Clear Sky Science · ar
تصميم وتصنيع واختبار مشغّل غلاف لين جديد متعدد الاتجاهات
لماذا يهم غلاف روبوتي لين
تخيل مستقبلاً حيث يساعد غلاف خفيف يشبه القماش بهدوء شخصاً على ثني مرفق متصلب، أو يثبت يد جراح، أو يوجّه ذراع عامل في مصنع دون إطارات معدنية ضخمة أو محركات صاخبة. تعرض هذه الورقة جهازاً من هذا النوع: غلاف لين يعمل بالهواء يمكنه التمطط والانكماش والانحناء في أي اتجاه حول طرف الجسم، فاتحاً إمكانيات جديدة للروبوتات القابلة للارتداء والأجهزة المساعدة المريحة.
من آلات صلبة إلى مساعدين رقيقين
تعتمد الروبوتات التقليدية على أجزاء معدنية صلبة ومحركات كهربائية، وهي قوية لكنها قد تكون خطرة أو غير مريحة عند وضعها مباشرة على جسم الإنسان. على مدى العقد الماضي، سلكت الروبوتات اللينة مساراً مختلفاً، مستخدمة مواد مرنة والضغط الهوائي لإنتاج حركات تشبه العضلات والأوتار أكثر. لكن العديد من المشغلات اللينة تتحرك في اتجاه واحد أو اثنين فقط أو تتطلب ضغوط هواء عالية وهياكل معقدة، ما يصعّب ارتدائها. سعى المؤلفون لتصميم مشغّل مدمج على شكل غلاف يمكنه إحاطة مفصل، ويظل مريحاً على الجسم، ويولد حركة قوية ومتحكم بها بدقة في عدة اتجاهات عند ضغط منخفض نسبياً.
غلاف جديد يتحرك مثل الخرطوم
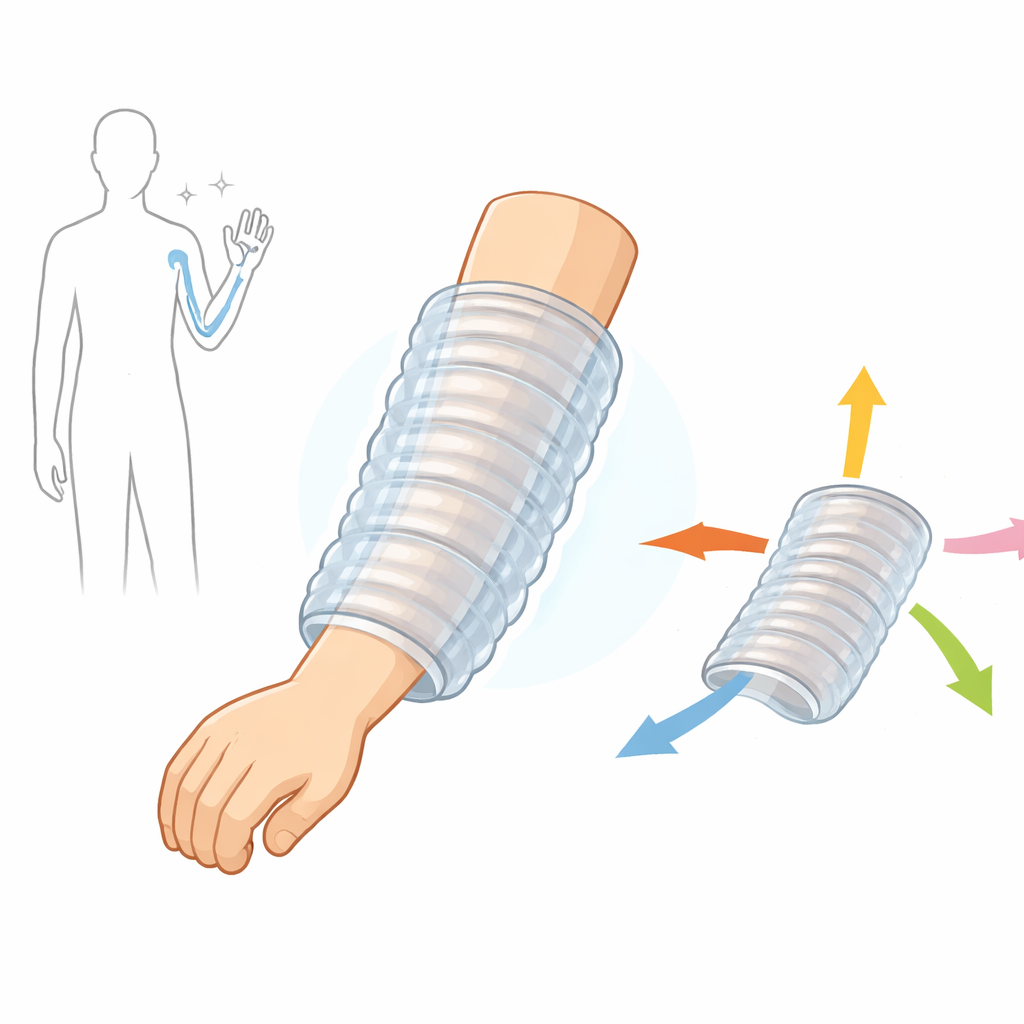
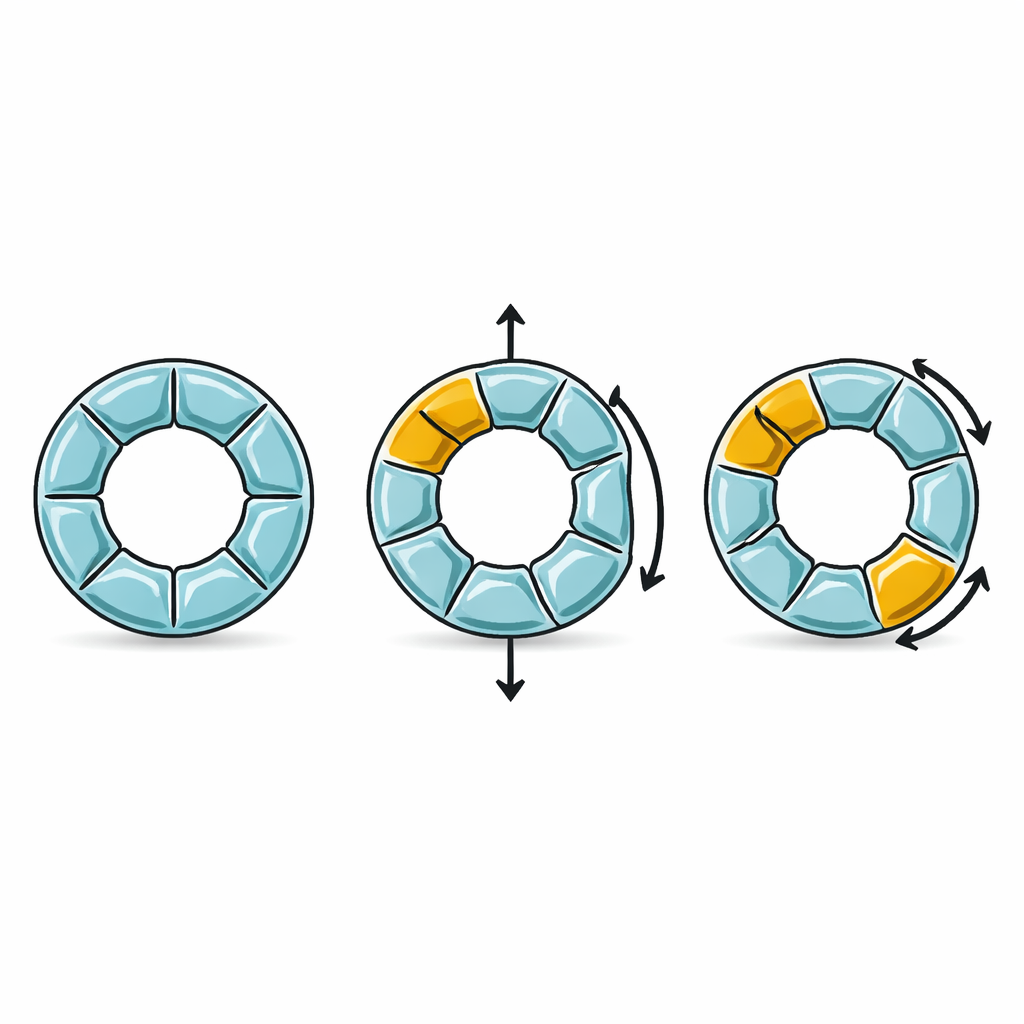
الجهاز المقدم هنا، المسمى مشغّل غلاف لين متعدد الاتجاهات، مستوحى من رشاقة خرطوم الفيل. يشبه أنبوباً مجوفاً مموجاً يمكن ارتداؤه فوق طرف أو مفصل روبوتي. داخل جدران هذا الأنبوب توجد أربع حجرات هوائية منفصلة مرتبة حول المحيط ومشكّلة على شكل طيات شبيهة بـ V، مماثلة لبلوزة الكونشيرتينا. من خلال ضبط ضغط الهواء في كل حجرة بشكل مستقل، يمكن للغلاف أن يتمدد، أو يقصر بشكل فعال تحت الفراغ، أو ينحني نحو أي جانب. يؤدي تساوي الضغط في جميع الحجرات إلى طولانه؛ وخفض الضغط بشكل متماثل يؤدي إلى انكماشه؛ وإحداث فرق في الضغط بين الجانبين يجعله ينحني نحو الجانب الأضعف وأقل ضغطاً. بهذه البنية الواحدة يوفر الغلاف أنواعاً متعددة من الحركة دون إطارات صلبة أو طبقات تقييد خارجية.
كيف يجعل التصميم الدقيق والطباعة ثلاثية الأبعاد ذلك ممكناً
تطلب تحقيق مثل هذه الحركة المتعددة تنسيقاً دقيقاً لهندسة الغلاف ومواد صنعه. قارن الباحثون أشكال الجدران واستراتيجيات الدعم المختلفة ووجدوا أن طيات بِلحَيط مرنة مصنوعة من بولي يوريثان حراري مرن، مدعمة بطبقات طولية «رابطة»، وفّرت أفضل مزيج من القوة والمرونة. قموا بتغيير خصائص منهجياً مثل عرض الطية، وزاوية الطية، وسمك الجدار، وعدد وسماكة طبقات الربط. سمحت الطيات الأعرض، على سبيل المثال، بتمدد أكبر، بينما حسّنت زوايا الطيات الأصغر توليد القوة لكن زادت الصلابة. كما اكتشفوا أن استخدام مادة أكثر ليونة حسن بشكل كبير كل من مدى الانحناء والإزاحة. ولتصنيع هذه الأشكال المعقدة بشكل موثوق، طور الفريق وصفة مفصلة للطباعة ثلاثية الأبعاد للبلاستيك المرن على طابعات من نوع Bowden، متناولين تحديات مثل التحكم بالرطوبة، وانسداد الفوهة، وإزالة الدعائم، ودرجة حرارة الطباعة. أنتجت هذه العملية جدراناً محكمة الإغلاق وأجزاء قابلة للتكرار مناسبة للتصنيع على نطاق واسع.
ماذا تكشف الاختبارات عن الحركة والقوة
باستخدام منصة اختبار مخصصة مع حساسات ومنظمات ضغط دقيقة، قاس المؤلفون مدى وقوة الدفع والسحب والانحناء التي يستطيع الغلاف تحقيقها. عند ضغط معتدل قدره 130 كيلوباسكال — أقل من كثير من المشغلات اللينة الموجودة — أنتج الغلاف ما يصل إلى 60 نيوتن من القوة المحورية، وهو ما يكفي للمساعدة المعنوية لحركة المفاصل، وتمدد بحوالي 81 ملم بينما كان قادراً أيضاً على الانكماش بمقدار 25 ملم تحت الفراغ. في الانحناء، وصل إلى زوايا تصل إلى 45 درجة وأنتج 18 نيوتن من قوة الانحناء. تقارن هذه النتائج بشكل جيد مع مشغلات لينة متعددة الاتجاهات الأخرى، التي غالباً ما تحتاج لضغوط أعلى بكثير لتحقيق قوى أصغر ولا يمكنها الانكماش بنشاط. أظهر الفريق أيضاً أن طريقة الطباعة ثلاثية الأبعاد تنتج مشغّلات متطابقة تقريباً من تشغيل لآخر، وأنه مع تحكم ردود الفعل يمكن للغلاف تتبع مواضع مستهدفة بدقة تحت الميلليمتر والاستجابة بشكل موثوق عند ترددات حركة منخفضة إلى متوسطة.
ماذا يعني هذا لروبوتات الارتداء المستقبلية
بالنسبة لغير المتخصصين، الخلاصة هي أن هذا العمل يحول فكرة «غلاف عضلي» لين ملفوف إلى تكنولوجيا عملية ومختبرة. من خلال الجمع بين تصميم داخلي ذكي على شكل بِلّونات وطريقة طباعة ثلاثية الأبعاد مهندَسة بعناية، أنشأ الباحثون جهازاً واحداً وخفيف الوزن يمكنه الانحناء في عدة اتجاهات، والتمدد، والسحب النشط للخلف، كل ذلك عند ضغط هواء منخفض نسبياً. وبما أنه مجوف ومصمم ليحيط بطرف أو مفصل، فهو واعد بشكل خاص للهياكل الخارجية القابلة للارتداء، والدعامات الطبية، وأدوات إعادة التأهيل التي يجب أن تكون آمنة ومريحة ومدمجة. سيعمل العمل المستقبلي على تحسين كيفية انطباق الغلاف على جسم الإنسان، وإضافة استشعار مدمج وتحكم أكثر ذكاءً، ودمجه مع أغطية ملفوفة ملتفة لإنتاج حركات أكثر شبهاً بالخرطوم لحياة يومية مساعدة روبوتية أكثر حيوية.
الاستشهاد: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
الكلمات المفتاحية: الروبوتات اللينة, الهياكل الخارجية القابلة للارتداء, المشغلات الهوائية, طباعة ثلاثية الأبعاد TPU, أجهزة مساعدة