Clear Sky Science · ar
تحسين أنظمة التخزين القائمة على المتاهة متعددة المستويات والمعتمدة على الشتل مع ديناميكيات أفقية ورأسية باستخدام البرمجة الصحيحة وALNS-IP
لماذا تُهمّ التخزين الأذكى في الحياة اليومية
خلف كل توصيل في نفس اليوم وكل طلب استلام من المتجر يوجد مستودع يتسابق للعثور على السلع والتقاطها وشحنها في غضون دقائق. مع تزايد كثافة المدن وارتفاع التسوّق عبر الإنترنت، يتعيّن على الشركات ضغط المزيد من البضائع في مساحات أقل من دون التباطؤ. تستعرض هذه المقالة نوعًا جديدًا من المخازن عالية الكثافة التي تعمل مثل لغز انزلاق ثلاثي الأبعاد، إلى جانب طريقة تخطيط تقرر كيف ينبغي لروبوتاتها أن تتحرك. النتيجة هي استرجاع أسرع، حركات روبوت أقل، وأنظمة قادرة عمليًا على التعامل مع ضغط التجارة الإلكترونية الحديثة.
من الممرات والرافعات إلى ألغاز الانزلاق
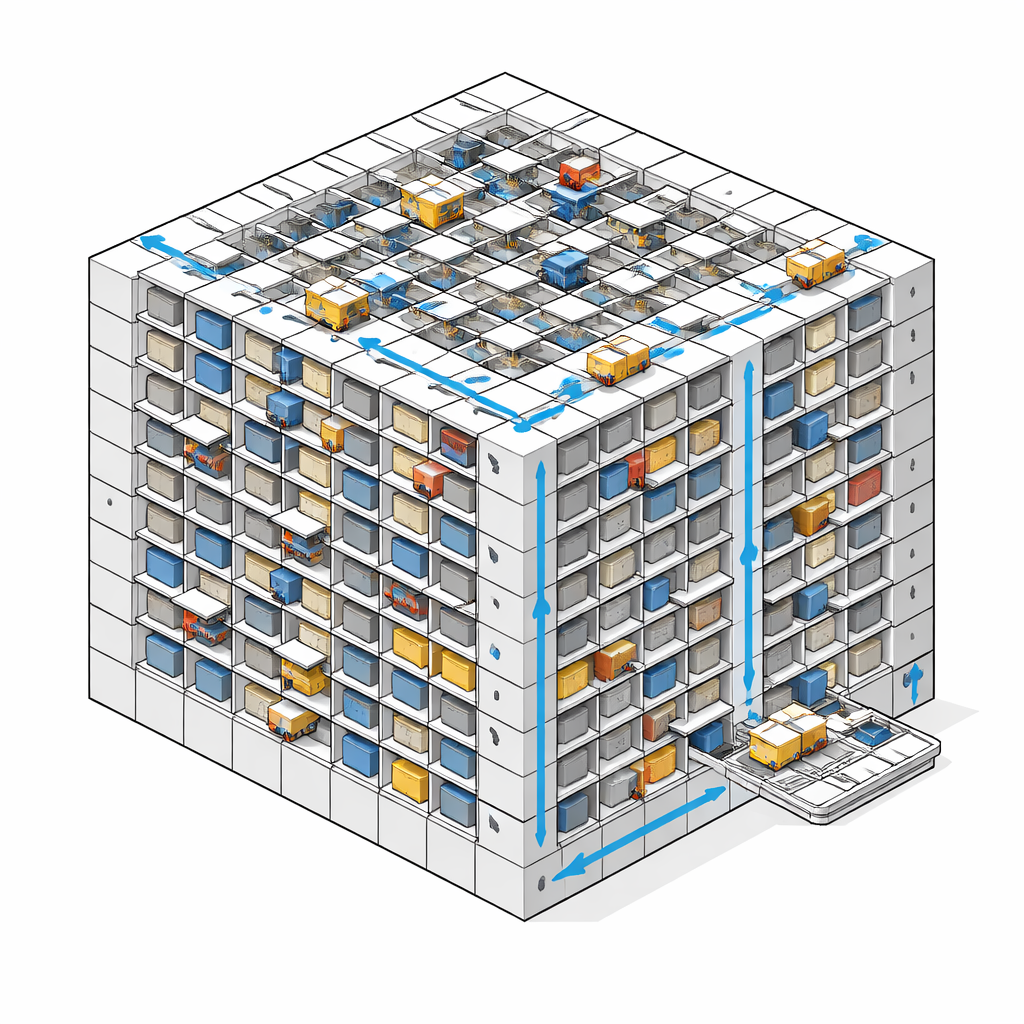
تخصص المستودعات التقليدية ما يصل إلى 40% من أرضها لممرات ثابتة لتتمكّن الشاحنات أو الرافعات من التحرك بين الأرفف. تعيد أنظمة التخزين القائمة على الألغاز التفكير في هذا التصميم. توضع السلع في شبكة محكمة، وبدلاً من أن يسافر الأشخاص أو المركبات لمسافات طويلة، تتحرّك الأرفف نفسها حول مساحة خالية «مرافقة» شبيهة بقطع لعبة الألغاز الشهيرة ذات الخمست عشرة قطعة. يمكن لهذا التصميم الخالي من الممرات أن يكدّس 30–50% مزيدًا من العناصر في نفس المساحة. تبني الدراسة على هذه الفكرة وتتخيل هذا اللغز ممتدًا في مكعب: رفوف مكدسة على مستويات متعددة، مع روبوتات شتل ذاتية الحركة تنقل الحمولات جانبياً وعمودياً صعودًا أو هبوطًا.
إضافة البُعد الثالث المفقود
تعاملت معظم الأبحاث السابقة مع هذه الأنظمة الشبيهة بالألغاز على أنها مسطحة. تنزلق العناصر شمالًا أو جنوبًا أو شرقًا أو غربًا، بينما كانت أي حركة رأسية—مثل المصعد—تُدار بشكل منفصل أو تُهمل في عملية التحسين. لكن المستودعات الحقيقية تزداد تشابهًا بمتاهات ثلاثية الأبعاد، ويجب على روبوتاتها التنسيق في جميع الاتجاهات. يحدد المؤلفون هذا كفجوة حاسمة: لا يوجد نموذج رياضي حالي يُحسّن الاسترجاع في شبكة لغز ثلاثية الأبعاد كاملة حيث يمكن للشتلات التحرك في ستة اتجاهات ويجب أن تتجنّب إعاقة أو تصادم بعضها ببعض عبر مستويات متعددة. يقدم عملهم أول نموذج متكامل من هذا النوع، بهدف تقليل عدد الحركات الفردية اللازمة لجلب جميع العناصر المطلوبة إلى نقطة إدخال/إخراج واحدة.
تحويل مستودع معقد إلى معادلات
لالتقاط سلوك المستودع، يصف الباحثون النظام كشبكة من المواضع في الفراغ وسلسلة من خطوات زمنية. تسجل المتغيرات الثنائية للقرار ما إذا كان شتل أو عنصر معين يتحرك من خلية إلى خلية مجاورة—أفقياً أو رأسياً—في زمن معين. تفرض القيود قواعد عقلانية: لا يمكن لشتلين أو عنصرين أن يشغلا نفس الخلية في آن واحد؛ لا تتحرك العناصر إلا عندما تحملها شتل؛ يجب أن تكون التدفقات مستمرة من البداية إلى النهاية؛ ويجب أن تصل العناصر المطلوبة في النهاية إلى نقطة الالتقاط في زاوية المكعب. الهدف الكلي بسيط في الصياغة لكنه صعب في الحساب: تقليل العدد الإجمالي للحركات لجميع الشتل والعناصر مجتمعة. وبما أن هذه المسألة تعمم عدة مشكلات يصعب حلّها في بحوث العمليات، يصبح حلها بدقة مستحيلًا بمجرد أن يتجاوز المستودع حجمًا متواضعًا.
بحث هجيني: مزج التخمينات الذكية مع التحققات الدقيقة
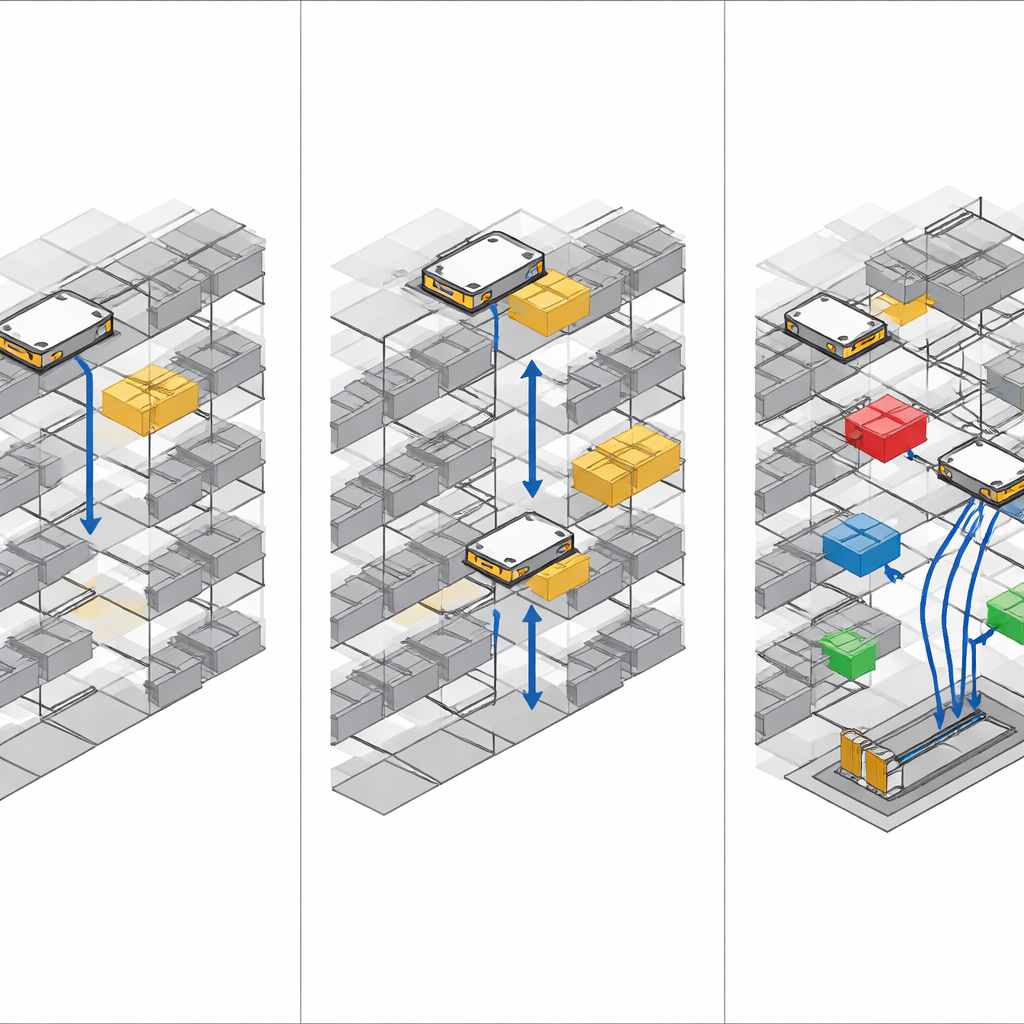
للسيطرة على هذه التعقيدات، يصمّم المؤلفون خوارزمية هجينة اسمها ALNS‑IP. تبدأ بخطة جشعة تعيّن كل عنصر مطلوب إلى شتل قريب ثم توجه كليهما نحو نقطة الالتقاط. تعمل عملية البحث التكيفية في مناطق كبيرة (ALNS) على «تدمير» أجزاء صغيرة من هذه الخطة مرارًا—بإزالة حركة واحدة أو أكثر من مسارات عناصر مختارة—ثم «إصلاح»ها باستخدام نموذج فرعي من البرمجة الصحيحة الذي يفرض جميع القواعد الفيزيائية. بمرور الوقت تتعلم الخوارزمية أي أنواع التغييرات المحلية تميل لإنتاج نتائج أفضل وتفضّلها. تُظهر اختبارات واسعة على مستودعات شكل مكعب محاكية بأحجام وكثافات تخزين ومستويات طلبات وعدد شتل مختلفة أن هذا النهج يجد حلولًا قريبة جدًا من المثلى في الحالات الصغيرة والمتوسطة، وخططًا قابلة للتنفيذ عالية الجودة حتى عندما تستنفد المحللات الدقيقة الذاكرة أو الوقت في الحالات الأكبر.
ما الفائدة الحقيقية من الحركة الرأسية
سؤال محوري هو ما إذا كانت السماح للشتلات بالتحرك عمودياً بالإضافة إلى أفقياً يستحق التعقيد الهندسي المضاف. بمقارنة نموذجهم ثلاثي الأبعاد الكامل مع نسخة مقيدة تُحاكي التصاميم القديمة الأفقية في الغالب، يبيّن المؤلفون أن الحركة الرأسية المتكاملة يمكن أن تقلّل عدد الحركات المطلوبة بأكثر من 10% في المتوسط في حالات اختبار صغيرة، وبما يصل إلى 40% في بعض التخطيطات. هذا يعني أن العناصر تصل إلى العمال أو محطات التعبئة أسرع، مع حركة روبوتات أقل وفرص أقل للازدحام. تُظهر تحليلات الحساسية أيضًا أن إضافة شتلات أكثر لا يساعد دائمًا—فالترتيب والتنسيق يصبحان أصعب—بينما يؤدي ارتفاع الطلب بطبيعة الحال إلى زيادة عدد الحركات لكنه يبقى قابلاً للإدارة ضمن الإطار المقترح.
الصورة الكبيرة: نحو مستودعات روبوتية ثلاثية الأبعاد عملية
بعبارات بسيطة، يبيّن هذا العمل كيف يمكن تنسيق أساطيل من الروبوتات الصغيرة في مستودع على شكل لغز انزلاقي ثلاثي الأبعاد بحيث تقوم بما يكفي من الحركات—ولا أكثر—لجلب ما يطلبه الزبائن. يحول الجمع بين وصف رياضي مفصل وخوارزمية بحث ذكية مسألة تخطيط يصعب حلّها إلى شيء يمكن حله بسرعة كافية لقرارات التصميم والتشغيل الواقعية. ومع ارتفاع مباني المخازن الحضرية وزيادة الأتمتة، قد تساعد هذه الأدوات الشركات على تقرير عدد الروبوتات التي يجب شراؤها، وكيفية تصميم شبكات التخزين، وكيفية استغلال المساحة الرأسية دون التأثير سلبًا على سرعة الاسترجاع.
الاستشهاد: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
الكلمات المفتاحية: مخزن آلي, تخزين قائم على الألغاز, روبوتات شتل, البرمجة الصحيحة (Integer Programming), تحسين بالهجينة (Heuristic Optimization)