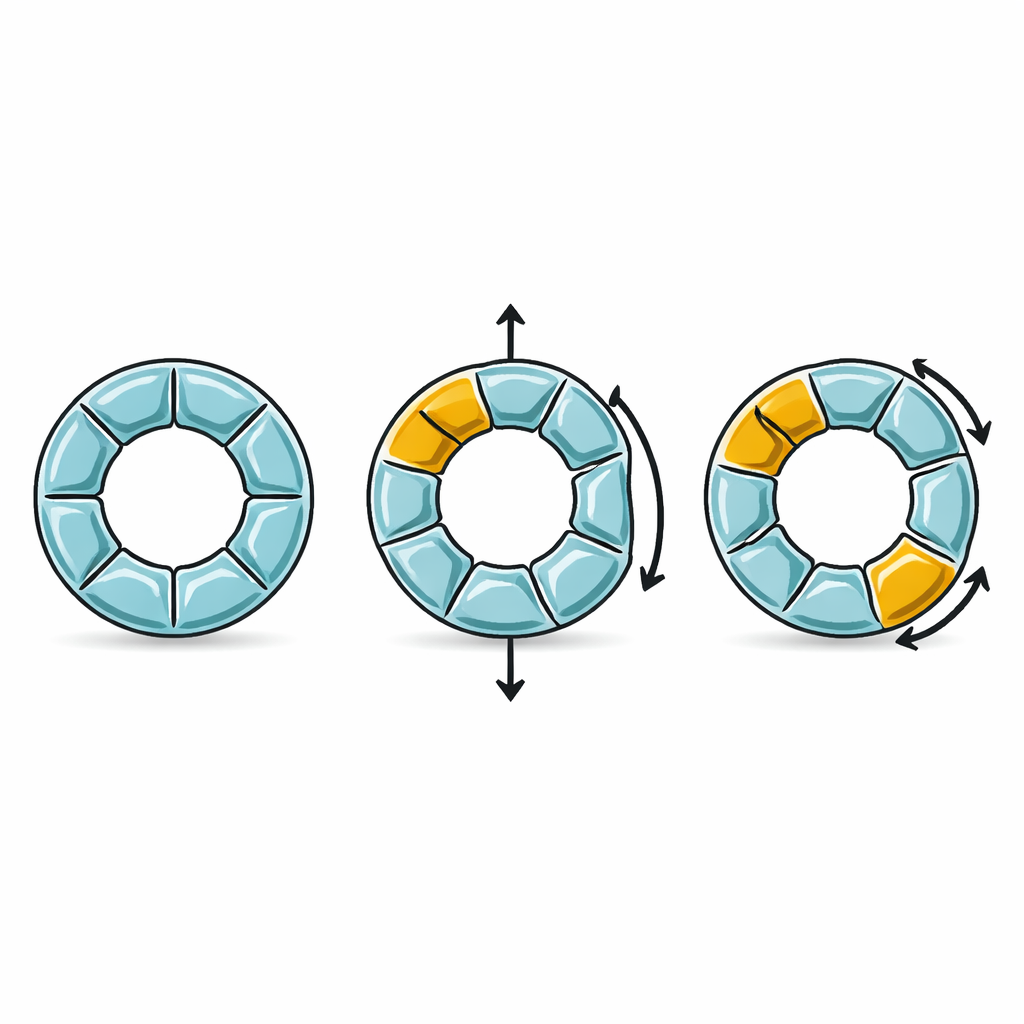
Il dispositivo introdotto qui, chiamato attuatore morbido a manicotto omnidirezionale, è ispirato all’agilità della proboscide di un elefante. Somiglia a un tubo cavo con costolature che può calzare su un arto o su un giunto robotico. All’interno delle pareti di questo tubo ci sono quattro camere d’aria separate disposte intorno alla circonferenza e modellate in pieghe a forma di V, simili ai mantici a concertina. Regolando la pressione dell’aria in ciascuna camera in modo indipendente, il manicotto può estendersi, accorciarsi attivamente sotto vuoto o piegarsi verso qualsiasi lato. Pressioni uguali in tutte le camere ne provocano l’allungamento; abbassare la pressione in modo simmetrico ne causa la contrazione; creare una differenza di pressione tra i lati lo fa curvare verso il lato più morbido e a pressione più bassa. Questa singola struttura fornisce quindi diversi tipi di movimento senza telai rigidi o strati esterni vincolanti.
Come una progettazione accurata e la stampa 3D lo fanno funzionare
Ottenere un movimento così versatile ha richiesto una messa a punto accurata della geometria e dei materiali del manicotto. I ricercatori hanno confrontato diverse forme delle pareti e strategie di rinforzo e hanno scoperto che un mantice piegato realizzato in poliuretano termoplastico flessibile, rinforzato da strati longitudinali di “tirante”, offriva la migliore combinazione di resistenza e flessibilità. Hanno variato sistematicamente caratteristiche come la larghezza delle pieghe, l’angolo delle pieghe, lo spessore delle pareti e il numero e lo spessore degli strati di tirante. Piega più larghe, per esempio, permettevano estensioni maggiori, mentre angoli di piega più piccoli miglioravano la generazione di forza ma aumentavano la rigidità. Hanno inoltre scoperto che l’uso di un materiale più morbido migliorava notevolmente sia l’escursione di flessione sia la corsa. Per fabbricare in modo affidabile queste forme intricate, il team ha sviluppato una ricetta dettagliata di stampa 3D per plastica flessibile su stampanti in stile Bowden, affrontando sfide come il controllo dell’umidità, l’intasamento dell’ugello, la rimozione dei supporti e la temperatura di stampa. Questo processo ha prodotto pareti ermetiche e parti ripetibili adatte alla produzione su larga scala.
Cosa rivelano i test su movimento e forza
Utilizzando una piattaforma di prova personalizzata con sensori precisi e regolatori di pressione, gli autori hanno misurato quanto intensamente e quanto lontano il manicotto fosse in grado di spingere, tirare e flettersi. A una pressione moderata di 130 kilopascal—inferiore a quella di molti attuatori morbidi esistenti—il manicotto ha generato fino a 60 newton di forza assiale, sufficiente ad assistere in modo significativo il movimento articolare, e si è esteso di circa 81 millimetri mentre poteva anche contrarsi di 25 millimetri sotto vuoto. Nella flessione ha raggiunto angoli fino a 45 gradi e ha prodotto 18 newton di forza di flessione. Questi risultati si confrontano favorevolmente con altri attuatori morbidi omnidirezionali, che spesso richiedono pressioni molto più alte per ottenere forze minori e non possono contrarsi attivamente. Il team ha anche dimostrato che il loro metodo di stampa 3D produce attuatori quasi identici da una stampa all’altra, e che con il controllo in retroazione il manicotto può seguire posizioni target con accuratezza sub‑millimetrica e rispondere in modo affidabile a frequenze di movimento da basse a moderate.
Cosa significa per i futuri robot indossabili
Per un pubblico non specialista, la conclusione chiave è che questo lavoro trasforma l’idea di un «manicotto muscolare» morbido e avvolgente in una tecnologia pratica e testata. Combinando un intelligente design interno a mantice con un processo di stampa 3D ingegnerizzato con cura, i ricercatori hanno creato un singolo dispositivo leggero che può flettersi in più direzioni, estendersi e tirare attivamente, il tutto a pressioni d’aria relativamente basse. Poiché è cavo e progettato per circondare un arto o un giunto, è particolarmente promettente per esoscheletri robotici indossabili, supporti medici e strumenti di riabilitazione che devono essere sicuri, confortevoli e compatti. Lavori futuri perfezioneranno l’adattamento del manicotto al corpo umano, integreranno sensori e controlli più intelligenti e lo combineranno con manicotti che consentono la torsione per creare movimenti ancora più naturali e simili a una proboscide per l’assistenza robotica quotidiana.
Citazione: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
Parole chiave: robotica morbida, esoscheletri indossabili, attuatori pneumatici, TPU stampato in 3D, dispositivi assistivi