Clear Sky Science · fr
Optimisation des systèmes de stockage à navettes multi‑niveaux basés sur un puzzle avec dynamique horizontale et verticale utilisant la programmation entière et ALNS‑IP
Pourquoi un stockage plus intelligent compte au quotidien
Derrière chaque livraison le jour même et chaque commande en clic‑et‑retrait se cache un entrepôt qui court contre la montre pour localiser, prélever et expédier des articles en quelques minutes. À mesure que les villes se densifient et que le commerce en ligne explose, les entreprises doivent entasser davantage de marchandises sur moins d’espace sans ralentir le service. Cet article examine un nouveau type d’entrepôt haute densité qui fonctionne comme un puzzle coulissant en 3D, ainsi qu’une méthode de planification qui décide des déplacements de ses robots. Le gain : des récupérations plus rapides, moins de déplacements de robots et des systèmes capables de gérer concrètement l’afflux du commerce électronique moderne.
Des allées et chariots élévateurs au puzzle coulissant
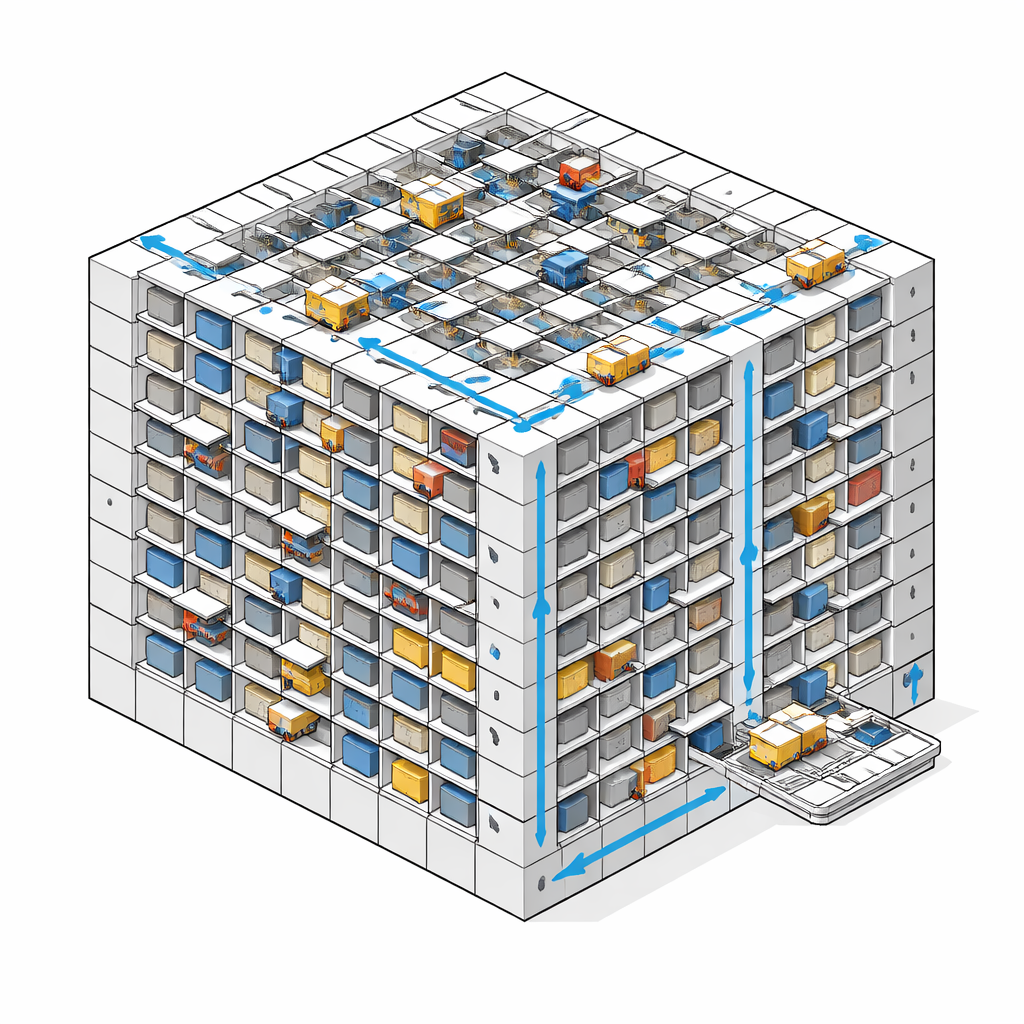
Les entrepôts conventionnels consacrent jusqu’à 40 % de leur surface à des allées fixes pour que camions ou chariots élévateurs circulent entre les rayonnages. Les systèmes de stockage basés sur un puzzle repensent cette configuration. Les marchandises sont placées dans une grille dense et, au lieu de faire parcourir de longues distances à des personnes ou des véhicules, ce sont les rayonnages qui se déplacent autour d’un espace vide « d’escorte », à la manière des tuiles du classique puzzle coulissant à 15 pièces. Ce design sans allées peut loger 30 à 50 % d’articles en plus sur la même surface. L’étude s’appuie sur cette idée et imagine le puzzle étendu en cube : des rayonnages empilés sur plusieurs niveaux, avec des navettes autonomes déplaçant les charges latéralement et verticalement.
Ajouter la troisième dimension manquante
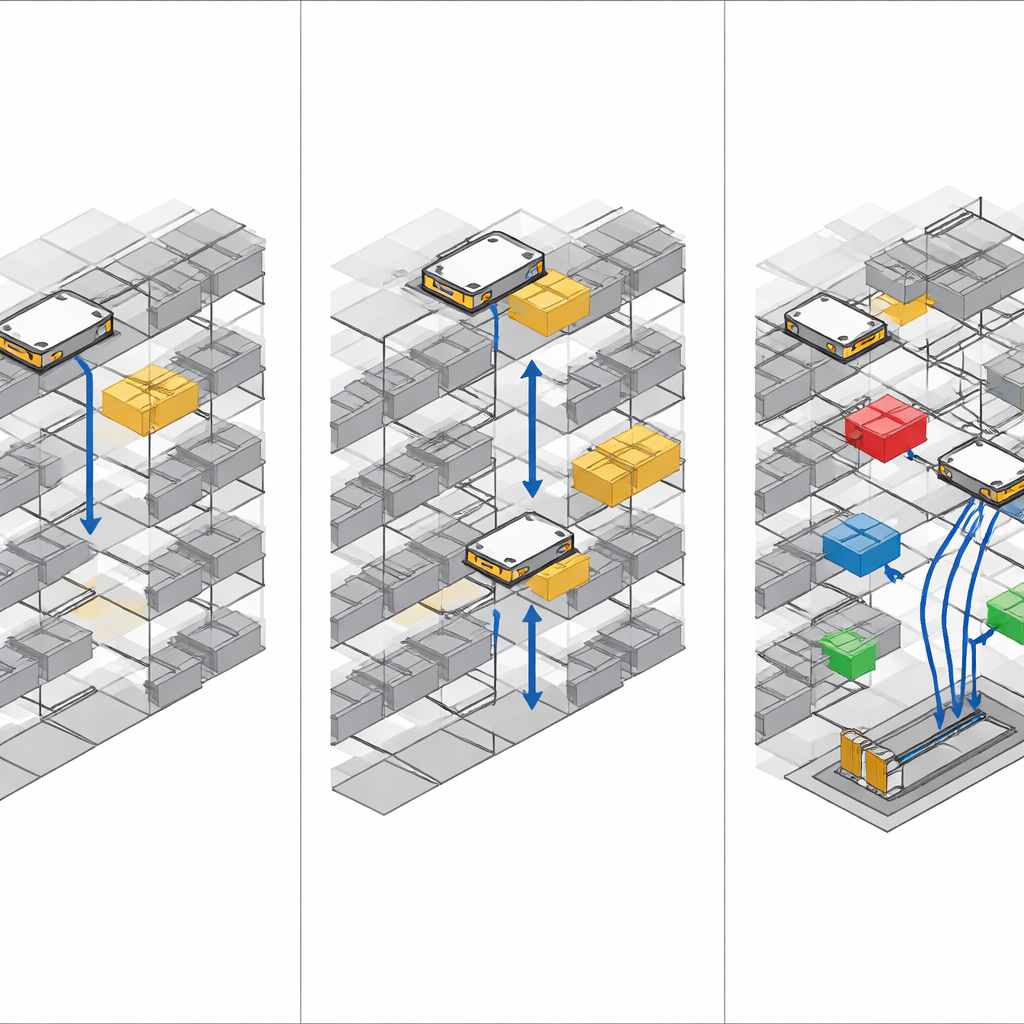
La plupart des travaux antérieurs traitaient ces systèmes en style puzzle comme plats. Les objets glissaient au nord, sud, est ou ouest, tandis que tout mouvement vertical — comme un ascenseur — était géré séparément ou ignoré dans l’optimisation. Les entrepôts réels ressemblent toutefois de plus en plus à des labyrinthes tridimensionnels, et leurs robots doivent se coordonner dans toutes les directions. Les auteurs identifient cela comme une lacune critique : aucun modèle mathématique existant n’optimise la récupération dans une grille puzzle pleinement 3D où les navettes peuvent se déplacer dans six directions et doivent éviter de se bloquer ou de se percuter à travers plusieurs niveaux. Leur travail introduit le premier modèle intégré de ce type, visant à minimiser le nombre total de mouvements nécessaires pour amener tous les articles demandés vers un point d’entrée/sortie unique.
Transformer un entrepôt complexe en équations
Pour représenter le comportement de l’entrepôt, les chercheurs le décrivent comme une grille de positions dans l’espace et une série d’instants temporels. Des variables décisionnelles binaires enregistrent si une navette ou un article donné se déplace d’une cellule vers une cellule voisine — horizontalement ou verticalement — à un instant donné. Des contraintes imposent des règles de bon sens : deux navettes ou articles ne peuvent pas occuper la même cellule simultanément ; les articles ne peuvent être déplacés que lorsqu’ils sont portés par des navettes ; les flux doivent être continus du début à la fin ; et les articles demandés doivent finalement atteindre le point de prise situé dans un coin du cube. L’objectif global est simple à énoncer mais difficile à calculer : minimiser le nombre total de déplacements pour l’ensemble des navettes et des articles. Parce que ce problème généralise plusieurs problèmes notoirement difficiles en recherche opérationnelle, le résoudre exactement devient impossible dès que l’entrepôt dépasse une taille modeste.
Recherche hybride : mêler hypothèses intelligentes et vérifications exactes
Pour maîtriser cette complexité, les auteurs conçoivent une heuristique hybride appelée ALNS‑IP. Elle commence par un plan glouton qui assigne chaque article souhaité à une navette proche puis achemine les deux vers le point de prise. Une procédure de recherche à grand voisinage adaptatif (ALNS) « détruit » ensuite de façon répétée de petites parties de ce plan — en supprimant un ou plusieurs déplacements dans des trajectoires d’articles sélectionnés — et les « répare » à l’aide d’un sous‑modèle de programmation entière qui applique toutes les règles physiques. Au fil du temps, l’algorithme apprend quels types de modifications locales tendent à produire de meilleurs résultats et les privilégie. Des tests étendus sur des entrepôts cubiques simulés de différentes tailles, densités de stockage, niveaux de demande et nombres de navettes montrent que cette approche trouve des solutions très proches de l’optimal sur des cas petits et moyens, et des plans réalisables de haute qualité même lorsque les solveurs exacts manquent de mémoire ou de temps pour les cas plus grands.
Ce que le mouvement vertical apporte vraiment
La question clé est de savoir si permettre aux navettes de se déplacer verticalement en plus d’horizontalement vaut réellement les coûts d’ingénierie supplémentaires. En comparant leur modèle 3D complet avec une version restreinte qui imite les conceptions antérieures surtout horizontales, les auteurs montrent que le mouvement vertical intégré peut réduire le nombre de déplacements requis de plus de 10 % en moyenne sur les petits cas test, et jusqu’à 40 % dans certaines configurations. Cela signifie que les articles atteignent plus rapidement les opérateurs ou les postes d’emballage, avec moins de trafic robotique et moins de risques de congestion. Des analyses de sensibilité révèlent également que l’ajout pur et simple de navettes ne suffit pas toujours — la coordination devient plus difficile — tandis qu’une demande plus élevée augmente naturellement le nombre de déplacements mais reste gérable dans le cadre proposé.
Perspective générale : vers des entrepôts robotisés 3D pratiques
En termes simples, ce travail montre comment chorégraphier des flottes de petits robots dans un entrepôt puzzle coulissant tridimensionnel afin qu’ils effectuent juste les mouvements nécessaires — ni plus, ni moins — pour aller chercher les commandes des clients. La combinaison d’une description mathématique détaillée et d’un algorithme de recherche intelligent transforme un problème de planification inabordable en quelque chose de suffisamment rapide pour guider les décisions de conception et d’exploitation. À mesure que les entrepôts urbains montent en hauteur et se robotisent, de tels outils pourraient aider les entreprises à décider combien de robots acheter, comment agencer leurs grilles de stockage et comment exploiter l’espace vertical sans ralentir la vitesse de prélèvement.
Citation: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
Mots-clés: entrepôt automatisé, stockage basé sur un puzzle, robots navette, programmation entière, optimisation heuristique