Clear Sky Science · sv
Optimera flernivå‑lagersystem baserade på shuttle‑pussel med horisontell och vertikal dynamik med heltalsprogrammering och ALNS‑IP
Varför smartare lagring spelar roll i vardagen
Bakom varje leverans samma dag och varje click‑and‑collect‑order ligger ett lager som tävlar om att hitta, plocka och skicka artiklar på några minuter. När städer blir tätare och näthandeln ökar måste företag trycka in fler varor på mindre yta utan att tappa i tempo. Denna artikel undersöker en ny typ av högdensitetslager som fungerar som ett tredimensionellt slide‑pussel, och en planeringsmetod som bestämmer hur dess robotar ska röra sig. Vinsterna är snabbare uthämtning, färre robotrörelser och system som realistiskt kan hantera trycket från modern e‑handel.
Från gångar och truckar till slide‑pussel
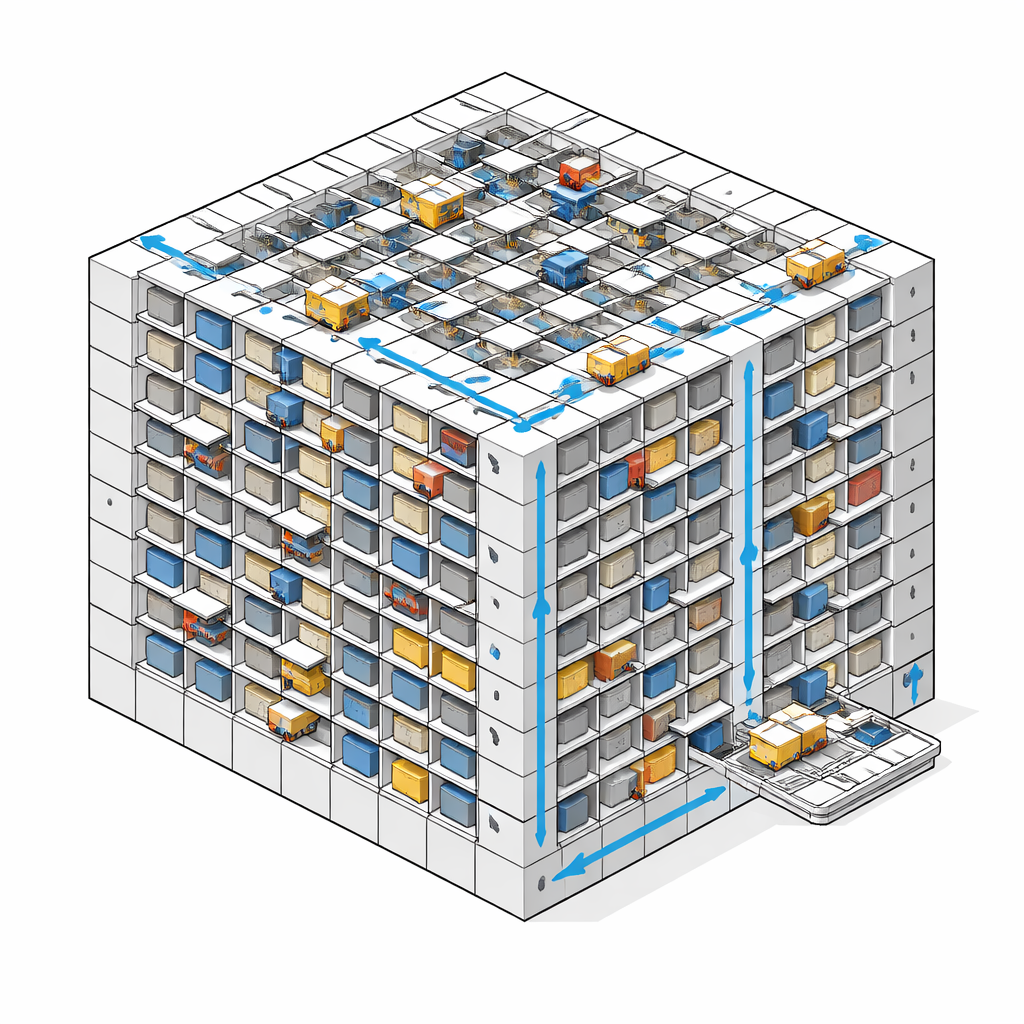
Konventionella lager ägnar upp till 40 % av golvytan åt fasta gångar så att truckar kan köra mellan hyllorna. Pusselbaserade lagringssystem omprövar denna layout. Varor står i ett tätt rutnät, och i stället för att människor eller fordon reser långa sträckor, flyttar hyllorna sig själva kring ett tomt "escort"‑utrymme, ungefär som brickorna i det klassiska 15‑pusslet. Denna gångfri design kan packa 30–50 % fler artiklar på samma yta. Studien bygger på idén och föreställer sig ett sådant pussel utvidgat till en kub: ställage staplade i flera nivåer, med autonoma shuttle‑robotar som flyttar laster både åt sidan och upp eller ner.
Lägga till den saknade tredje dimensionen
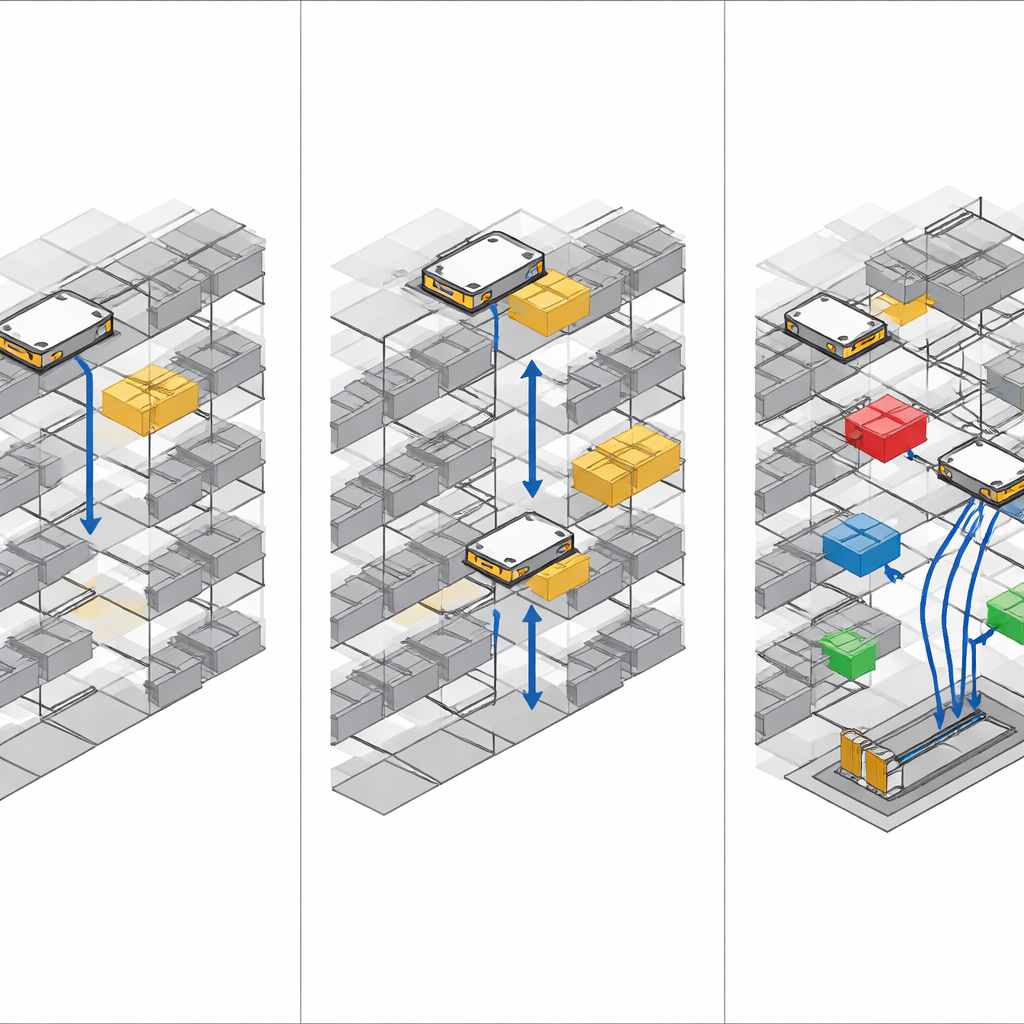
De flesta tidigare studier behandlade dessa pusselstilade system som plana. Objekt sköts norr, söder, öst eller väst, medan eventuell vertikal rörelse—som en hiss—hanterades separat eller ignorerades i optimeringen. Verkliga lager ser dock i allt högre grad ut som tredimensionella labyrinter, och deras robotar måste samordna rörelser i alla riktningar. Författarna identifierar detta som en kritisk lucka: det finns inget existerande matematiskt modell som optimerar uthämtning i ett fullt 3D pusselrutnät där shuttlar kan röra sig i sex riktningar och måste undvika att blockera eller kollidera med varandra över flera nivåer. Deras arbete introducerar den första sådana integrerade modellen, med målet att minimera antalet individuella rörelser som krävs för att föra alla efterfrågade artiklar till en enda in‑/utgångspunkt.
Göra ett komplext lager till ekvationer
För att fånga lagrets beteende beskriver forskarna det som ett rutnät av positioner i rummet och en följd tidssteg. Binära beslutvariabler registrerar huruvida en viss shuttle eller artikel rör sig från en cell till en intilliggande cell—horisontellt eller vertikalt—vid en given tidpunkt. Restriktioner upprätthåller sunt förnuft: inga två shuttlar eller artiklar kan ockupera samma cell samtidigt; artiklar kan bara flyttas när de bärs av shuttlar; flöden måste vara kontinuerliga från start till mål; och efterfrågade artiklar måste slutligen nå upphämtningspunkten i kubens hörn. Det övergripande målet är enkelt att formulera men svårt att beräkna: minimera totalt antal rörelser för alla shuttlar och artiklar sammanlagt. Eftersom detta problem generaliserar flera välkända svåra problem inom operations research blir exakt lösning omöjlig redan när lagret överstiger blygsam storlek.
Hybrid sökning: blanda smarta gissningar med exakta kontroller
För att tygla denna komplexitet har författarna utformat en hybridheuristik kallad ALNS‑IP. Den börjar med en girig plan som tilldelar varje önskad artikel en närliggande shuttle och sedan dirigerar båda mot upphämtningspunkten. En adaptiv large neighborhood search (ALNS)‑procedur "förstör" upprepade gånger små delar av denna plan—genom att ta bort ett eller flera flytt från valda artikelvägar—och "reparerar" dem med en heltalsprogrammerings‑delmodell som upprätthåller alla fysiska regler. Med tiden lär sig algoritmen vilka typer av lokala ändringar som tenderar att ge bättre resultat och favoriserar dem. Omfattande tester på simulerade kubformade lager i olika storlekar, lagringstätheter, efterfrågenivåer och shuttle‑antal visar att detta angreppssätt finner lösningar mycket nära de optimala i små och medelstora fall, och högkvalitativa genomförbara planer även när exakta lösare får slut på minne eller tid i större fall.
Vad vertikal rörelse verkligen ger
En central fråga är om det är värt den extra konstruktionen att låta shuttlar röra sig vertikalt såväl som horisontellt. Genom att jämföra deras fulla 3D‑modell med en begränsad version som efterliknar äldre, mestadels horisontella design, visar författarna att integrerad vertikal rörelse kan minska antalet nödvändiga rörelser med mer än 10 % i genomsnitt i små testfall, och med upp till 40 % i vissa layouter. Det betyder att artiklar når arbetare eller packstationer snabbare, med mindre robottrafik och färre tillfällen för trängsel. Känslighetsanalyser visar också att det inte alltid hjälper att bara lägga till fler shuttlar—samordningen blir svårare—medan högre efterfrågan naturligtvis ökar antalet rörelser men förblir hanterbart inom det föreslagna ramverket.
Större bild: mot praktiska 3D‑robotlager
Enkelt uttryckt visar detta arbete hur man koreograferar flottor av små robotar i ett tredimensionellt sliding‑pussel‑lager så att de bara gör precis så mycket rörelse, och inte mer, som krävs för att hämta kundernas beställningar. Kombinationen av en detaljerad matematisk beskrivning och en smart sökalogoritm förvandlar ett oöverstigligt planeringsproblem till något som kan lösas tillräckligt snabbt för verkliga design‑ och driftbeslut. När urbana lager blir högre och mer automatiserade kan sådana verktyg hjälpa företag att avgöra hur många robotar de ska köpa, hur de ska utforma sina lagerrutnät och hur de kan utnyttja vertikal yta utan att bromsa uthämtningshastigheten.
Citering: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
Nyckelord: automatiserat lager, pusselbaserad lagring, shuttle‑robotar, heltalsprogrammering, heuristisk optimering