Clear Sky Science · it
Ottimizzazione di sistemi di stoccaggio a più livelli basati su puzzle con dinamiche orizzontali e verticali usando programmazione intera e ALNS‑IP
Perché uno stoccaggio più intelligente conta nella vita quotidiana
Dietro ogni consegna in giornata e ogni ordine click‑and‑collect c’è un magazzino che corre per trovare, prelevare e spedire articoli in pochi minuti. Con l’aumento della densità urbana e l’exploit degli acquisti online, le aziende devono infilare più merce in spazi sempre più ridotti senza rallentare. Questo articolo esplora un nuovo tipo di magazzino ad alta densità che funziona come un rompicapo tridimensionale e un metodo di pianificazione che decide come i suoi robot debbano muoversi. Il risultato è un recupero più rapido, meno movimenti dei robot e sistemi in grado di gestire realisticamente la pressione dell’e‑commerce moderno.
Dai corridoi e carrelli elevatori ai puzzle a scorrimento
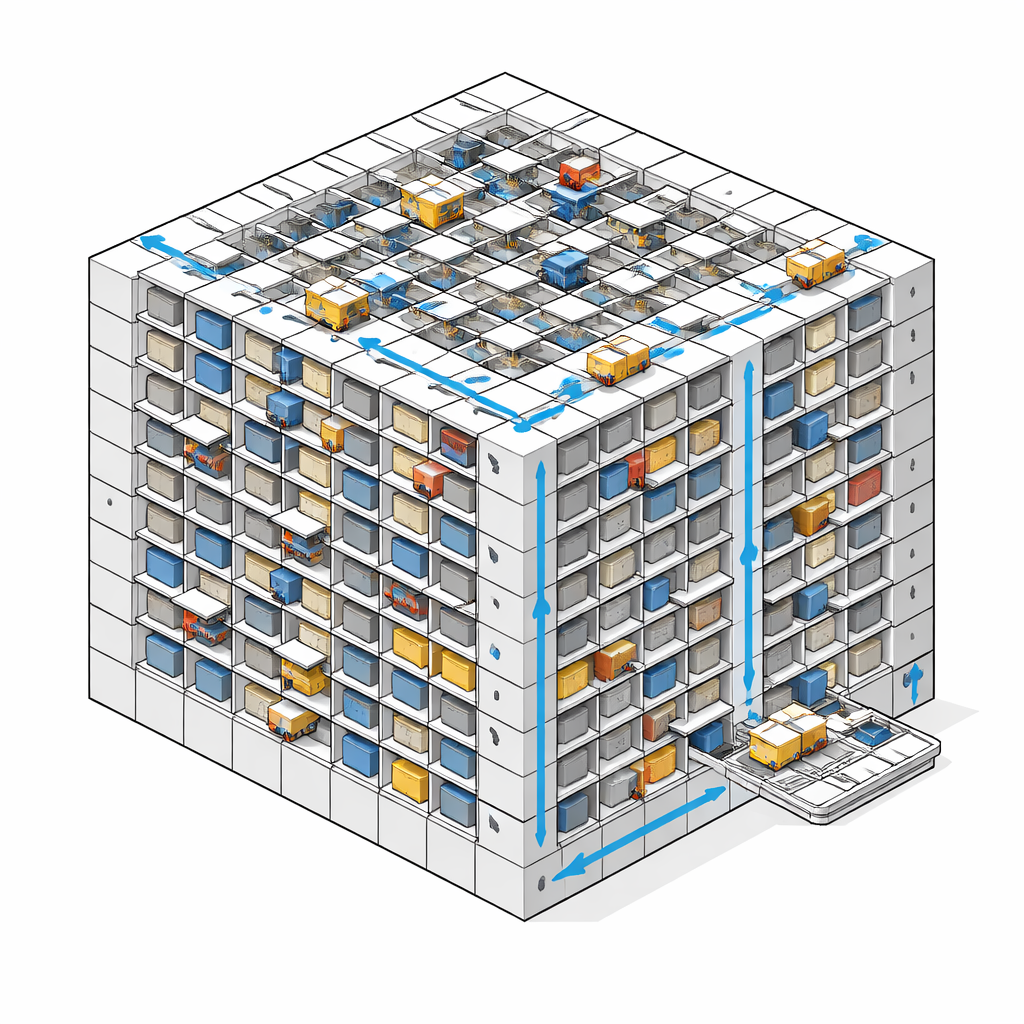
I magazzini convenzionali dedicano fino al 40% della superficie a corsie fisse per permettere a camion o carrelli elevatori di muoversi fra gli scaffali. I sistemi di stoccaggio basati su puzzle ripensano questa disposizione. Le merci sono collocate in una griglia compatta e, invece di far percorrere lunghe distanze a persone o veicoli, sono gli stessi scaffali a spostarsi intorno a uno spazio vuoto di “scorta”, proprio come le tessere nel classico puzzle a scorrimento da 15 pezzi. Questo design senza corsie può concentrare il 30–50% in più di articoli nello stesso ingombro. Lo studio si basa su questa idea e immagina il puzzle esteso in un cubo: scaffalature impilate su più livelli, con shuttle autonomi che muovono i carichi sia lateralmente sia in verticale.
Aggiungere la terza dimensione mancante
La maggior parte delle ricerche precedenti trattava questi sistemi a puzzle come piani bidimensionali. Gli oggetti scivolavano a nord, sud, est o ovest, mentre qualsiasi movimento verticale — come un sollevatore — veniva gestito separatamente o ignorato nell’ottimizzazione. I magazzini reali, tuttavia, assomigliano sempre più a labirinti tridimensionali e i loro robot devono coordinarsi in tutte le direzioni. Gli autori individuano questa lacuna critica: non esiste un modello matematico che ottimizzi il prelievo in una griglia puzzle completamente 3D dove gli shuttle possono muoversi in sei direzioni e devono evitare di ostruirsi o collidere su più livelli. Il loro lavoro introduce il primo modello integrato di questo tipo, con l’obiettivo di minimizzare il numero di singoli movimenti necessari per portare tutti gli articoli richiesti a un unico punto di ingresso/uscita.
Trasformare un magazzino complesso in equazioni
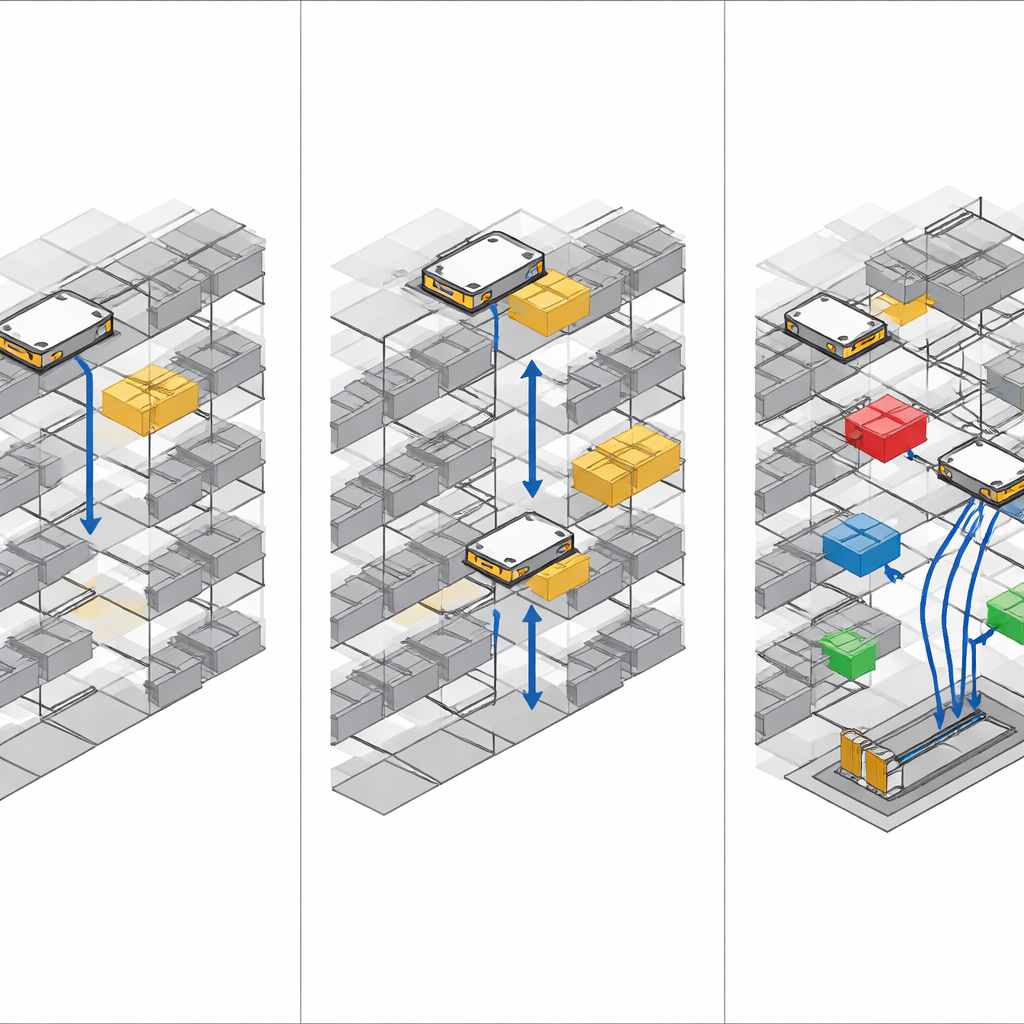
Per descrivere il comportamento del magazzino, i ricercatori lo rappresentano come una griglia di posizioni nello spazio e una successione di passaggi temporali. Variabili binarie decisionali registrano se un particolare shuttle o articolo si sposta da una cella a una cella adiacente — orizzontalmente o verticalmente — in un dato istante. I vincoli impongono regole di buon senso: nessuno shuttle o articolo può occupare la stessa cella contemporaneamente; gli articoli possono muoversi solo se trasportati dagli shuttle; i flussi devono essere continui dall’inizio alla fine; e gli articoli richiesti devono infine arrivare al punto di ritiro nell’angolo del cubo. L’obiettivo complessivo è semplice da enunciare ma difficile da calcolare: minimizzare il numero totale di movimenti di shuttle e articoli combinati. Poiché questo problema generalizza diversi noti problemi difficili della ricerca operativa, risolverlo esattamente diventa impossibile non appena il magazzino cresce oltre dimensioni modeste.
Ricerca ibrida: mixare ipotesi intelligenti e verifiche esatte
Per domare questa complessità, gli autori progettano un euristico ibrido chiamato ALNS‑IP. Parte da un piano goloso che assegna a ciascun articolo desiderato uno shuttle vicino e poi instrada entrambi verso il punto di ritiro. Una procedura di ricerca a grandi vicinati adattiva (ALNS) ripetutamente “distrugge” piccole parti di questo piano — rimuovendo uno o più movimenti da percorsi di articoli selezionati — e le “ripara” usando un sotto‑modello di programmazione intera che fa rispettare tutte le regole fisiche. Col tempo, l’algoritmo impara quali tipi di modifiche locali tendono a produrre risultati migliori e le favorisce. Test estesi su magazzini simulati a forma di cubo di diverse dimensioni, densità di stoccaggio, livelli di domanda e numero di shuttle dimostrano che questo approccio trova soluzioni molto vicine all’ottimo nei casi piccoli e medi e piani fattibili di alta qualità anche quando i solver esatti esauriscono memoria o tempo sui casi più grandi.
Cosa guadagna davvero il movimento verticale
Una domanda centrale è se permettere agli shuttle di muoversi verticalmente oltre che orizzontalmente valga effettivamente l’onere ingegneristico aggiuntivo. Confrontando il loro modello 3D completo con una versione limitata che imita i design più vecchi e in gran parte orizzontali, gli autori mostrano che il moto verticale integrato può ridurre il numero di movimenti necessari di oltre il 10% in media nei casi di test piccoli e fino al 40% in alcuni layout. Ciò significa che gli articoli raggiungono i lavoratori o le postazioni di imballaggio più rapidamente, con meno traffico robotico e minori rischi di congestione. Le analisi di sensitività rivelano inoltre che aggiungere semplicemente più shuttle non sempre aiuta — la coordinazione si complica — mentre una domanda più elevata aumenta naturalmente il numero di movimenti ma resta gestibile nel quadro proposto.
Quadro generale: verso magazzini robotizzati 3D pratici
In termini semplici, questo lavoro mostra come coreografare flotte di piccoli robot in un magazzino a puzzle tridimensionale in modo che si muovano il giusto necessario, e non di più, per recuperare quanto ordinato dai clienti. La combinazione di una descrizione matematica dettagliata e di un algoritmo di ricerca intelligente trasforma un problema di pianificazione intrattabile in qualcosa che può essere risolto abbastanza rapidamente da supportare decisioni reali di progetto e gestione operativa. Con i magazzini urbani che diventano più alti e più automatizzati, tali strumenti potrebbero aiutare le aziende a decidere quanti robot acquistare, come progettare le griglie di stoccaggio e come sfruttare lo spazio verticale senza compromettere la velocità di prelievo.
Citazione: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
Parole chiave: magazzino automatizzato, stoccaggio basato su puzzle, robot shuttle, programmazione intera, ottimizzazione euristica