Clear Sky Science · tr
Yeni yönlü yumuşak kılıf aktüatörünün tasarımı, üretimi ve test edilmesi
Neden yumuşak bir robotik kılıf önemli
Hafif, kumaş benzeri bir kılıfın; hantal metal iskeletler veya gürültülü motorlar olmadan, sert bir dirseğin bükülmesine yardımcı olduğu, bir cerrahın elini sabitlediği veya bir fabrika çalışanının kolunu yönlendirdiği bir gelecek hayal edin. Bu makale tam da böyle bir cihazı sunuyor: bir uzvun etrafında her yönde uzayıp kısalabilen ve bükülebilen, hava ile çalışan yumuşak bir kılıf; konforlu giyilebilir robotlar ve destekleyici cihazlar için yeni olanaklar açıyor.
Sert makinalardan nazik yardımcıya
Geleneksel robotlar sert metal parçalar ve elektrik motorlarına dayanır; bunlar güçlüdür fakat doğrudan insan vücuduna yerleştirildiklerinde güvenli veya rahat olmayabilir. Son on yılda yumuşak robotik farklı bir yol izledi: esnek malzemeler ve hava basıncı kullanarak kasları ve tendonları daha iyi taklit eden hareketler üretti. Ancak birçok yumuşak aktüatör yalnızca bir veya iki yönde hareket ediyor ya da yüksek hava basınçları ve karmaşık yapılar gerektirdiği için giyilebilirliği zorlaşıyor. Yazarların hedefi, bir eklemi çevreleyebilen, vücutta rahat kalabilen ve nispeten düşük basınçta çok yönlü, güçlü ve hassas kontrollü hareket üretebilen kompakt, kılıf biçimli bir aktüatör tasarlamaktı.
Bir gövde gibi hareket eden yeni bir kılıf
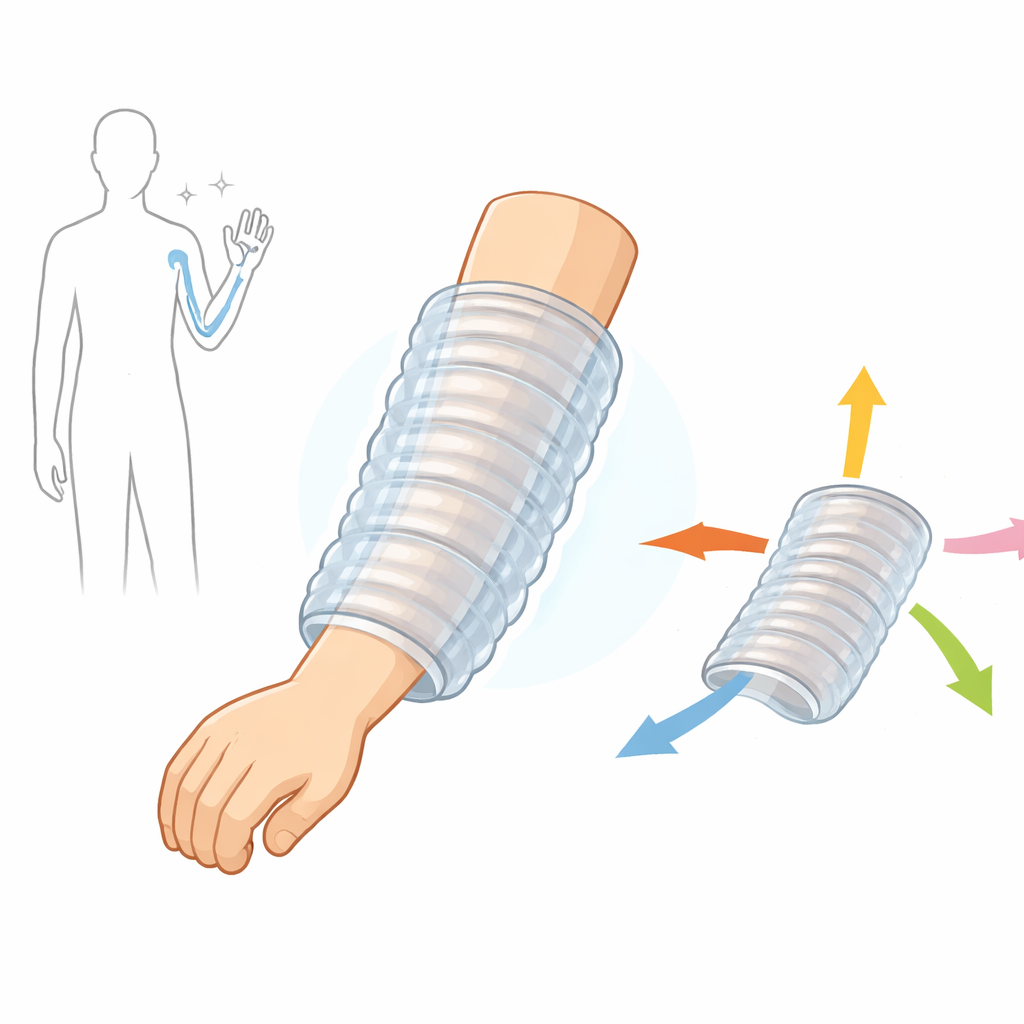
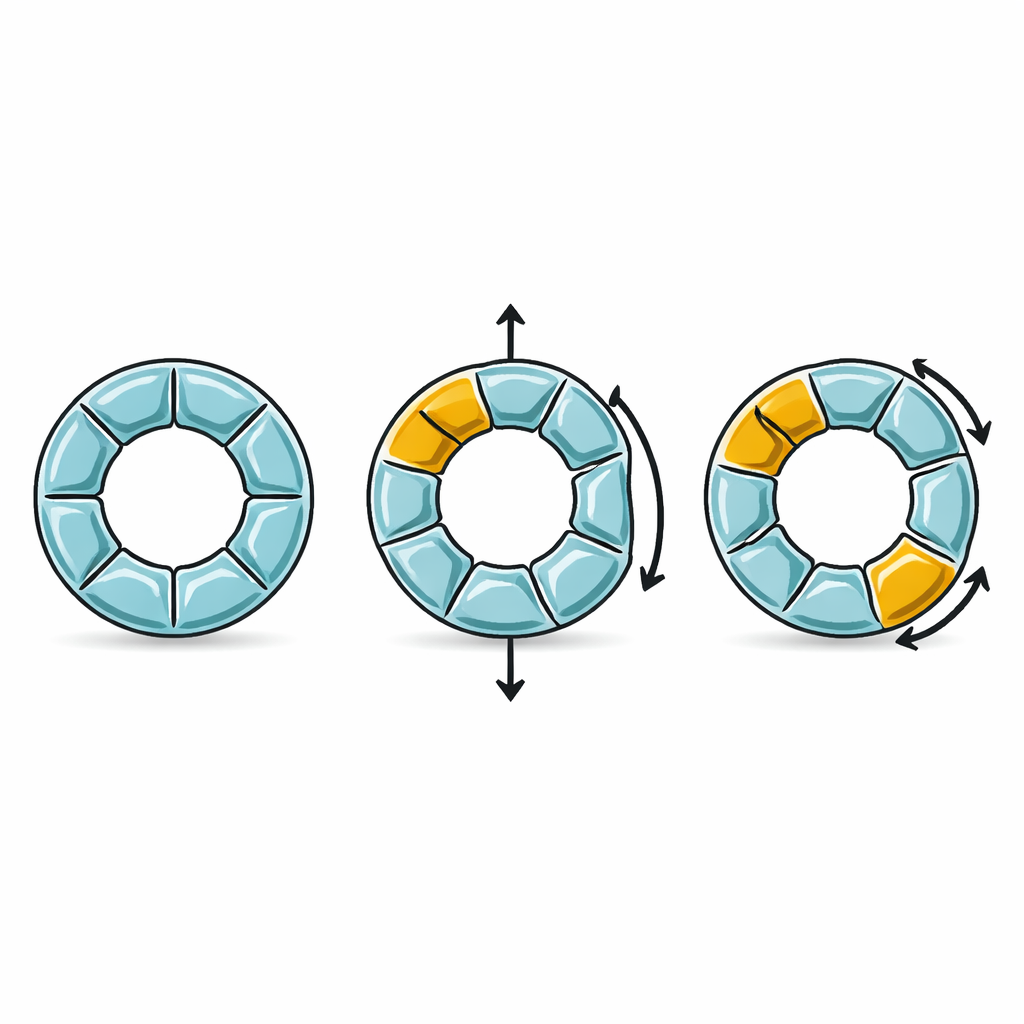
Burada tanıtılan cihaz, çok yönlü yumuşak kılıf aktüatörü adını taşıyor ve bir fil gövdesinin çevikliğiyle esinlenilmiş. Uzvun veya robotik bir eklemin üzerine geçirilebilen, içi boş ve kaburgalı bir tüp görünümünde. Bu tüpün duvarları içinde çevre boyunca düzenlenmiş ve akordeon körüklerini andıran V biçimli katlara şekillendirilmiş dört ayrı hava odası bulunuyor. Her odadaki hava basıncını bağımsız olarak ayarlayarak kılıf uzayabilir, vakumla aktif olarak kısalabilir veya herhangi bir yöne doğru bükülebilir. Tüm odalarda eşit basınç olduğunda kılıf uzar; basıncı simetrik olarak düşürmek kısalmasını sağlar; ve iki taraf arasında basınç farkı oluşturmak, kılıfı daha yumuşak, düşük basınçlı tarafa doğru eğdirir. Bu tek yapı böylece sert çerçeveler veya harici kısıtlama katmanları olmadan birden çok hareket türü sunar.
Nasıl titiz tasarım ve 3B baskı bunu mümkün kılıyor
Böylesi çok yönlü hareket elde etmek, kılıfın geometrisi ve malzemelerinin dikkatli ayarlanmasını gerektirdi. Araştırmacılar farklı duvar şekillerini ve destek stratejilerini karşılaştırdı ve esnek termoplastik poliüretandan yapılmış, boylamasına “bağ” katmanlarıyla güçlendirilmiş katlanmış körüğün güç ve esneklik açısından en iyi bileşimi sağladığını buldular. Kat genişliği, kat açısı, duvar kalınlığı ile bağ katmanların sayısı ve kalınlığı gibi özellikleri sistematik olarak değiştirdiler. Örneğin daha geniş katlar daha büyük uzamaya izin verirken, daha küçük kat açıları kuvvet üretimini iyileştiriyor fakat sertliği artırıyordu. Ayrıca daha yumuşak bir malzeme kullanmanın hem bükülme aralığını hem de strok mesafesini belirgin şekilde iyileştirdiğini keşfettiler. Bu karmaşık şekilleri güvenilir şekilde üretmek için ekip, Bowden tipi yazıcılarda esnek plastik için ayrıntılı bir 3B baskı tarifı geliştirdi; nem kontrolü, nozül tıkanması, desteklerin çıkarılması ve baskı sıcaklığı gibi zorluklara çözümler sundu. Bu süreç gaz geçirmez duvarlar ve büyük ölçekli imalata uygun tekrarlanabilir parçalar üretti.
Testler hareket ve güç hakkında ne gösteriyor
Hassas sensörler ve basınç düzenleyicilere sahip özel bir test platformu kullanarak yazarlar kılıfın ne kadar güçlü ve ne kadar uzağa itme, çekme ve bükme yapabildiğini ölçtüler. Birçok mevcut yumuşak aktüatörden daha düşük olan 130 kilopaskal gibi mütevazı bir basınçta kılıf, eklem hareketine anlamlı destek sağlayacak düzeyde, azami 60 newton aksiyal kuvvet üretti ve yaklaşık 81 milimetre kadar uzadı; ayrıca vakum altında 25 milimetre kadar kısalabildi. Bükülmede 45 dereceye kadar açıya ulaştı ve 18 newton bükme kuvveti üretti. Bu sonuçlar, genellikle daha yüksek basınçlara ihtiyaç duyan, daha küçük kuvvetler üreten ve aktif olarak kısalamayan diğer çok yönlü yumuşak aktüatörlerle karşılaştırıldığında elverişli. Ekip ayrıca 3B baskı yöntemlerinin çalışma tekrarı arasında neredeyse özdeş aktüatörler verdiğini ve geri beslemeli kontrol ile kılıfın hedef pozisyonları alt–milimetre doğrulukla izleyebildiğini ve düşük–orta hareket frekanslarında güvenilir yanıt verdiğini gösterdi.
Gelecekte giyilebilir robotlar için bunun anlamı
Uzman olmayan bir okuyucu için temel çıkarım şu: bu çalışma yumuşak, çevreleyen bir “kas kılıfı” fikrini pratik ve test edilmiş bir teknolojiye dönüştürüyor. İçsel akordeon körük tasarımını dikkatle tasarlanmış bir 3B baskı süreciyle birleştirerek araştırmacılar, nispeten düşük hava basıncında birkaç yöne bükülebilen, uzayan ve aktif olarak geri çekilebilen tek, hafif bir cihaz yarattılar. İçinin boş ve bir uzvu ya da eklemi çevreleyecek şekilde tasarlanmış olması, onu güvenli, konforlu ve kompakt olması gereken giyilebilir robotik eksternskaletler, tıbbi destekler ve rehabilitasyon cihazları için özellikle umut verici kılıyor. Gelecek çalışmalar kılıfın insan vücuduna uyumunu iyileştirecek, yerleşik algılama ve daha akıllı kontrol ekleyecek ve bunu bükme/çevirmeyi de içeren kılıflarla birleştirerek gündelik robotik yardım için daha da canlı, gövde‑benzeri hareketler yaratacak.
Atıf: Abboodi, M., Doumit, M. Design, manufacturing, and testing of a novel omnidirectional soft sleeve actuator. Sci Rep 16, 9828 (2026). https://doi.org/10.1038/s41598-026-40604-5
Anahtar kelimeler: yumuşak robotik, giyilebilir eksternskaletler, pnömatik aktüatörler, 3B baskılı TPU, destekleyici cihazlar