Clear Sky Science · he
אופטימיזציה של מערכות אחסון חידות רב‑רמות מבוססות שאטלים עם דינמיקה אופקית ואנכית באמצעות תכנות שלם ו‑ALNS‑IP
מדוע אחסון חכם חשוב לחיי היומיום
מאחורי כל משלוח באותו יום וכל הזמנה לאיסוף ניצב מחסן המרוץ לאתר, לאסוף ולשלוח פריטים בתוך דקות. ככל שהערים צפופות יותר והקניות המקוונות מצטברות, חברות חייבות לדחוס יותר סחורה במרחב מוגבל מבלי להאט את הקצב. מאמר זה חוקר סוג חדש של מחסן צפוף שפועל כמו פאזל החלקים תלת‑ממדי, יחד עם שיטת תכנון שמחליטה כיצד רובוטים אלו אמורים לנוע. התוצאה היא אחזור מהיר יותר, פחות תנועות רובוטים, ומערכות שיכולות להתמודד באופן ריאלי עם העומס של המסחר האלקטרוני המודרני.
ממסלולים וממלאי דלק לפאזלים נעים
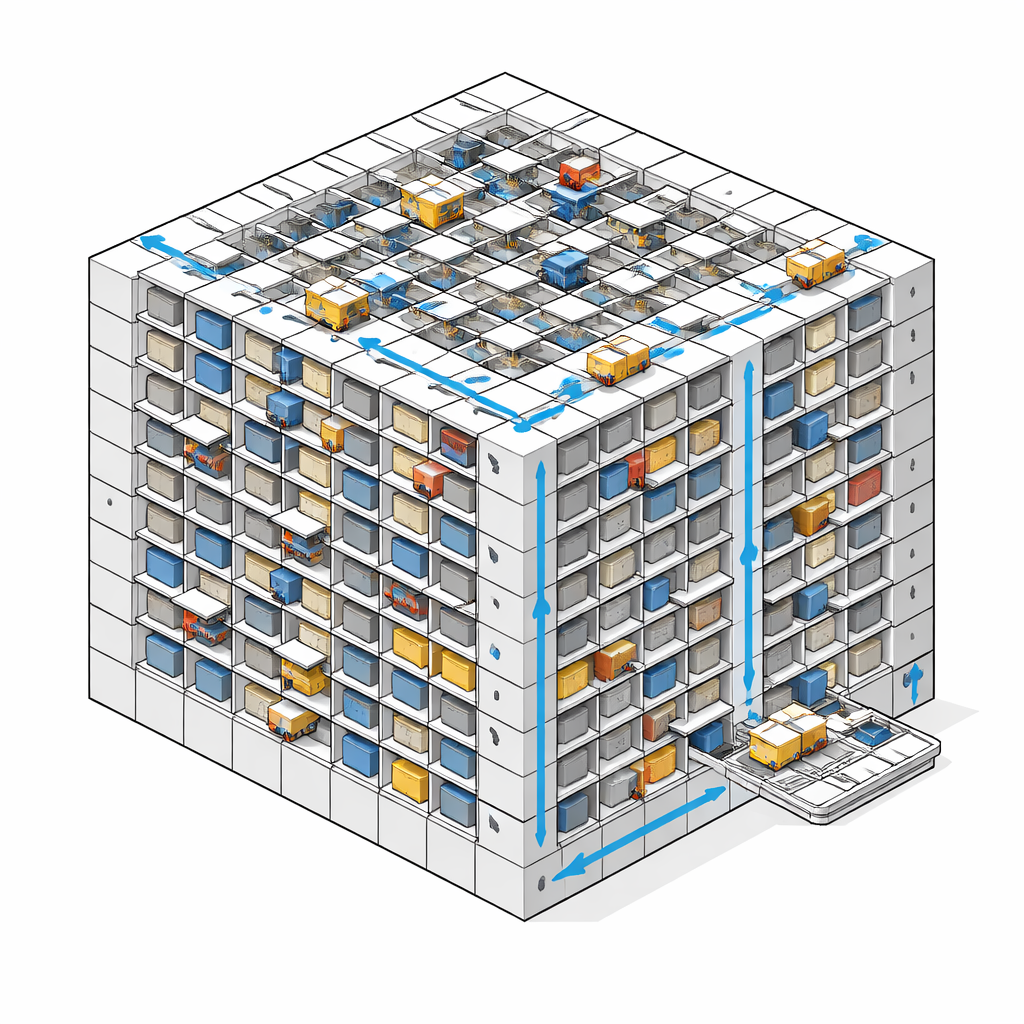
מחסנים מסורתיים מקדישים עד 40% משטח הרצפה למסלולים קבועים כדי שמכוניות או מלגזות יוכלו לנהוג בין המדפים. מערכות אחסון מבוססות חידות מתחשבות מחדש בתכנון זה. הסחורה נמצאת ברשת דחוסה, ובמקום שאנשים או כלי רכב יעברו מרחקים ארוכים, המדפים עצמם זזים סביב מרחב ריק "מלווה", בדומה לריבועי התנועה בפאזל ה‑15 הקלאסי. תכנון ללא מסלולים כזה יכול לאכלס 30–50% פריטים נוספים באותו שטח. המחקר מתבסס על רעיון זה ומדמיין חידה מורחבת לקובייה: מדפים מוערמים בכמה רמות, ושאטלים אוטונומיים מזיזים מטענים הן לצדדים והן מעלה־מטה.
הוספת הממד השלישי החסר
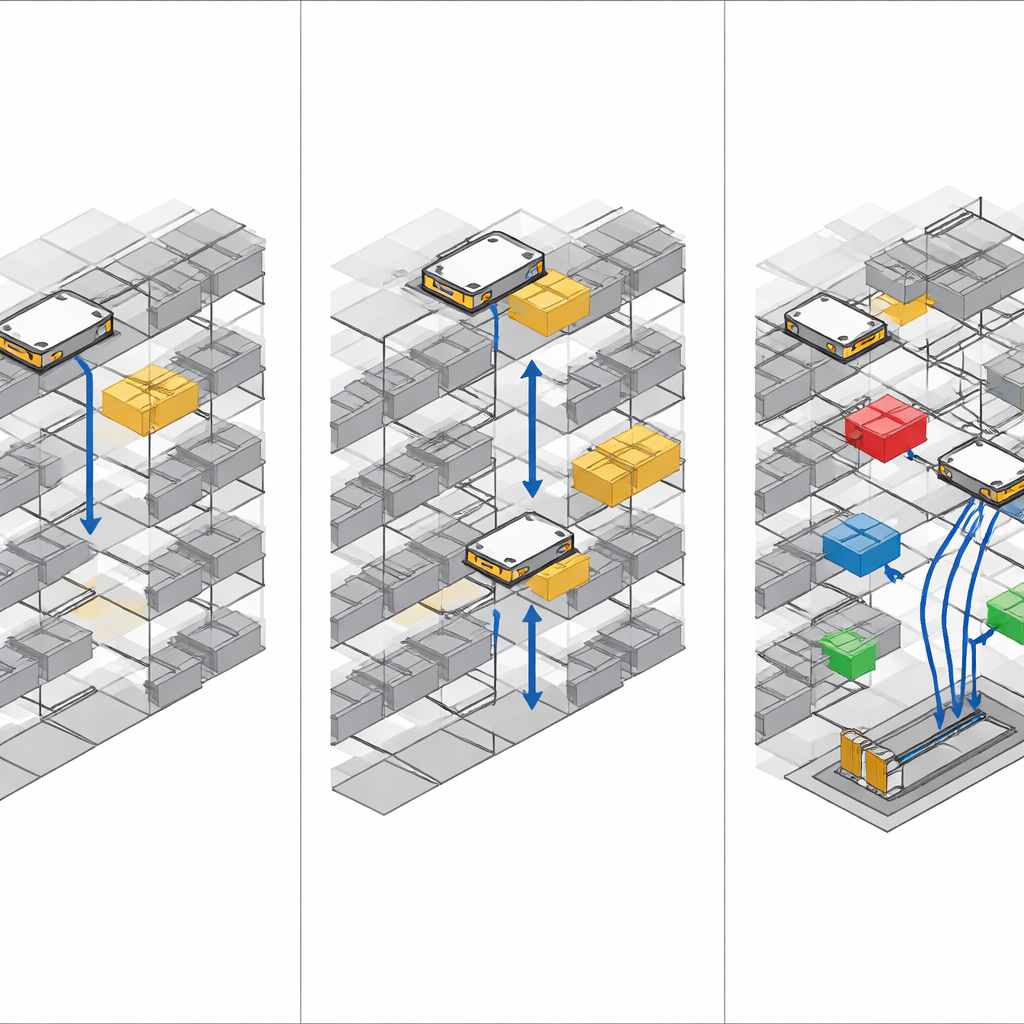
רוב המחקרים הקודמים התייחסו למערכות בסגנון חידה כשטוחות. פריטים זזו צפונה, דרומה, מזרחה או ממערב, בעוד שכל תנועה אנכית—כמו מעלית—טופלה בנפרד או הושמטה מהאופטימיזציה. מחסנים אמיתיים, עם זאת, נוטים יותר ויותר להיראות כמו מבוכים תלת‑ממדיים, והרובוטים שלהם חייבים לתאם תנועות בכל הכיוונים. המחברים מזהים פער קריטי זה: אין מודל מתמטי קיים שממקסם אחזור ברשת חידתית תלת‑ממדית מלאה שבה השאטלים יכולים לנוע בשש כיוונים וחייבים להימנע מחסימות או התנגשויות ביניהם בין רמות שונות. עבודתם מציגה את המודל המשולב הראשון מסוג זה, שמטרתו למזער את מספר התנועות האישיות הנדרש להבאת כל הפריטים המבוקשים לנקודת כניסה/יציאה יחידה.
הפיכת מחסן מורכב למשוואות
כדי ללכוד את התנהגות המחסן, החוקרים מתארים אותו כרשת של תאים במרחב וסדרה של שלבי זמן. משתני החלטה בינאריים רושמים האם שאטל או פריט מסוים זז מתא אחד לשכן—אופקית או אנכית—בזמן נתון. אילוצים מכריחים כללים שגרתיים: שני שאטלים או פריטים לא יכולים לתפוס את אותו תא בו‑בזמן; פריטים יכולים לזוז רק כשהם נשאים על ידי שאטלים; הזרימות חייבות להיות רציפות מתחילתן ועד סופן; והפריטים המבוקשים חייבים בסופו של דבר להגיע לנקודת האיסוף בפינת הקובייה. המטרה הכוללת פשוטה לנסח אך קשה לחישוב: למזער את סך כל התנועות של כל השאטלים והפריטים יחד. מאחר שבעיה זו מהווה הכללה של מספר בעיות ידועות וקשות במחקר התפעולי, פתרונה המדויק נעשה בלתי אפשרי ברגע שהמחסן גדל מעבר לגדלים צנועים.
חיפוש היברידי: שילוב ניחושים חכמים עם בדיקות מדויקות
כדי לרסן את המורכבות הזו, המחברים מעצבים היוריסטיקה היברידית בשם ALNS‑IP. היא מתחילה בתוכנית רעבתנית שמקצה כל פריט רצוי לשאטל קרוב ואז מובילה את שניהם לכיוון נקודת האיסוף. הליך Adaptive Large Neighborhood Search (ALNS) מפרק שוב ושוב חלקים קטנים מהתוכנית—על ידי הסרת תנועה אחת או יותר ממסלולי פריטים נבחרים—ומתקן אותם באמצעות תת‑מודל של תכנות שלם שמכפה את כל הכללים הפיזיים. עם הזמן האלגוריתם לומד אילו סוגי שינויים מקומיים נוטים להניב תוצאות טובות ומועדף עליהם. בדיקות נרחבות על מחסנים מדומים בצורת קובייה בגדלים שונים, בצפיפויות אחסון שונות, ברמות ביקוש שונות ומספרי שאטלים משתנים מראות שהגישה מוצאת פתרונות קרובים מאוד לאופטימום במקרים קטנים ובינוניים, ותוכניות ישימות באיכות גבוהה גם כשמפצחים מדויקים נגמרים להם זיכרון או זמן על מקרים גדולים יותר.
מה תנועה אנכית באמת נותנת לכם
שאלה מרכזית היא האם מתן אפשרות לשאטלים לנוע אנכית בנוסף לתנועה אופקית באמת שווה את המורכבות ההנדסית הנוספת. בהשוואה בין המודל התלת‑ממדי המלא לגרסה מוגבלת שמדמה עיצובים קודמים, בעיקר אופקיים, המחברים מראים שתנועה אנכית משולבת יכולה לקצץ את מספר התנועות הנדרש ביותר מ‑10% בממוצע במקרים קטנים, ועד כ‑40% בחלק מהתצורות. משמעות הדבר היא שהפריטים מגיעים לעובדים או לתחנות האריזה מהר יותר, עם פחות תנועות רובוטים ופחות סיכויים לצפיפות. ניתוחי רגישות מגלים גם שהוספת שאטלים נוספים לא תמיד מסייעת—הקוארדינציה נעשית מסובכת יותר—בעוד שביקוש גבוה יותר מגדיל באופן טבעי את מספר התנועות אך נשאר בר־ניהול במסגרת המוצעת.
התמונה הגדולה: לעבר מחסנים רובוטיים תלת‑ממדיים מעשיים
במילים פשוטות, עבודה זו מראה כיצד לרקוד פליגת רובוטים קטנים במחסן חידתי תלת‑ממדי כך שהם יבצעו בדיוק את התנועות הדרושות—ולא יותר—כדי להביא את מה שהלקוחות מזמינים. השילוב של תיאור מתמטי מפורט ואלגוריתם חיפוש חכם הופך בעיית תכנון בלתי ניתנת לפתירה למשהו שניתן לפתור במהירות מספקת להחלטות עיצוב ותפעול ממשיות. ככל שמחסנים עירוניים נעשים גבוהים ומאוגננים יותר, כלים כאלה עשויים לעזור לחברות להחליט כמה רובוטים לקנות, כיצד לפרוס את רשתות האחסון שלהן ואיך לנצל את המרחב האנכי מבלי להאט את מהירות האחזור.
ציטוט: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
מילות מפתח: מחסן אוטומטי, אחסון מבוסס חידות, שאטלים רובוטיים, תכנות שלם, אופטימיזציה היוריסטית