Clear Sky Science · ru
Оптимизация многоуровневых пазловых систем хранения на базе шаттлов с горизонтальной и вертикальной динамикой с помощью целочисленного программирования и ALNS-IP
Почему умное хранение важно в повседневной жизни
За каждой доставкой в тот же день и каждой покупкой с самовывозом стоит склад, который стремится найти, собрать и отправить товары за считанные минуты. По мере роста плотности городов и бурного развития онлайн‑торговли компании вынуждены размещать больше товаров на меньшей площади, не снижая скорости операций. В этой статье рассматривается новый тип высокоплотного склада, работающего как трёхмерный головоломочный слайдинг‑пазл, и метод планирования, определяющий, как должны двигаться его роботы. Выгода — более быстрая выдача, меньше перемещений роботов и системы, способные реалистично справляться с нагрузкой современной электронной коммерции.
От рядов и погрузчиков к сдвигающимся пазлам
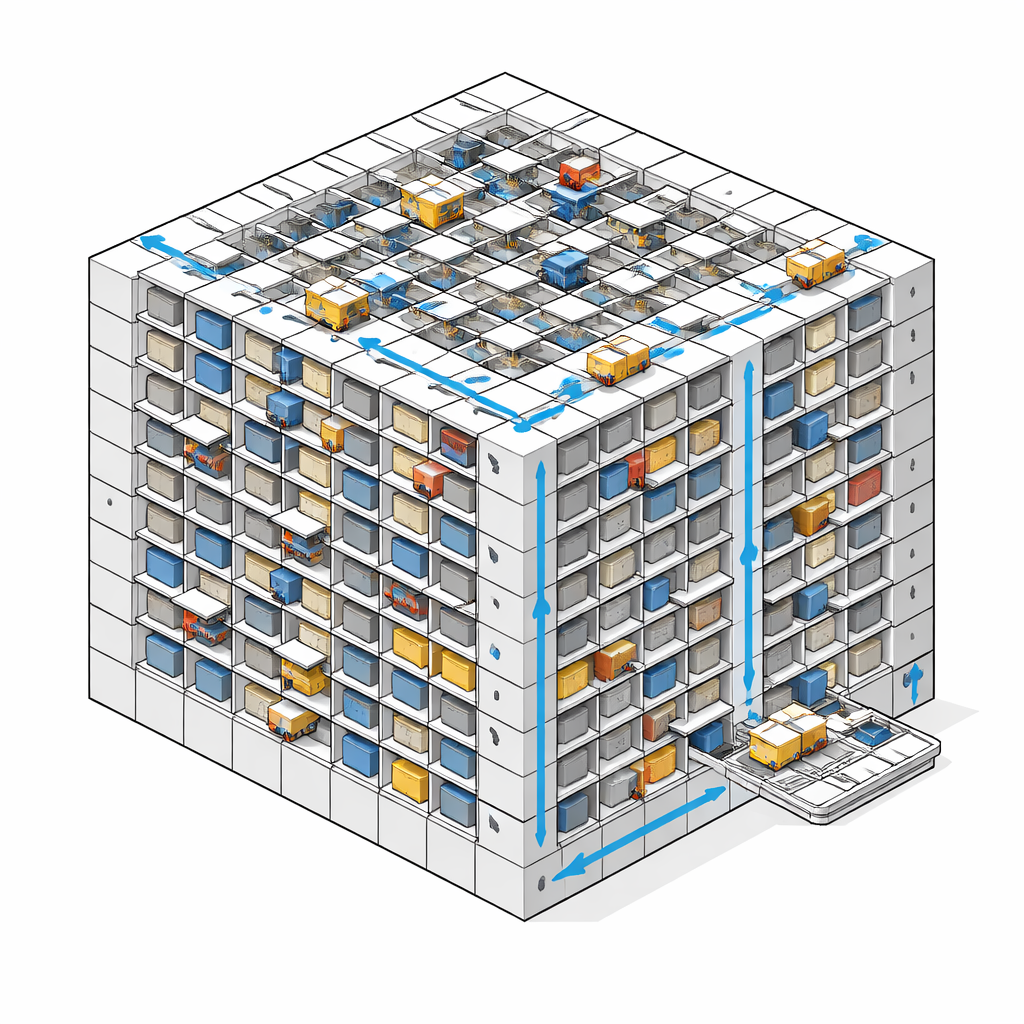
Традиционные склады выделяют до 40% площади под фиксированные проходы, чтобы грузовые тележки или погрузчики могли проезжать между стеллажами. Пазловые системы хранения переосмысливают эту планировку. Товары размещены в плотной сетке, и вместо того чтобы люди или машины преодолевали большие расстояния, сами стеллажи сдвигаются вокруг пустого «эскорта», подобно плиткам в классическом слайдинге на 15 элементов. Такой дизайн без проходов позволяет уместить на 30–50% больше позиций на той же площади. Авторы развивают эту идею и представляют пазл, расширенный в куб: стеллажи складываются в несколько уровней, а автономные шаттлы переносят грузы как по горизонтали, так и вверх‑вниз.
Добавление недостающего третьего измерения
Бóльшая часть предыдущих исследований рассматривала такие системы как плоские. Предметы сдвигались на север, юг, восток или запад, а любые вертикальные перемещения — например, подъёмы — обрабатывались отдельно или игнорировались в оптимизации. В реальности склады всё чаще напоминают трёхмерные лабиринты, и их роботы должны координироваться во всех направлениях. Авторы отмечают этот критический пробел: до настоящего времени не существовало математической модели, оптимизирующей выдачу в полностью 3D пазловой сетке, где шаттлы могут двигаться в шести направлениях и при этом не блокировать и не сталкиваться друг с другом на разных уровнях. Их работа вводит первую интегрированную модель, цель которой — минимизировать число отдельных перемещений, необходимых, чтобы доставить все запрошенные позиции к одной точке приёма/выдачи.
Преобразование сложного склада в уравнения
Чтобы описать поведение склада, исследователи представляют его как сетку позиций в пространстве и ряд временных шагов. Двоичные переменные решений фиксируют, перемещается ли конкретный шаттл или предмет из одной ячейки в соседнюю — по горизонтали или по вертикали — на данном временном шаге. Ограничения обеспечивают здравый смысл: в одной ячейке не могут находиться одновременно два шаттла или предмета; предметы могут перемещаться только если их несёт шаттл; потоки должны быть непрерывными от начала до конца; и запрошенные позиции в конечном итоге должны оказаться в точке приёма в углу куба. Общая цель проста по формулировке, но трудна в вычислении: минимизировать суммарное число перемещений всех шаттлов и предметов. Поскольку эта задача обобщает несколько известных сложных задач из области операционных исследований, точное решение становится невозможным уже при умеренных размерах склада.
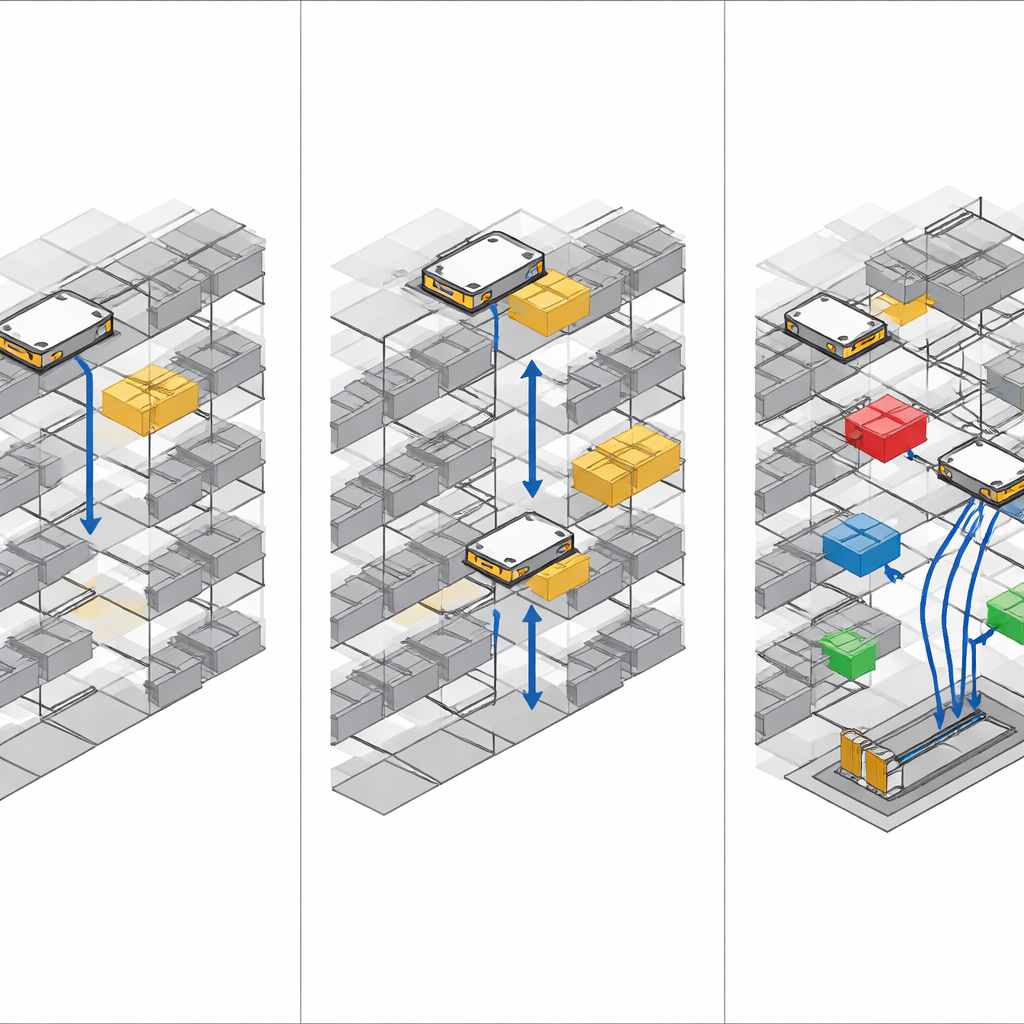
Гибридный поиск: сочетание разумных догадок с точной проверкой
Чтобы укротить эту сложность, авторы разработали гибридную эвристику под названием ALNS‑IP. Она начинается с жадного плана, который назначает каждый запрошенный предмет ближайшему шаттлу и затем прокладывает маршруты к точке приёма. Процедура адаптивного поиска по большим окрестностям (ALNS) многократно «разрушает» небольшие части этого плана — удаляя одно или несколько перемещений из выбранных путей предметов — и «восстанавливает» их с помощью целочисленной подмодели, которая учитывает все физические правила. Со временем алгоритм учится, какие типы локальных изменений обычно дают лучшие результаты, и отдаёт им предпочтение. Широкие тесты на симулированных кубических складах различных размеров, плотности хранения, уровнях спроса и количестве шаттлов показывают, что этот подход находит решения, очень близкие к оптимальным в малых и средних случаях, и высококачественные допустимые планы даже когда точные решатели расходуют память или время на больших задачах.
Что даёт вертикальное движение на самом деле
Ключевой вопрос — стоит ли дополнительная инженерная сложность того, чтобы шаттлы могли двигаться не только по горизонтали, но и по вертикали. Сравнивая полную 3D модель с ограниченной версией, имитирующей старые преимущественно горизонтальные конструкции, авторы показывают, что интегрированное вертикальное движение может сократить число необходимых перемещений более чем на 10% в среднем в небольших тестах и до 40% в некоторых компоновках. Это означает, что позиции достигают работников или упаковочных станций быстрее, при меньшем трафике роботов и меньшем риске застоев. Анализы чувствительности также показывают, что простое увеличение числа шаттлов не всегда помогает — координация усложняется — тогда как повышение спроса естественно увеличивает число перемещений, но остаётся управляемым в рамках предложенного подхода.
Общий вывод: к практическим 3D‑складам с роботами
Проще говоря, эта работа показывает, как скоординировать флот небольших роботов в трёхмерном пазловом складе так, чтобы они делали ровно столько движений, сколько нужно, и не больше, чтобы извлечь заказы клиентов. Сочетание детального математического описания и умного поискового алгоритма превращает неразрешимую задачу планирования в задачу, которую можно решить достаточно быстро для практических решений по проектированию и эксплуатации. По мере того как городские склады становятся выше и более автоматизированными, такие инструменты могут помочь компаниям решить, сколько роботов приобрести, как спроектировать сетку хранения и как использовать вертикальное пространство, не замедляя скорость выдачи.
Цитирование: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
Ключевые слова: автоматизированный склад, система хранения в виде пазла, шаттл‑роботы, целочисленное программирование, эвристическая оптимизация