Clear Sky Science · es
Optimización de sistemas de almacenamiento tipo rompecabezas con lanzaderas multinivel y dinámica horizontal y vertical mediante programación entera y ALNS-IP
Por qué un almacenamiento más inteligente importa en la vida cotidiana
Detrás de cada entrega el mismo día y de cada pedido para recoger en tienda hay un almacén que compite por encontrar, preparar y enviar artículos en minutos. A medida que las ciudades se densifican y el comercio electrónico se dispara, las empresas deben encajar más mercancías en menos espacio sin ralentizarse. Este artículo explora un nuevo tipo de almacén de alta densidad que funciona como un rompecabezas deslizante en 3D, junto con un método de planificación que decide cómo deben moverse sus robots. El beneficio es una recuperación más rápida, menos desplazamientos de robots y sistemas que pueden manejar de forma realista la presión del comercio electrónico moderno.
De pasillos y carretillas a rompecabezas deslizantes
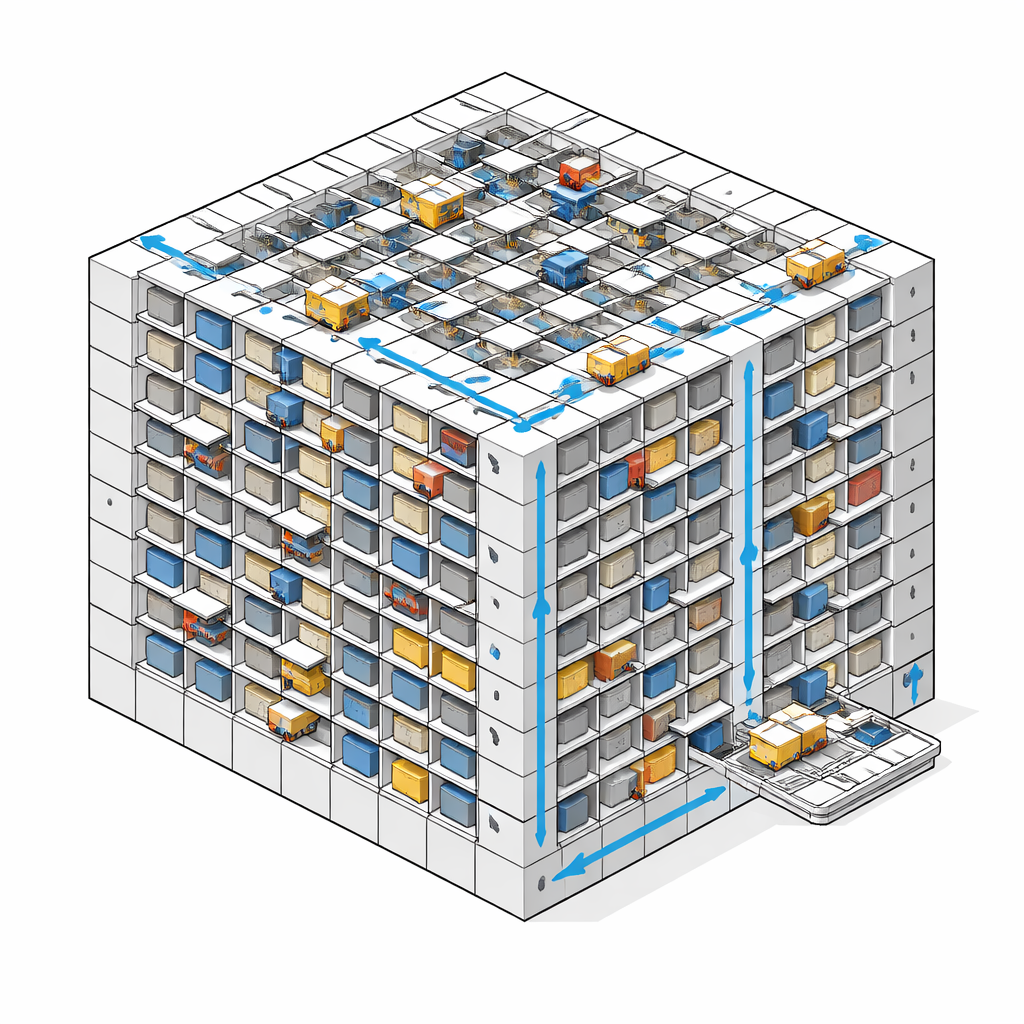
Los almacenes convencionales dedican hasta un 40 % de su superficie a pasillos fijos para que camiones o carretillas puedan circular entre estanterías. Los sistemas de almacenamiento tipo rompecabezas replantean esta disposición. Las mercancías se colocan en una rejilla compacta y, en lugar de que personas o vehículos recorran largas distancias, las propias estanterías se desplazan alrededor de un espacio vacío de “acompañamiento”, muy parecido a las piezas del clásico rompecabezas deslizante de 15. Este diseño sin pasillos puede almacenar entre un 30 % y un 50 % más de artículos en la misma huella. El estudio parte de esta idea e imagina el rompecabezas extendido en un cubo: estanterías apiladas en varios niveles, con robots lanzadera autónomos que mueven cargas tanto en horizontal como en vertical.
Añadiendo la tercera dimensión que faltaba
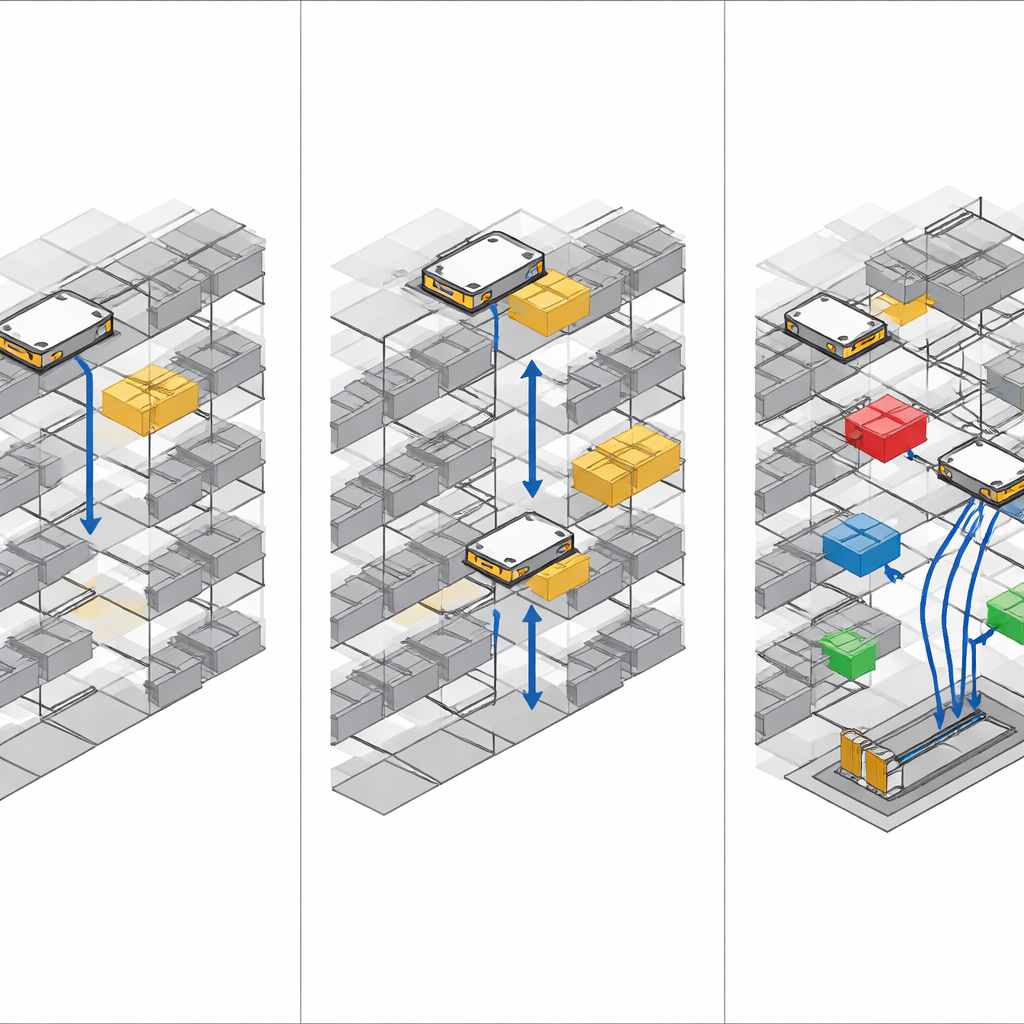
La mayoría de investigaciones anteriores trató estos sistemas tipo rompecabezas como si fueran planos. Los artículos se deslizaban al norte, sur, este u oeste, mientras que cualquier movimiento vertical —como un elevador— se manejaba por separado o se ignoraba en la optimización. Sin embargo, los almacenes reales se parecen cada vez más a laberintos tridimensionales y sus robots deben coordinarse en todas las direcciones. Los autores identifican esto como una laguna crítica: no existía hasta ahora un modelo matemático que optimizase la recuperación en una rejilla de rompecabezas totalmente 3D donde las lanzaderas pueden moverse en seis direcciones y deben evitar bloquearse o colisionar entre niveles. Su trabajo introduce el primer modelo integrado de este tipo, con el objetivo de minimizar cuántos movimientos individuales son necesarios para llevar todos los artículos solicitados a un único punto de entrada/salida.
Transformar un almacén complejo en ecuaciones
Para captar el comportamiento del almacén, los investigadores lo describen como una rejilla de posiciones en el espacio y una serie de pasos temporales. Variables de decisión binarias registran si una lanzadera o un artículo concreto se mueve de una celda a una celda vecina —horizontal o verticalmente— en un tiempo dado. Las restricciones imponen reglas de sentido común: no pueden ocupar la misma celda dos lanzaderas o dos artículos a la vez; los artículos solo pueden moverse cuando son transportados por lanzaderas; los flujos deben ser continuos desde el inicio hasta el final; y los artículos solicitados deben llegar finalmente al punto de recogida en la esquina del cubo. El objetivo global es simple de enunciar pero difícil de calcular: minimizar el número total de movimientos de lanzaderas y artículos combinados. Como este problema generaliza varios problemas difíciles bien conocidos en investigación operativa, resolverlo exactamente se vuelve imposible cuando el almacén supera un tamaño modesto.
Búsqueda híbrida: mezclar conjeturas inteligentes con comprobaciones exactas
Para dominar esta complejidad, los autores diseñan una heurística híbrida llamada ALNS‑IP. Parte de un plan codicioso que asigna cada artículo deseado a una lanzadera cercana y luego encamina ambos hacia el punto de recogida. Un procedimiento de búsqueda de vecindarios grandes adaptativa (ALNS) «destruye» repetidamente pequeñas partes de este plan —eliminando uno o más movimientos de trayectorias seleccionadas— y las «repara» usando un submodelo de programación entera que hace cumplir todas las reglas físicas. Con el tiempo, el algoritmo aprende qué tipos de cambios locales tienden a producir mejores resultados y los favorece. Pruebas extensas en almacenes simulados de forma cúbica de distintos tamaños, densidades de almacenamiento, niveles de demanda y número de lanzaderas muestran que este enfoque encuentra soluciones muy cercanas a las óptimas en casos pequeños y medianos, y planes factibles de alta calidad incluso cuando los solucionadores exactos agotan memoria o tiempo en casos más grandes.
Qué aporta realmente el movimiento vertical
Una pregunta clave es si permitir que las lanzaderas se muevan verticalmente además de horizontalmente merece realmente la ingeniería adicional. Al comparar su modelo 3D completo con una versión restringida que imita diseños anteriores, mayormente horizontales, los autores muestran que el movimiento vertical integrado puede reducir el número de movimientos requeridos en más del 10 % de media en casos de prueba pequeños, y hasta un 40 % en algunos diseños. Eso significa que los artículos llegan antes a los operarios o estaciones de empaquetado, con menos tráfico de robots y menos posibilidades de congestión. Los análisis de sensibilidad también revelan que simplemente añadir más lanzaderas no siempre ayuda —la coordinación se vuelve más difícil— mientras que una mayor demanda incrementa naturalmente el número de movimientos pero sigue siendo manejable dentro del marco propuesto.
Panorama general: hacia almacenes robóticos 3D prácticos
En términos sencillos, este trabajo muestra cómo coreografiar flotas de pequeños robots en un almacén tipo rompecabezas tridimensional para que realicen solo los movimientos necesarios, ni uno más, para recoger lo que piden los clientes. La combinación de una descripción matemática detallada y un algoritmo de búsqueda inteligente convierte un problema de planificación intratable en algo que puede resolverse con suficiente rapidez para decisiones reales de diseño y operación. A medida que los almacenes urbanos crezcan en altura y se automaticen, estas herramientas podrían ayudar a las empresas a decidir cuántos robots comprar, cómo distribuir sus rejillas de almacenamiento y cómo explotar el espacio vertical sin ralentizar la velocidad de recuperación.
Cita: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
Palabras clave: almacén automatizado, almacenamiento tipo rompecabezas, robots lanzadera, programación entera, optimización heurística