Clear Sky Science · es
Diseño, fabricación y ensayo de un novedoso actuador blando en forma de manga omnidireccional
Por qué importa una manga robótica blanda
Imagine un futuro en el que una manga ligera, similar a una tela, ayuda discretamente a alguien a doblar un codo rígido, estabilizar la mano de un cirujano o guiar el brazo de un operario de fábrica sin marcos metálicos voluminosos ni motores ruidosos. Este artículo presenta precisamente ese dispositivo: una manga blanda accionada por aire que puede estirarse, acortarse y doblarse en cualquier dirección alrededor de una extremidad, abriendo nuevas posibilidades para robots vestibles cómodos y dispositivos de asistencia.
De las máquinas rígidas a los ayudantes suaves
Los robots tradicionales dependen de piezas metálicas rígidas y motores eléctricos, que son potentes pero pueden resultar inseguros o incómodos cuando se colocan directamente sobre el cuerpo humano. En la última década, la robótica blanda ha seguido un camino distinto, usando materiales flexibles y presión de aire para generar movimiento que imita mejor a los músculos y tendones. Sin embargo, muchos actuadores blandos se mueven solo en una o dos direcciones o requieren presiones de aire altas y estructuras complejas, lo que los hace difíciles de llevar puestos. Los autores se propusieron diseñar un actuador compacto en forma de manga que pudiera rodear una articulación, resultar cómodo sobre el cuerpo y aun así generar movimiento fuerte y controlado con precisión en múltiples direcciones con presiones relativamente bajas.
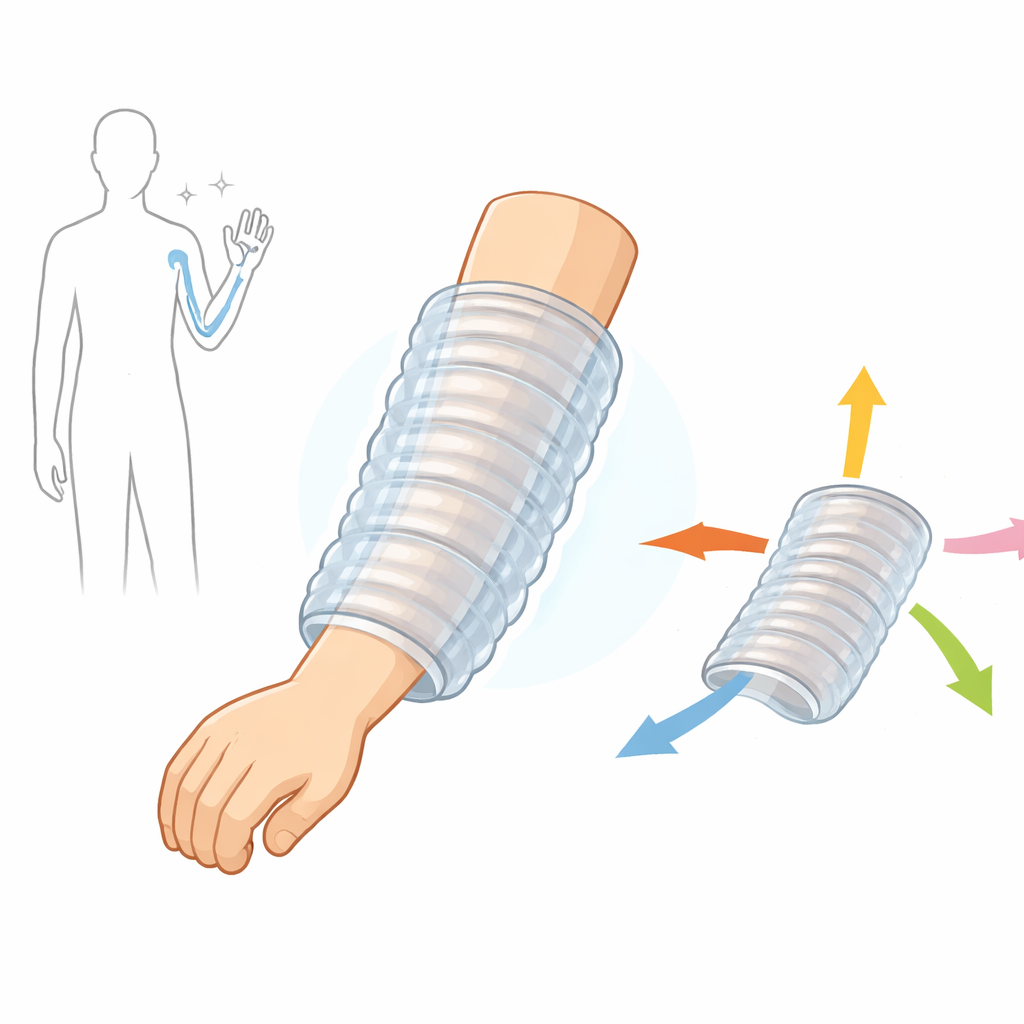
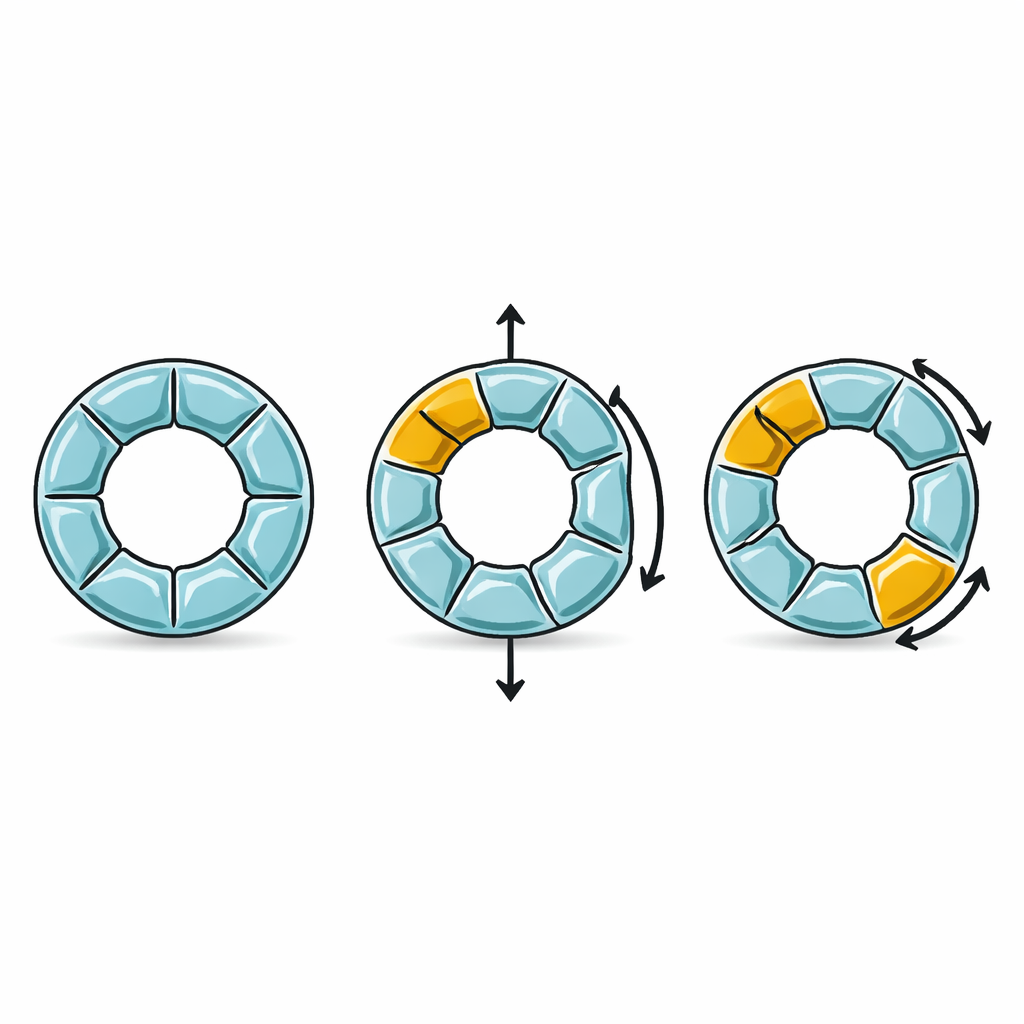
Una nueva manga que se mueve como una trompa
El dispositivo presentado aquí, denominado actuador blando de manga omnidireccional, está inspirado en la agilidad de la trompa de un elefante. Se parece a un tubo hueco con costillas que puede ajustarse sobre una extremidad o una articulación robótica. Dentro de las paredes de este tubo hay cuatro cámaras de aire separadas dispuestas alrededor de la circunferencia y conformadas en pliegues en forma de V, similares a los fuelles de un concertina. Al ajustar la presión de aire en cada cámara de forma independiente, la manga puede extenderse, acortarse activamente mediante vacío o curvarse hacia cualquier lado. La presión igual en todas las cámaras hace que se alargue; reducir la presión simétricamente la contrae; y crear una diferencia de presión entre los lados la hace curvarse hacia el lado más blando y de menor presión. Esta única estructura proporciona por tanto múltiples tipos de movimiento sin marcos rígidos ni capas externas restrictivas.
Cómo el diseño cuidadoso y la impresión 3D lo hacen funcionar
Lograr un movimiento tan versátil requirió afinar con cuidado la geometría y los materiales de la manga. Los investigadores compararon diferentes formas de pared y estrategias de soporte y encontraron que unos fuelles plegados hechos de poliuretano termoplástico flexible, reforzados por capas longitudinales de “amarre”, ofrecían la mejor combinación de resistencia y flexibilidad. Variaron sistemáticamente características como el ancho del pliegue, el ángulo del pliegue, el espesor de la pared y el número y grosor de las capas de amarre. Por ejemplo, pliegues más anchos permitían extensiones mayores, mientras que ángulos de pliegue más pequeños mejoraban la generación de fuerza pero aumentaban la rigidez. También descubrieron que el uso de un material más blando mejoraba de forma notable tanto el rango de flexión como el recorrido. Para fabricar de manera fiable estas formas intrincadas, el equipo desarrolló una receta detallada de impresión 3D para plástico flexible en impresoras estilo Bowden, abordando retos como el control de la humedad, obstrucción de boquillas, retirada de soportes y temperatura de impresión. Este proceso produjo paredes herméticas al aire y piezas repetibles aptas para fabricación a gran escala.
Qué revelan las pruebas sobre movimiento y fuerza
Usando una plataforma de ensayo personalizada con sensores precisos y reguladores de presión, los autores midieron con qué fuerza y hasta qué distancia la manga podía empujar, tirar y doblarse. A una presión modesta de 130 kilopascales—más baja que la de muchos actuadores blandos existentes—la manga generó hasta 60 newton de fuerza axial, suficiente para asistir de forma significativa el movimiento de una articulación, y se extendió alrededor de 81 milímetros mientras que también pudo contraerse 25 milímetros bajo vacío. En flexión, alcanzó ángulos de hasta 45 grados y produjo 18 newton de fuerza de flexión. Estos resultados se comparan favorablemente con otros actuadores blandos omnidireccionales, que a menudo necesitan presiones mucho mayores para lograr fuerzas menores y no pueden contraerse activamente. El equipo también demostró que su método de impresión 3D produce actuadores casi idénticos de una ejecución a otra, y que con control por retroalimentación la manga puede seguir posiciones objetivo con precisión submilimétrica y responder de forma confiable a frecuencias de movimiento bajas a moderadas.
Qué significa esto para los robots vestibles futuros
Para un público no especializado, la conclusión clave es que este trabajo convierte la idea de una “manga muscular” blanda y envolvente en una tecnología práctica y probada. Al combinar un ingenioso diseño interno de fuelle con un proceso de impresión 3D cuidadosamente desarrollado, los investigadores crearon un único dispositivo ligero que puede doblarse en varias direcciones, extenderse y retraerse activamente, todo con presiones de aire relativamente bajas. Debido a que es hueca y está diseñada para rodear una extremidad o articulación, resulta especialmente prometedora para exoesqueletos robóticos vestibles, soportes médicos y herramientas de rehabilitación que deben ser seguros, cómodos y compactos. Trabajos futuros afinarán cómo la manga se ajusta al cuerpo humano, añadirán sensores integrados y control más inteligente, y la combinarán con mangas de torsión para crear un movimiento aún más realista y tipo trompa para la asistencia robótica cotidiana.
Cita: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
Palabras clave: robótica blanda, exoesqueletos vestibles, actuadores neumáticos, TPU impreso en 3D, dispositivos de asistencia