Clear Sky Science · he
עיצוב, ייצור ובדיקת מפעיל שרוול רך ואומנידירקציונלי חדשני
מדוע שרוול רובוטי רך חשוב
דמיינו עתיד שבו שרוול קל כבד מטפח שקט מסייע לכיפוף מרפק קשיח, מייצב את ידו של מנתח או מלווה את זרועו של עובד מפעל — בלי שלדות מתכת מגושמות או מנועים רועשים. מאמר זה מציג בדיוק מכשיר כזה: שרוול רך המופעל באוויר, שיכול להתארך, להתקצר ולהסתווג בכל כיוון סביב גפה, ופותח אפשרויות חדשות לרובוטים לבישים נוחים ומכשירים מסייעים.
ממכונות קשיחות לעוזרים עדינים
רובוטים מסורתיים משתמשים ברכיבים מתכתיים קשים ובמנועים חשמליים — חזקים, אך עלולים להיות לא בטוחים או לא נוחים כאשר ממקמים אותם ישירות על הגוף האנושי. בעשור האחרון נקטה הרובוטיקה הרכה גישה שונה, המשתמשת בחומרים גמישים ולחץ אוויר ליצירת תנועה המדמה טוב יותר שרירים וגידים. עם זאת, רבים מהמפעילים הרכים נעים רק בכיוון אחד או שניים או דורשים לחצי אוויר גבוהים ומבנים מורכבים, מה שמקשה על לבישתם. המחברים שאפו לעצב מפעיל קומפקטי בצורת שרוול שיכול להקיף מפרק, להישאר נוח על הגוף ועדיין לייצר תנועה חזקה ומבוקרת בדיוק בכיוונים רבים בלחץ יחסית נמוך.
שרוול חדש שנע כמו חדק
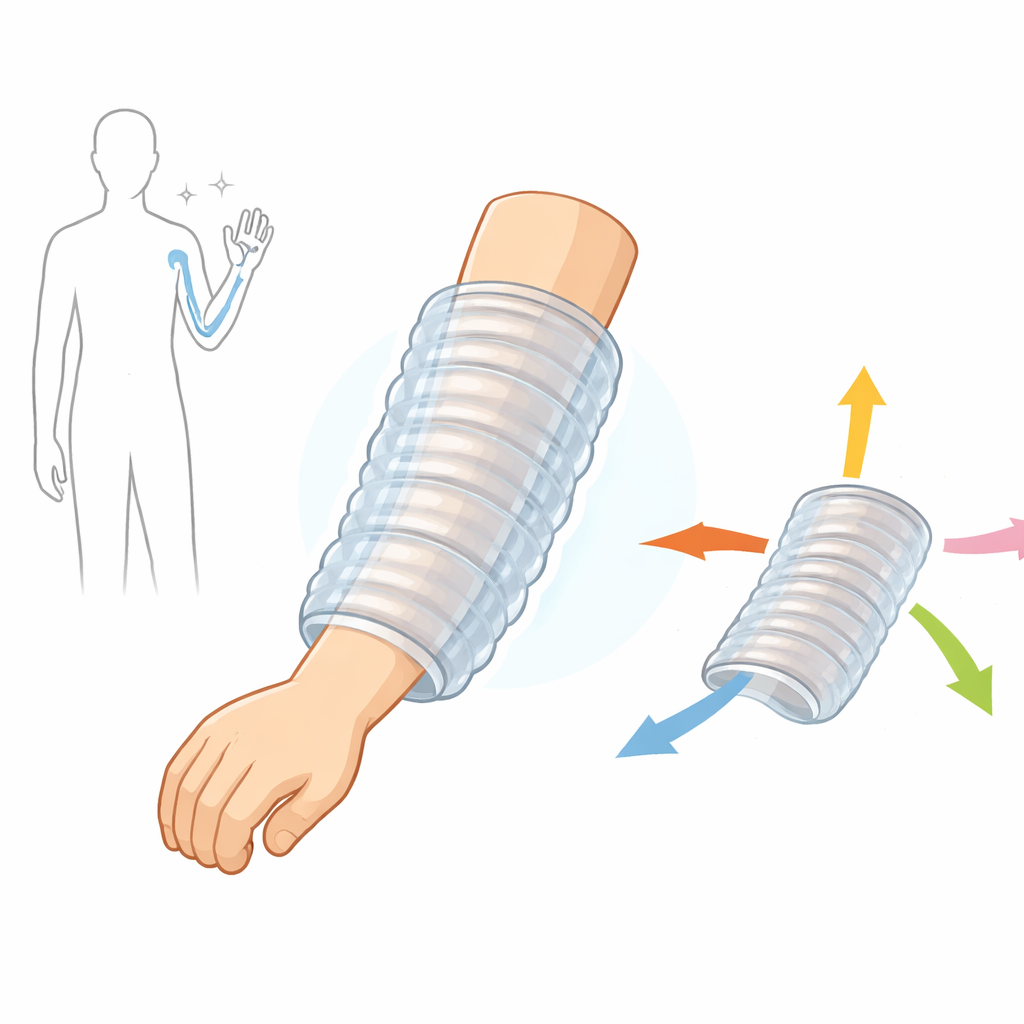
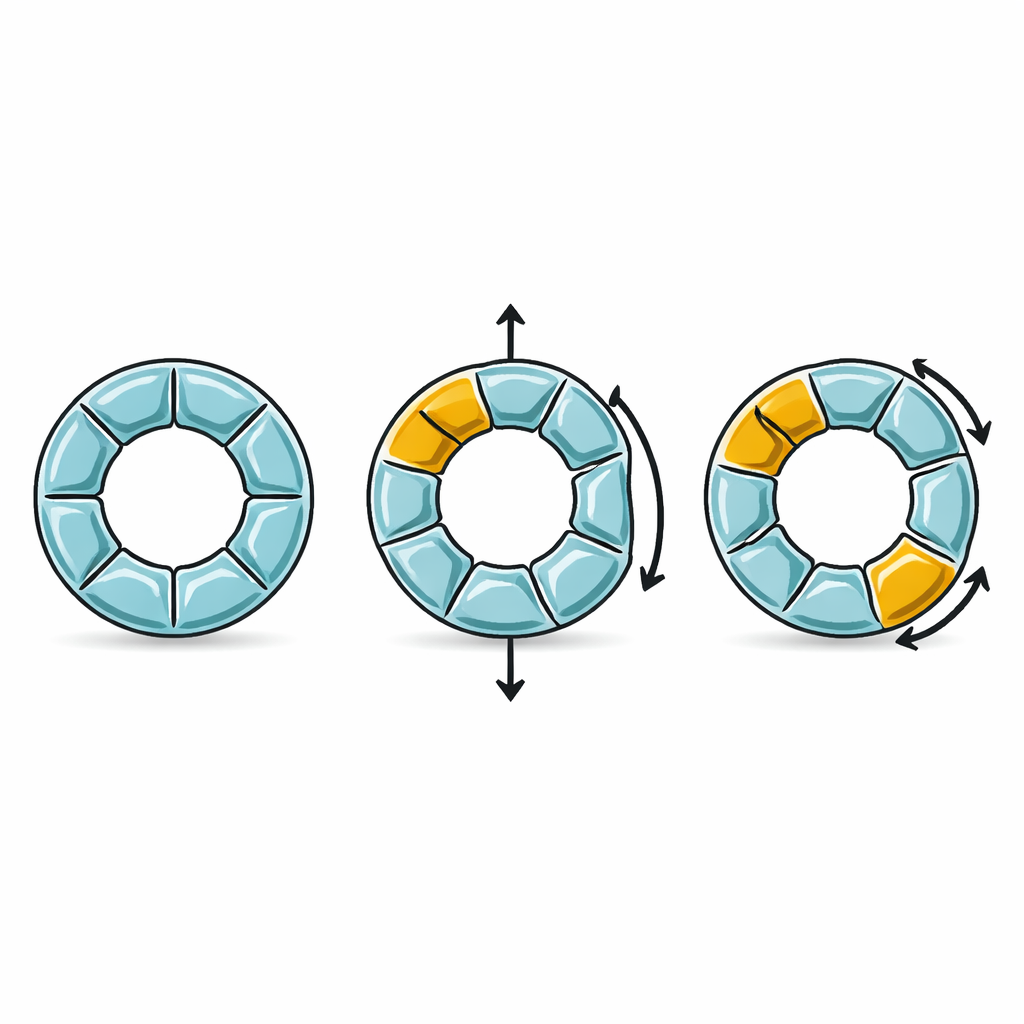
המכשיר המוצג כאן, שכונה מפעיל שרוול רך אומנידירקציונלי, הושפע מהזריזות של חדק פיל. נראה כמו צינור חלול עם צלעות שיכול להכנס על גפה או מפרק רובוטי. בתוך קירות הצינור יש ארבעת תאורי אוויר נפרדים המסודרים סביב ההיקף ומעוצבים לקפלים בצורת V, בדומה למשאבות קונצרטינה. על־ידי כוונון לחץ האוויר בכל תא בנפרד, השרוול יכול להתארך, להתקצר באופן פעיל בעזרת ואקום, או להתכופף לכיוון כל צד. לחץ שווה בכל התאים גורם להארכה; הורדת לחץ באופן סימטרי גורמת לכיווץ; ויצירת הבדל לחץ בין הצדדים גורמת לעקמום אל עבר הצד הרך והנמוך בלחץ. מבנה יחיד זה מספק אפוא סוגי תנועה מרובים ללא שלדות קשיחות או שכבות הגבלה חיצוניות.
כיצד עיצוב קפדני והדפסת תלת‑ממד עושים את עבודתן
להשגת תנועה כה ורסטילית נדרש כוונון מדוקדק של הגיאומטריה והחומרים של השרוול. החוקרים השוו צורות קיר שונות ואסטרטגיות חיזוק וגילו שקפלי בלווס עשויים פוליאורתרן תרמופלסטי גמיש, המחוזק בשכבות “קשירה” אורכיות, סיפקו את השילוב הטוב ביותר של חוזק וגמישות. הם שינו שיטתית תכונות כגון רוחב הקפל, זווית הקפל, עובי הקיר ומספר ועובי שכבות הקשירה. למשל, קפלים רחבים יותר אפשרו הארכות גדולות יותר, בעוד שזוויות קפל קטנות שיפרו יצירת כוח אך הגדילו את הקשיחות. הם גם גילו ששימוש בחומר רך יותר שיפר משמעותית הן את טווח הכיפוף והן את המהלך. כדי לייצר בצורה אמינה את הצורות המורכבות הללו, הצוות פיתח מתכון הדפסה תלת‑ממד מפורט לפלסטיק גמיש על מדפסות בסגנון Bowden, שהתמודד עם אתגרים כמו שליטה בלחות, סתימת פתיל, הסרת תמיכה וטמפרטורת הדפסה. התהליך הזה נתן קירות אטומי אוויר וחלקים שחוזרים על עצמם, המתאימים לייצור בקנה מידה גדול.
מה הבדיקות חושפות על התנועה והכוח
באמצעות פלטפורמת בדיקה מותאמת עם חיישנים מדויקים ומווסתי לחץ, המדד הצוות עד כמה חזק וכמה רחוק השרוול יכול ללחוץ, למשוך ולהתכופף. בלחץ צנוע של 130 קילופסקל — נמוך ממספר מפעילים רכים קיימים — השרוול ייצר עד 60 ניוטון של כוח צירי, מספיק כדי לסייע משמעותית בתנועת מפרק, והתארך בכ‑81 מילימטרים בערך בעודו גם מסוגל להתכווץ בכ‑25 מילימטרים תחת ואקום. בכיפוף, הגיע לזוויות של עד 45 מעלות וייצר 18 ניוטון של כוח כיפוף. תוצאות אלה משווים לטובה מול מפעילים רכים אומנידירקציונליים אחרים, שלעיתים נדרשים ללחצים גבוהים בהרבה כדי להשיג כוחות קטנים יותר ואינם יכולים להתכווץ באופן פעיל. הצוות הראה גם ששיטת ההדפסה שלהם מניבה מפעילים כמעט זהים מריצה לריצה, ושתחת בקרה עם משוב השרוול יכול לעקוב אחרי עמדות יעד בדיוק תת‑מילימטרי ולהגיב באופן אמין בתדרי תנועה נמוכים‑בינוניים.
מה זה אומר עבור רובוטים לבישים עתידיים
עבור קורא שאינו מומחה, המסקנה המרכזית היא שעבודה זו הופכת את רעיון "שרוול שרירי" רך העוטף לגוף לטכנולוגיה מעשית ונבדקת. באמצעות שילוב של עיצוב פנימי חכם בסגנון בלווס ותהליך הדפסה תלת‑ממד מהונדס בקפידה, יצרו החוקרים מכשיר יחיד וקל שיכול להתכופף במספר כיוונים, להתארך ולהתכווץ באופן פעיל — כל זאת בלחץ אוויר יחסית נמוך. מכיוון שהוא חלול ועוצב כדי להקיף גפה או מפרק, הוא מבטיח במיוחד ליישומים של שלדים חיצוניים לבישים, תמיכות רפואיות וכלי שיקום שצריכים להיות בטוחים, נוחים ודחוסים. עבודה עתידית תדייק את האופן שבו השרוול מתאים לגוף האדם, תוסיף חיישנים משולבים ובקרה חכמה יותר, ותשלב אותו עם שרוולים מסובבים כדי ליצור תנועה עוד יותר דמוית חדק וחיה לסיוע רובוטי יומיומי.
ציטוט: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
מילות מפתח: רובוטיקה רכה, שלדים חיצוניים לבישים, מפעילים פניאומטיים, TPU מודפס בתלת‑ממד, מכשירים מסייעים