Clear Sky Science · ru
Проектирование, изготовление и испытания нового всемерно направленного мягкого рукавного актуатора
Почему мягкий роботизированный рукав имеет значение
Представьте будущее, в котором лёгкий тканеподобный рукав тихо помогает кому‑то согнуть тугой локоть, стабилизировать руку хирурга или направить руку рабочего на заводе без громоздких металлических рам и шумных моторов. В этой статье представлен именно такое устройство: мягкий, пневматический рукав, который может растягиваться, укорачиваться и изгибаться в любом направлении вокруг конечности, открывая новые возможности для удобных ношимых роботов и ассистивных устройств.
От жёстких машин к деликатным помощникам
Традиционные роботы опираются на жёсткие металлические детали и электрические моторы, которые мощны, но могут быть небезопасны или неудобны при прямом контакте с телом человека. За последнее десятилетие мягкая робототехника выбрала иной путь, используя гибкие материалы и пневматическое давление для создания движений, больше напоминающих мышечные и сухожильные действия. Однако многие мягкие актуаторы двигаются только в одном‑двух направлениях или требуют высокого давления и сложных конструкций, что затрудняет их ношение. Авторы поставили задачу спроектировать компактный актуатор в форме рукава, который мог бы окружать сустав, быть комфортным на теле и при этом генерировать сильные, точно управляемые движения во многих направлениях при относительно низком давлении.
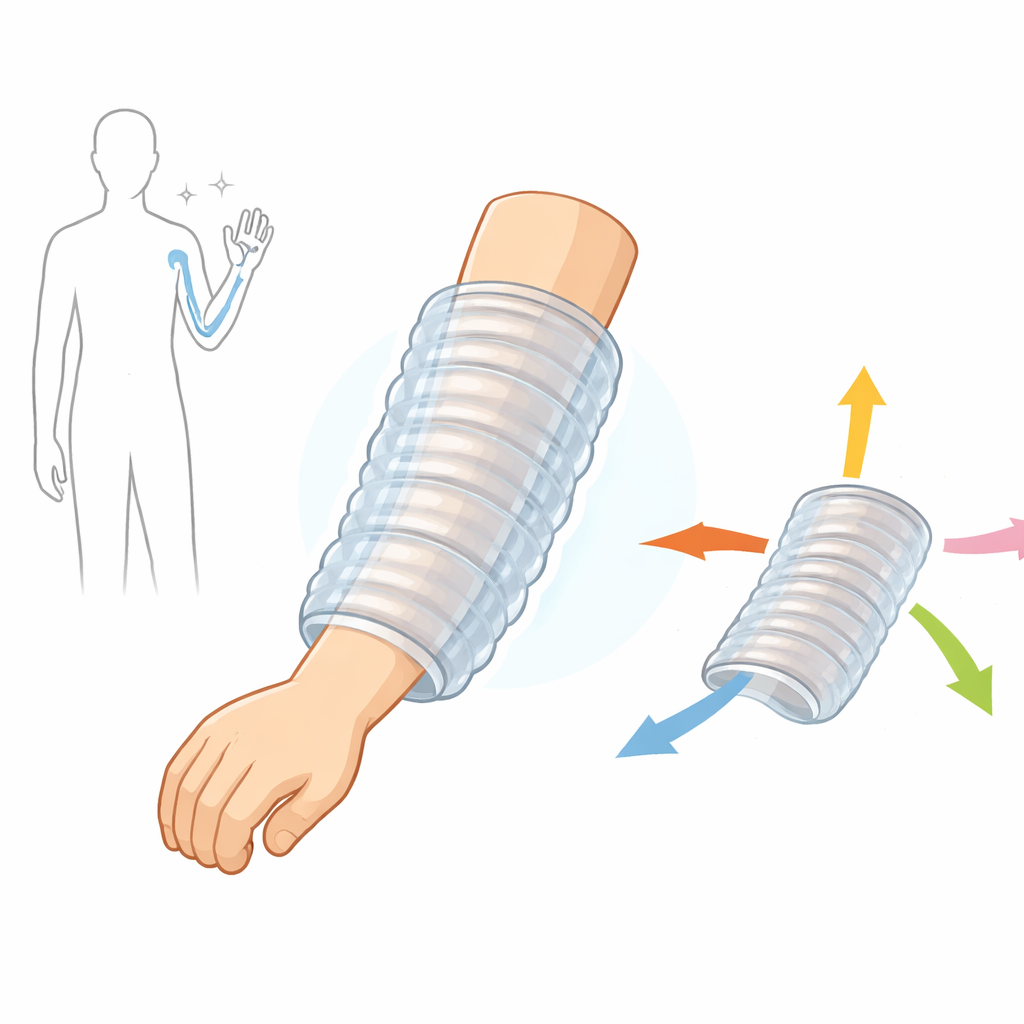
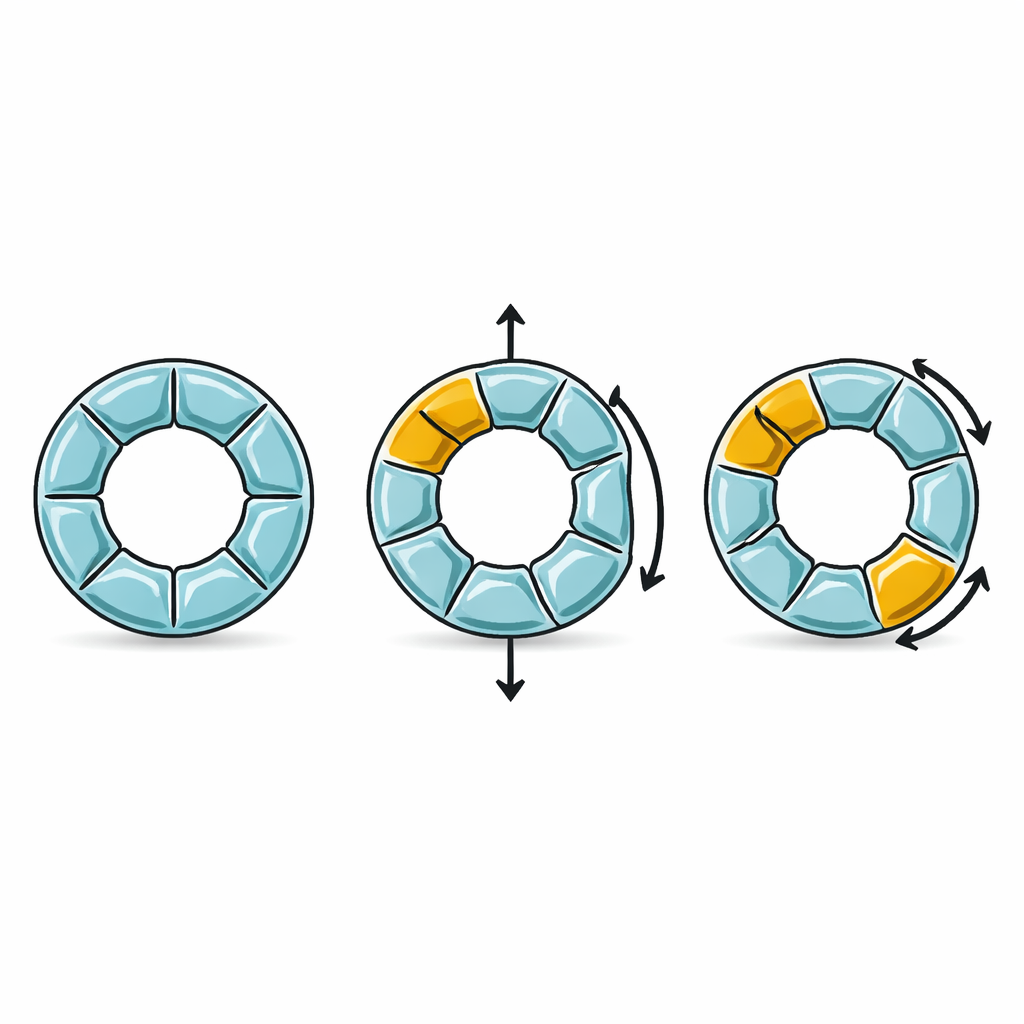
Новый рукав, который двигается как хобот
Представленное здесь устройство, названное всемерно направленным мягким рукавным актуатором, вдохновлено ловкостью хобота слона. Оно похоже на полую ребристую трубку, которая надевается на конечность или роботизированный сустав. Внутри стенок трубы расположены четыре отдельные воздушные камеры по окружности, сформированные в виде V‑образных складок, напоминающих гармошку-концертино. Регулируя давление в каждой камере независимо, рукав может удлиняться, активно укорачиваться при вакууме или изгибаться в любую сторону. Равное давление во всех камерах удлиняет его; симметричное понижение давления вызывает сокращение; а создание разницы давлений по сторонам заставляет его изгибаться в сторону более мягкой, с меньшим давлением, стороны. Таким образом единая конструкция обеспечивает несколько видов движения без жёстких рам или внешних ограничительных слоёв.
Как тщательный дизайн и 3D‑печать делают это возможным
Достижение такой универсальной кинематики потребовало точной настройки геометрии и материалов рукава. Исследователи сравнили различные формы стенок и стратегии усиления и обнаружили, что складчатая гармошка из гибкого термопластичного полиуретана, усиленная продольными «стяжными» слоями, даёт лучшую комбинацию прочности и гибкости. Они систематически варьировали параметры, такие как ширина и угол складки, толщина стенки и число и толщина стяжных слоёв. Широкие складки, например, позволяли добиться больших удлинений, тогда как меньшие углы складок улучшали генерируемую силу, но увеличивали жёсткость. Также было выявлено, что использование более мягкого материала существенно улучшает диапазон изгиба и ход. Для надёжного изготовления этих сложных форм команда разработала подробный рецепт 3D‑печати гибкого пластика на принтерах с подачей по Боудену, решив такие проблемы, как контроль влажности, засор сопла, удаление опор и температура печати. Этот процесс обеспечил герметичность стенок и повторяемость деталей, пригодных для масштабного производства.
Что показывают испытания о движении и силе
С помощью специализированной испытательной платформы с точными датчиками и регуляторами давления авторы измерили, с какой силой и на какое расстояние рукав может толкать, тянуть и изгибаться. При умеренном давлении в 130 килопаскалей — ниже, чем у многих существующих мягких актуаторов — рукав генерировал до 60 ньютонов осевой силы, что достаточно для заметной помощи в движении сустава, и удлинялся примерно на 81 миллиметр, при этом мог активно сокращаться на 25 миллиметров под вакуумом. При изгибе он достигал углов до 45 градусов и создавал 18 ньютонов усилия на изгиб. Эти результаты выгодно сравниваются с другими всемерно направленными мягкими актуаторами, которые часто требуют значительно более высоких давлений для получения меньших сил и не способны к активному сокращению. Команда также показала, что их метод 3D‑печати даёт почти идентичные актуаторы от серии к серии, и что при использовании обратной связи рукав может отслеживать целевые положения с субмиллиметровой точностью и надёжно реагировать при низко‑ и среднечастотных движениях.
Что это значит для будущих ношемых роботов
Для неспециалиста ключевой вывод таков: эта работа превращает идею мягкого обёртывающего «мышечного рукава» в практичную, испытанную технологию. Объединив продуманный внутренний дизайн гармошки с тщательно отлаженным процессом 3D‑печати, исследователи создали одно лёгкое устройство, которое может изгибаться в несколько направлений, удлиняться и активно втягиваться обратно — всё при относительно низком давлении воздуха. Поскольку оно полое и рассчитано на охват конечности или сустава, оно особенно перспективно для носимых роботизированных экзоскелетов, медицинских поддержек и средств реабилитации, которым требуются безопасность, комфорт и компактность. В будущем предстоит доработать прилегание рукава к телу человека, добавить встроенную сенсорику и более интеллектуальное управление, а также сочетать его со стягивающими или скручивающими элементами, чтобы получить ещё более правдоподобное, похожее на хобот движение для повседневной роботизированной помощи.
Цитирование: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
Ключевые слова: мягкая робототехника, ношенные экзоскелеты, пневматические актуаторы, 3D-печатный TPU, ассистивные приборы