Clear Sky Science · nl
Ontwerp, fabricage en testen van een nieuw omnidirectioneel zacht mouwactuator
Waarom een zachte robotmouw ertoe doet
Stel je een toekomst voor waarin een lichtgewicht, stofachtige mouw stilletjes helpt bij het buigen van een stijve elleboog, het stabiliseren van de hand van een chirurg of het begeleiden van de arm van een fabriekspersoneel — zonder lompe metalen frames of luide motoren. Dit artikel beschrijft precies zo’n apparaat: een zachte, door lucht aangedreven mouw die kan rekken, verkorten en in elke richting om een ledemaat heen kan buigen, wat nieuwe mogelijkheden opent voor comfortabele draagbare robots en ondersteunende hulpmiddelen.
Van stijve machines naar zachte helpers
Traditionele robots vertrouwen op harde metalen onderdelen en elektrische motoren, die wel krachtig zijn maar onveilig of oncomfortabel kunnen zijn wanneer ze direct op het menselijk lichaam worden geplaatst. In het afgelopen decennium heeft soft robotics een andere koers gekozen door flexibele materialen en luchtdruk te gebruiken om beweging te maken die spieren en pezen beter nabootst. Veel zachte actuatoren bewegen echter maar in één of twee richtingen of vereisen hoge luchtdrukken en complexe constructies, waardoor ze lastig draagbaar zijn. De auteurs wilden een compacte, mouwvormige actuator ontwerpen die een gewricht kan omringen, comfortabel op het lichaam blijft en toch sterke, nauwkeurig te regelen beweging in meerdere richtingen kan genereren bij relatief lage druk.
Een nieuwe mouw die beweegt als een slurf
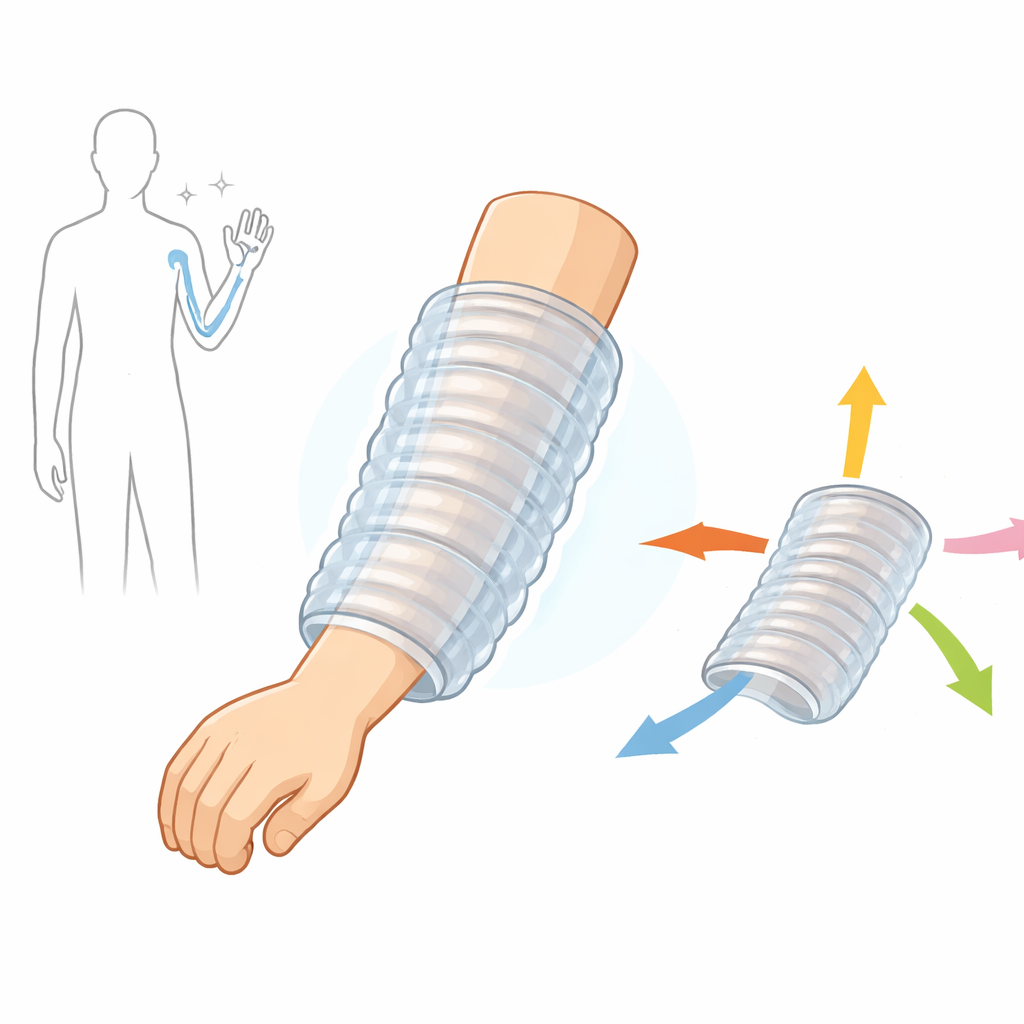
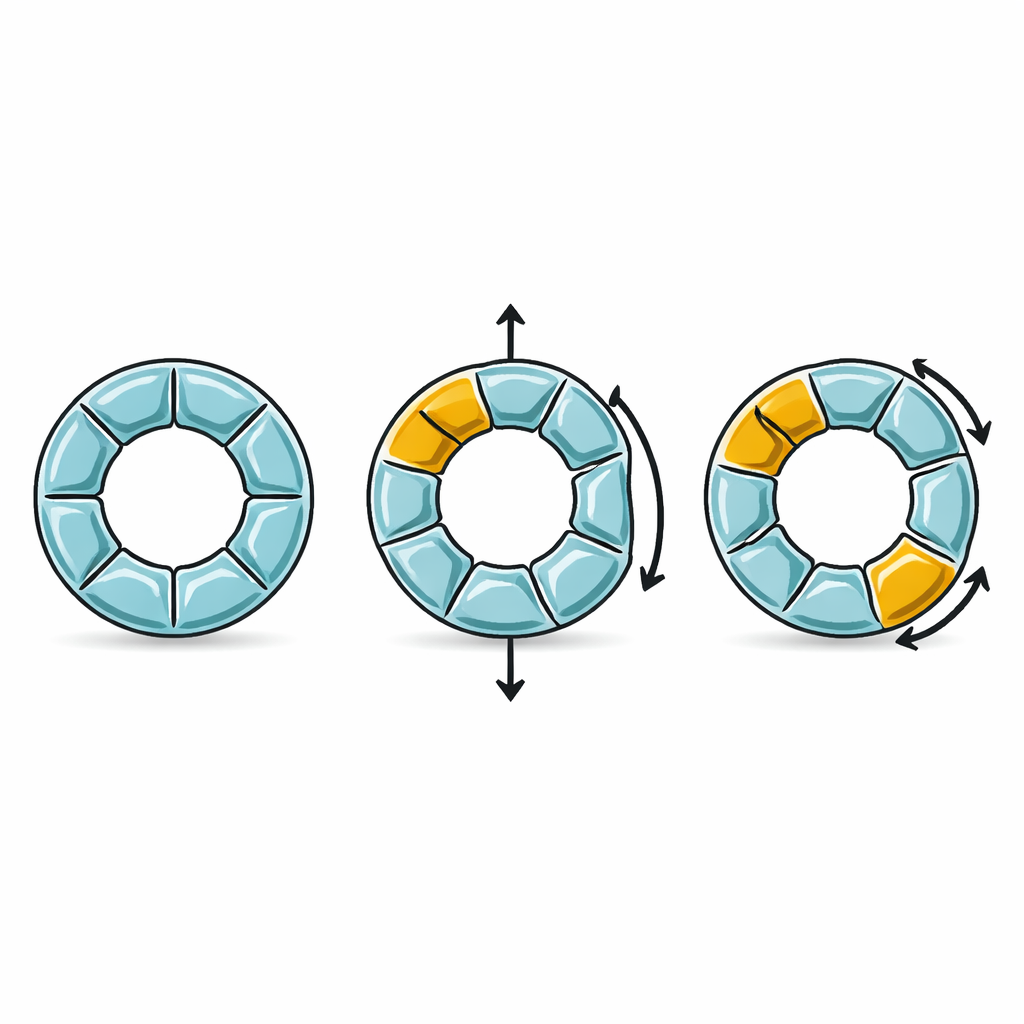
Het hier gepresenteerde apparaat, een omnidirectionele zachte mouwactuator genoemd, is geïnspireerd op de beweeglijkheid van een olifantenslurf. Het lijkt op een holle, geribbelde buis die over een ledemaat of robotisch gewricht past. In de wanden van deze buis bevinden zich vier afzonderlijke luchtkamers die rondom de omtrek zijn gerangschikt en gevormd zijn als V‑achtige plooien, vergelijkbaar met concertina‑balgjes. Door de luchtdruk in elke kamer onafhankelijk aan te passen, kan de mouw verlengen, actief inkorten onder vacuüm of in elke richting buigen. Gelijke druk in alle kamers laat hem verlengen; symmetrisch verlagen van de druk laat hem samentrekken; en het creëren van een drukverschil tussen zijden maakt dat hij naar de zachtere, lagere drukzijde kromt. Deze enkele structuur biedt dus meerdere bewegingsvormen zonder stijf frame of externe beperkingslagen.
Hoe zorgvuldig ontwerp en 3D‑printen het laten werken
Het bereiken van zulke veelzijdige beweging vroeg om zorgvuldige afstemming van geometrie en materialen van de mouw. De onderzoekers vergeleken verschillende wandvormen en ondersteuningsstrategieën en vonden dat een gevouwen balg gemaakt van flexibel thermoplastisch polyurethaan, versterkt door longitudinale "tie"‑lagen, de beste combinatie van sterkte en flexibiliteit bood. Ze varieerden systematisch kenmerken zoals plooi‑breedte, plooi‑hoek, wanddikte en het aantal en de dikte van tie‑lagen. Brede plooien maakten bijvoorbeeld grotere extensies mogelijk, terwijl kleinere plooihoeken de krachtgeneratie verbeterden maar de stijfheid verhoogden. Ze ontdekten ook dat het gebruik van een zachter materiaal de buigradius en slagwijdte aanzienlijk verbeterde. Om deze ingewikkelde vormen betrouwbaar te vervaardigen, ontwikkelde het team een gedetailleerd 3D‑printrecept voor flexibel plastic op Bowden‑printers, waarbij uitdagingen als vochtigheidsregeling, verstopping van de nozzle, verwijdering van supports en printtemperatuur werden aangepakt. Dit proces leverde luchtdichte wanden en reproduceerbare onderdelen op die geschikt zijn voor grootschalige fabricage.
Wat de tests laten zien over beweging en kracht
Met een aangepast testplatform met nauwkeurige sensoren en drukregelaars maten de auteurs hoe sterk en hoe ver de mouw kon duwen, trekken en buigen. Bij een bescheiden druk van 130 kilopascal — lager dan veel bestaande zachte actuatoren — genereerde de mouw tot 60 newton axiale kracht, genoeg om gewrichtsbeweging zinvol te ondersteunen, en verlengde hij zich ongeveer 81 millimeter terwijl hij onder vacuüm ook 25 millimeter kon inkorten. Bij buigen bereikte hij hoeken tot 45 graden en leverde hij 18 newton buigkracht. Deze resultaten vergelijken gunstig met andere omnidirectionele zachte actuatoren, die vaak veel hogere drukken nodig hebben om kleinere krachten te bereiken en niet actief kunnen samentrekken. Het team toonde ook aan dat hun 3D‑printmethode vrijwel identieke actuatoren van run tot run oplevert, en dat de mouw met feedbackregeling doelposities met sub‑millimeter nauwkeurigheid kan volgen en betrouwbaar reageert bij lage tot matige bewegingsfrequenties.
Wat dit betekent voor toekomstige draagbare robots
Voor niet‑specialisten is de belangrijkste conclusie dat dit werk het idee van een zachte, omhullende "spiermouw" omzet in een praktische, geteste technologie. Door een slim intern balgontwerp te combineren met een zorgvuldig ontwikkeld 3D‑printproces, creëerden de onderzoekers een enkel, lichtgewicht apparaat dat in meerdere richtingen kan buigen, verlengen en actief terugtrekken, allemaal bij relatief lage luchtdruk. Omdat het hol is en ontworpen om een ledemaat of gewricht te omsluiten, heeft het veelbelovende toepassingen voor draagbare robotische exoskeletten, medische steunen en revalidatiehulpmiddelen die veilig, comfortabel en compact moeten zijn. Toekomstig werk zal verfijnen hoe de mouw op het menselijk lichaam past, ingebouwde sensoren en slimmer besturing toevoegen en het combineren met draaiende mouwen om nog levensechtere, slurfachtige bewegingen te creëren voor alledaagse robotondersteuning.
Bronvermelding: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
Trefwoorden: soft robotics, draagbare exoskeletten, pneumatische actuatoren, 3D-geprint TPU, ondersteunende apparaten