Clear Sky Science · zh
使用整数规划与 ALNS‑IP 优化具有水平与垂直动态的多层滑块式拼图存储系统
为什么更智能的存储对日常生活很重要
每一次当日达或到店自提订单的背后,都是一个争分夺秒寻找、拣选并发货的仓库。随着城市密度增加和网购激增,公司必须在不降低速度的前提下,在更小的空间里塞入更多货物。本文探讨了一种新型高密度仓库:类似三维滑块拼图的布局,以及一种决定其机器人如何移动的规划方法。收益是更快的取货、更少的机器人移动,以及能切实应对现代电商高峰的系统。
从通道与叉车到滑动拼图
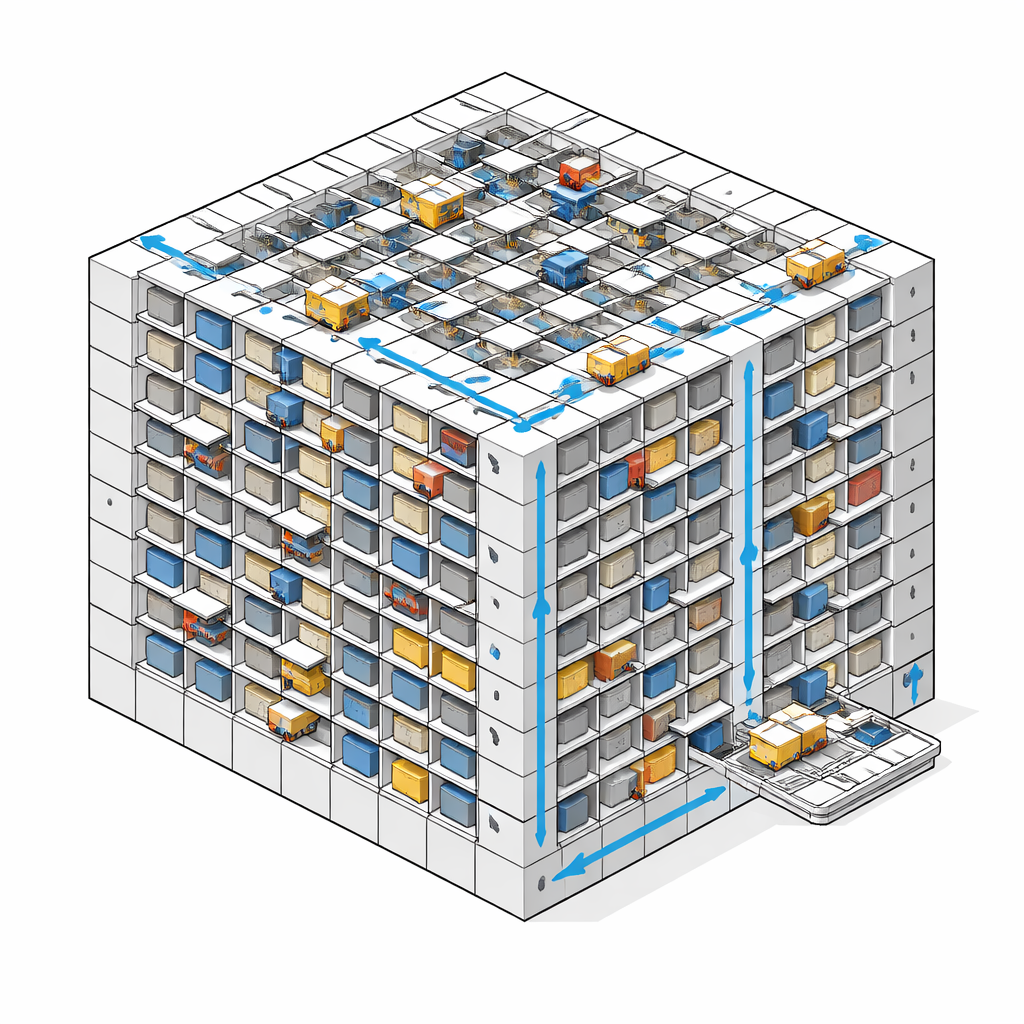
传统仓库将多达40%的地面留作固定通道,以便卡车或叉车在货架间通行。拼图式存储系统重新思考了这种布局。货物排列在紧密的网格中,与其让人或车辆行驶长距离,不如让货架围绕一个空的“护送”空间移动,类似经典的15块滑块拼图。此类无通道设计能够在相同占地内多存放30–50%的货物。本文在此基础上进一步构想,将拼图扩展为立方体:货架多层堆叠,自治滑块机器人既能横向移动货物,也能上下搬运。
补足缺失的第三维
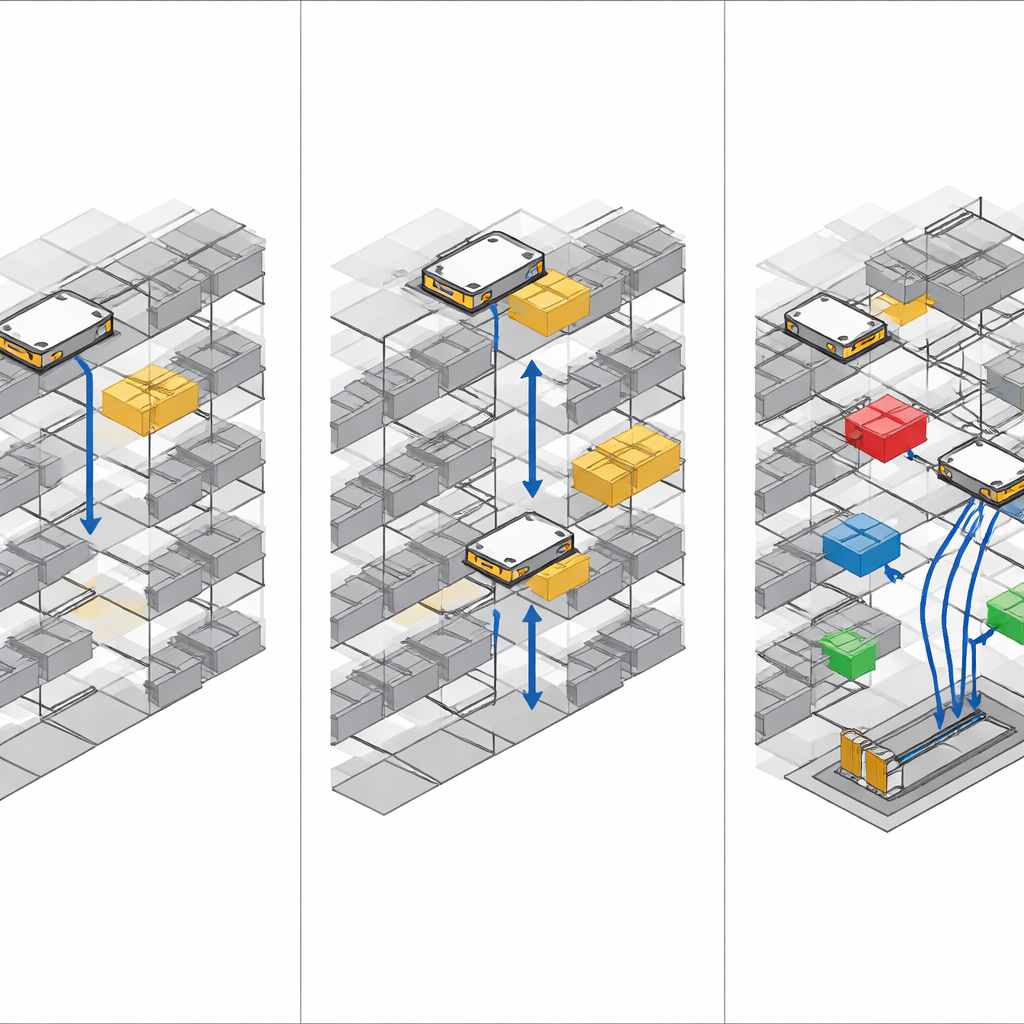
此前大多数研究将这些拼图式系统视为平面问题。物品沿南北东西方向滑动,而任何垂直运动——如升降——要么被单独处理,要么在优化中被忽视。然而现实仓库日益呈现三维迷宫的特征,机器人必须在所有方向上协同工作。作者指出这是一个关键空白:当前尚无数学模型能在完全三维的拼图网格中,同时优化允许滑块在六个方向移动并跨多层避免堵塞或碰撞的取货过程。他们提出了第一个这样的综合模型,目标是最小化将所有被请求物品送到单一出入口所需的个别移动总数。
将复杂仓库转化为方程
为捕捉仓库行为,研究者将其描述为空间位置的网格与一系列时间步。二元决策变量记录特定滑块或物品是否在某一时间从一个格子移动到相邻格子——横向或纵向。约束条件强制执行常识规则:任意时刻不能有两个滑块或物品占据同一格子;物品只有在被滑块载运时才能移动;流动必须从起点连续到终点;被请求的物品最终必须达到立方体角落的取货点。总体目标虽易于描述但难以计算:最小化所有滑块与物品合计的移动次数。由于该问题是若干运筹学中著名难题的推广,一旦仓库规模超过小型规模,精确求解便变得不可能。
混合搜索:把聪明猜测与精确检验结合起来
为驯服这种复杂性,作者设计了一种名为 ALNS‑IP 的混合启发式方法。它以一个贪婪方案开始,将每件目标物品分配给附近的滑块,然后将二者路线引向取货点。自适应大邻域搜索(ALNS)过程随后反复“破坏”这份方案的局部片段——通过从选定物品路径中移去一个或多个移动——再用一个强制所有物理规则的整数规划子模型对其“修复”。随着时间推移,算法会学习哪些类型的局部改动更可能产生更好结果并偏好这些改动。在不同规模的立方体仓库、存储密度、需求水平和滑块数量的广泛仿真测试中,该方法在小到中等规模问题上能找到接近最优的解;在更大问题中,即使精确求解器因内存或时间耗尽无法运行,仍能产出高质量的可行方案。
垂直运动真正带来的收益
一个关键问题是,让滑块既能垂直又能水平移动是否值得额外的工程投入。通过将完整三维模型与模拟旧有主要为水平设计的受限版本比较,作者表明,集成的垂直运动在小规模测试中平均可将所需移动次数降低超过10%,在某些布局中甚至可降至40%。这意味着物品能更快到达工作人员或打包站,机器人流量减少、拥堵机会减少。敏感性分析还显示,仅仅增加更多滑块并不总是有利——协调会变得更困难;而更高的需求自然会增加移动次数,但在所提框架内仍可控。
总体展望:迈向可行的三维机器人仓库
通俗地说,这项工作展示了如何在三维滑块拼图式仓库中编排小型机器人队伍,使它们只做必要且足够的移动来取回客户订单。详尽的数学描述与智能搜索算法的结合,将一个难解的规划问题转化为能足够快解决、可用于实际设计与运营决策的工具。随着城市仓库向上发展并愈加自动化,此类工具可帮助企业决定应购买多少机器人、如何布置存储网格,以及如何利用垂直空间而不拖慢取货速度。
引用: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
关键词: 自动化仓库, 拼图式存储, 滑块机器人, 整数规划, 启发式优化