Clear Sky Science · en
Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator
Why a soft robotic sleeve matters
Imagine a future where a lightweight fabric-like sleeve quietly helps someone bend a stiff elbow, steady a surgeon’s hand, or guide a factory worker’s arm without bulky metal frames or loud motors. This paper presents just such a device: a soft, air-powered sleeve that can stretch, shorten, and bend in any direction around a limb, opening new possibilities for comfortable wearable robots and assistive devices.
From rigid machines to gentle helpers
Traditional robots rely on hard metal parts and electric motors, which are powerful but can be unsafe or uncomfortable when placed directly on the human body. Over the last decade, soft robotics has taken a different path, using flexible materials and air pressure to create motion that better mimics muscles and tendons. Many soft actuators, however, move in only one or two directions or require high air pressures and complex structures, making them difficult to wear. The authors set out to design a compact, sleeve-shaped actuator that could surround a joint, stay comfortable on the body, and still generate strong, precisely controlled motion in many directions at relatively low pressure.
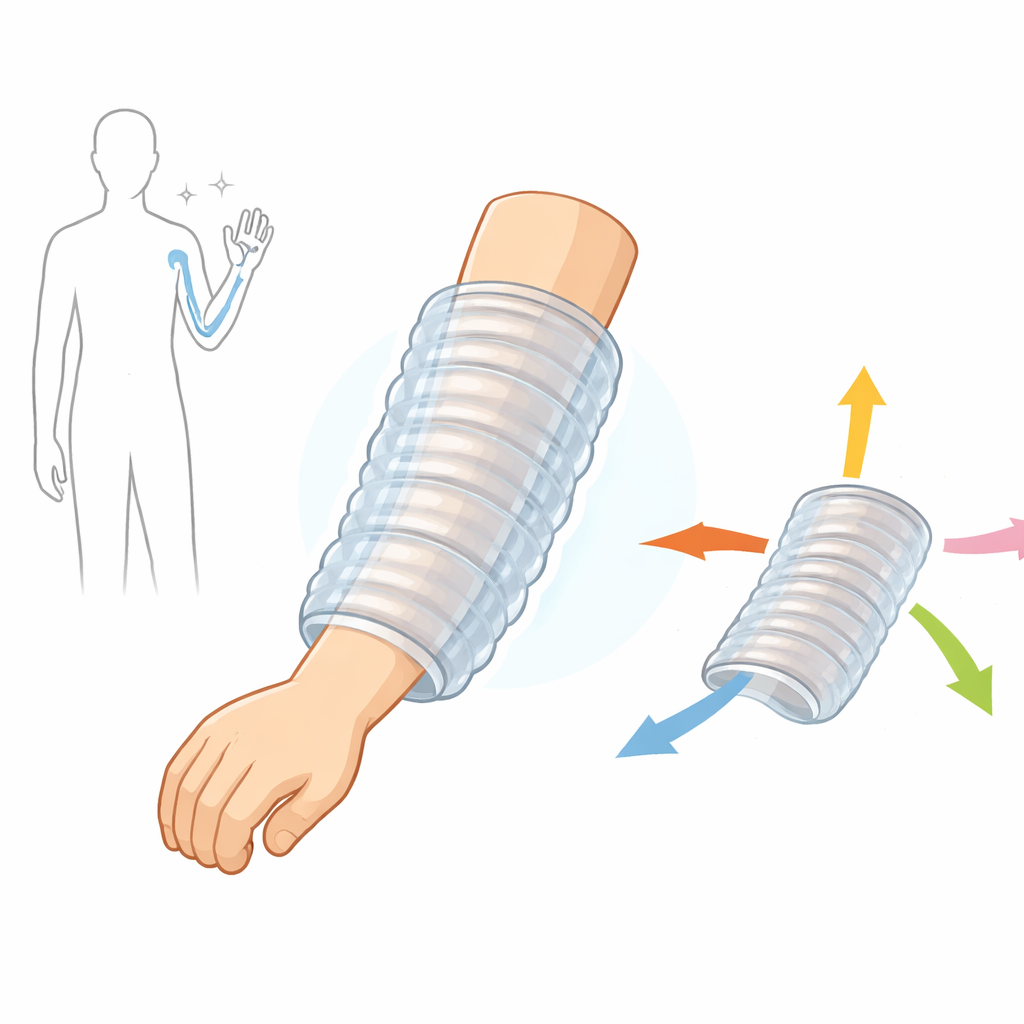
A new sleeve that moves like a trunk
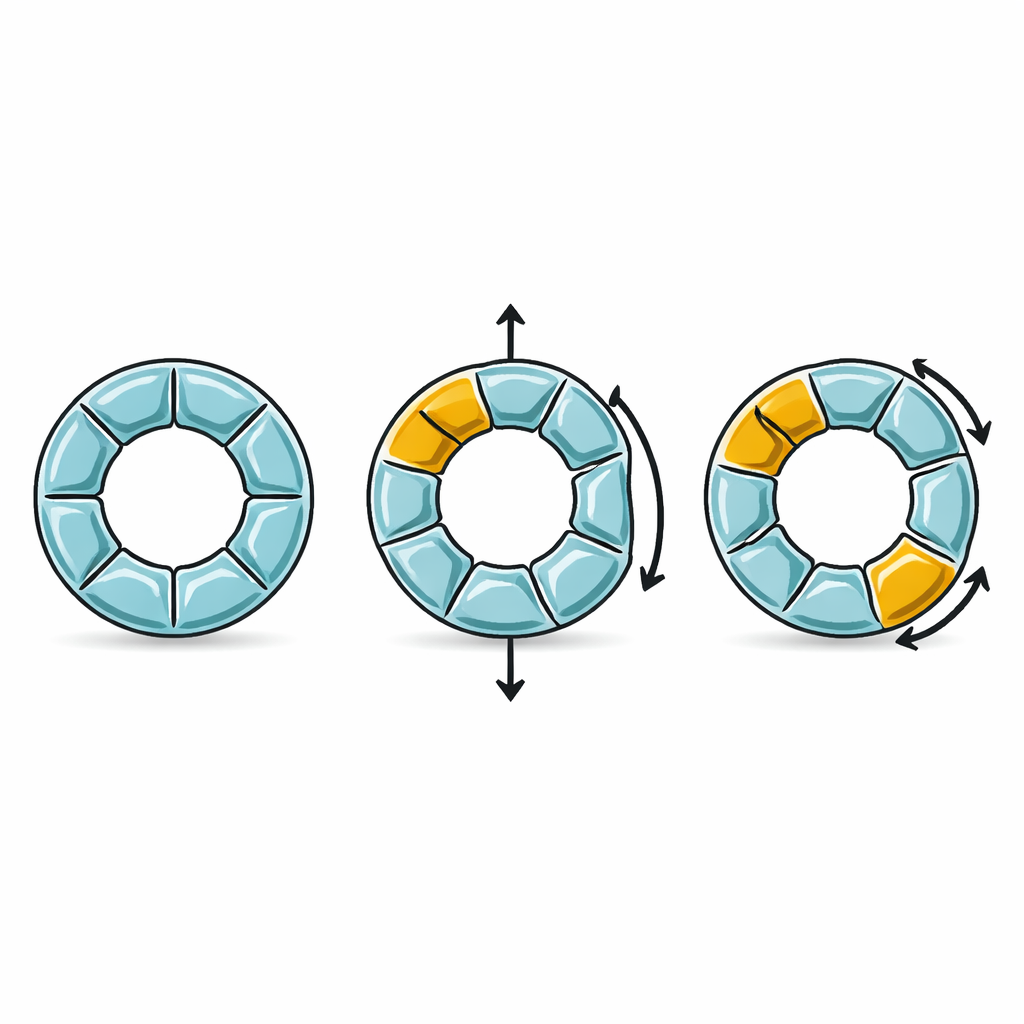
The device introduced here, called an omnidirectional soft sleeve actuator, is inspired by the agility of an elephant’s trunk. It looks like a hollow, ribbed tube that can fit over a limb or robotic joint. Inside the walls of this tube are four separate air chambers arranged around the circumference and shaped into V-like folds, similar to concertina bellows. By adjusting the air pressure in each chamber independently, the sleeve can extend, actively shorten under vacuum, or bend toward any side. Equal pressure in all chambers makes it lengthen; lowering pressure symmetrically makes it contract; and creating a pressure difference between sides makes it curve toward the softer, lower-pressure side. This single structure therefore provides multiple kinds of motion without rigid frames or external constraint layers.
How careful design and 3D printing make it work
Achieving such versatile movement required careful tuning of the sleeve’s geometry and materials. The researchers compared different wall shapes and support strategies and found that a folded bellows made from flexible thermoplastic polyurethane, reinforced by longitudinal “tie” layers, provided the best combination of strength and flexibility. They systematically varied features such as fold width, fold angle, wall thickness, and the number and thickness of tie layers. Wider folds, for example, allowed larger extensions, while smaller fold angles improved force generation but increased stiffness. They also discovered that using a softer material dramatically improved both bending range and stroke. To reliably manufacture these intricate shapes, the team developed a detailed 3D-printing recipe for flexible plastic on Bowden-style printers, addressing challenges such as humidity control, nozzle clogging, support removal, and print temperature. This process produced airtight walls and repeatable parts suitable for large-scale fabrication.
What the tests reveal about motion and strength
Using a custom test platform with precise sensors and pressure regulators, the authors measured how strongly and how far the sleeve could push, pull, and bend. At a modest pressure of 130 kilopascals—lower than many existing soft actuators—the sleeve generated up to 60 newtons of axial force, enough to meaningfully assist joint motion, and extended by about 81 millimeters while also being able to contract by 25 millimeters under vacuum. In bending, it reached angles up to 45 degrees and produced 18 newtons of bending force. These results compare favorably with other omnidirectional soft actuators, which often need far higher pressures to achieve smaller forces and cannot actively contract. The team also showed that their 3D-printing method yields nearly identical actuators from run to run, and that with feedback control the sleeve can track target positions with sub‑millimeter accuracy and respond reliably at low-to-moderate motion frequencies.
What this means for future wearable robots
For a non-specialist, the key takeaway is that this work turns the idea of a soft, wraparound “muscle sleeve” into a practical, tested technology. By combining a clever internal bellows design with a carefully engineered 3D-printing process, the researchers created a single, lightweight device that can bend in several directions, extend, and actively pull back, all at relatively low air pressure. Because it is hollow and designed to encircle a limb or joint, it is especially promising for wearable robotic exoskeletons, medical supports, and rehabilitation tools that must be safe, comfortable, and compact. Future work will refine how the sleeve fits the human body, add built‑in sensing and smarter control, and combine it with twisting sleeves to create even more lifelike, trunk‑like motion for everyday robotic assistance.
Citation: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
Keywords: soft robotics, wearable exoskeletons, pneumatic actuators, 3D printed TPU, assistive devices