Clear Sky Science · nl
Optimaliseren van meerlaagse shuttle-gebaseerde puzzelopslagsystemen met horizontale en verticale dynamiek met behulp van integerprogrammering en ALNS-IP
Waarom slimmer opslaan belangrijk is voor het dagelijks leven
Achter elke levering op dezelfde dag en elk click‑and‑collect‑order zit een magazijn dat racet om artikelen binnen enkele minuten te vinden, te picken en te verzenden. Nu steden dichter bevolkt raken en online winkelen explodeert, moeten bedrijven meer goederen in minder ruimte proppen zonder vertragingen. Dit artikel onderzoekt een nieuw type hoge‑dichtheidsmagazijn dat werkt als een driedimensionale schuifpuzzel, samen met een planningsmethode die bepaalt hoe de robots moeten bewegen. De winst: snellere ophaling, minder robotbewegingen en systemen die realistisch de drukte van moderne e‑commerce aankunnen.
Van gangen en heftrucks naar schuifpuzzels
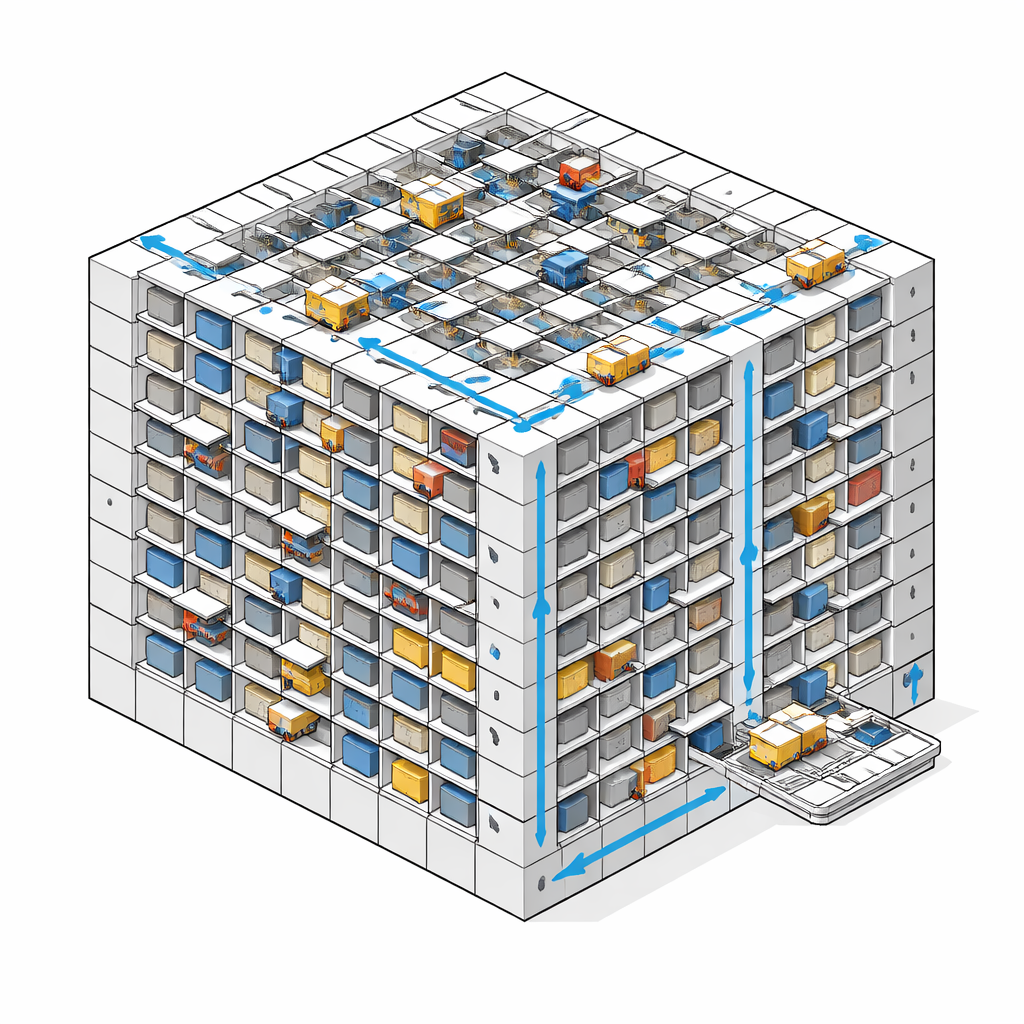
Conventionele magazijnen reserveren tot 40% van de vloer voor vaste gangen zodat trucks of heftrucks tussen rekken kunnen rijden. Puzzelgebaseerde opslagsystemen heroverwegen deze indeling. Goederen staan in een strak raster en in plaats van dat mensen of voertuigen grote afstanden afleggen, verschuiven de rekken zelf rond een lege "escort"‑ruimte, net als tegels in de klassieke 15‑stuk schuifpuzzel. Dit gangloze ontwerp kan 30–50% meer items in hetzelfde vloeroppervlak persen. De studie bouwt voort op dit idee en stelt zich zo’n puzzel voor als een kubus: rekken gestapeld in meerdere lagen, waarbij autonome shuttle‑robots lasten zijwaarts en omhoog of omlaag verplaatsen.
De ontbrekende derde dimensie toevoegen
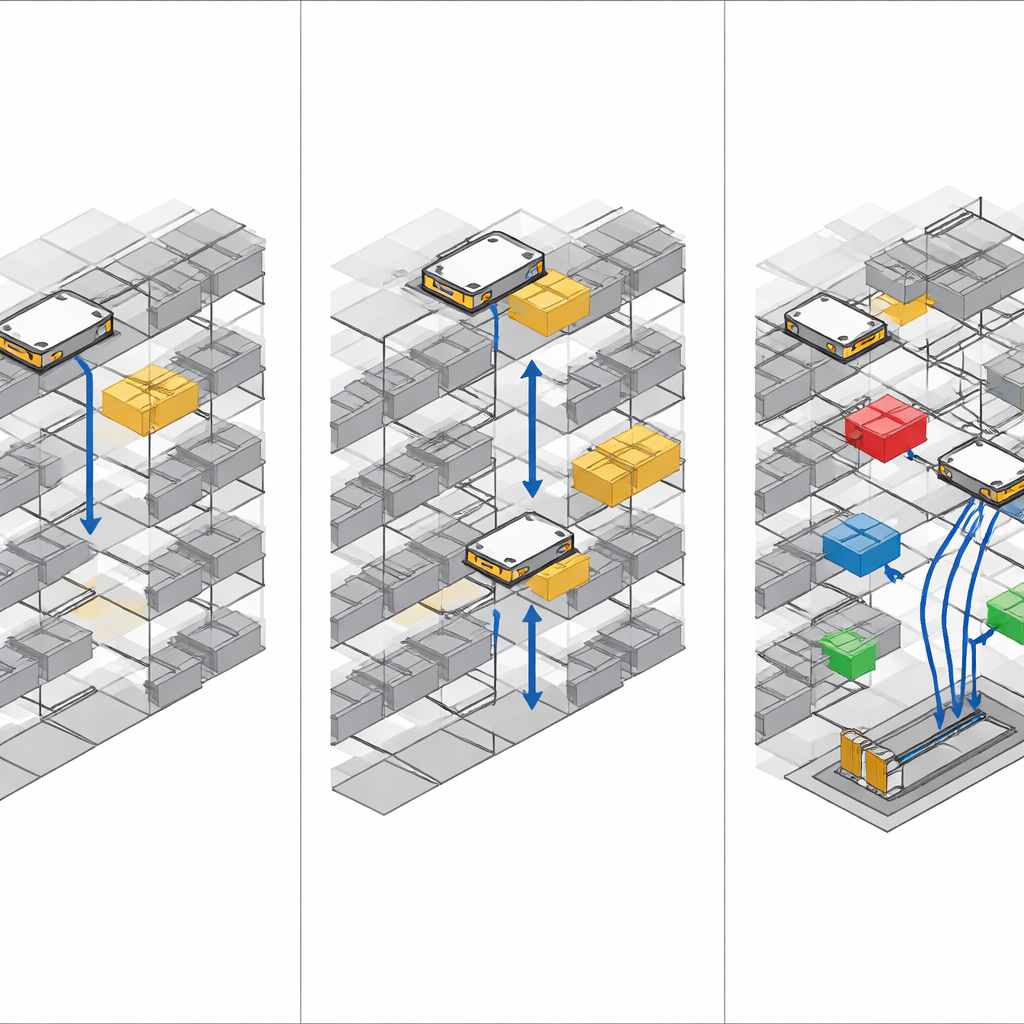
De meeste eerdere onderzoeken beschouwden deze puzzelachtige systemen als plat. Items schoven noord, zuid, oost of west, terwijl verticale beweging—zoals een lift—apart werd behandeld of genegeerd in de optimalisatie. Werkelijke magazijnen lijken echter steeds meer op driedimensionale doolhoven, en hun robots moeten in alle richtingen coördineren. De auteurs merken dit op als een cruciale lacune: er is nog geen wiskundig model dat de ophaling optimaliseert in een volledig 3D‑puzzelraster waarin shuttles in zes richtingen kunnen bewegen en elkaar niet mogen blokkeren of raken over meerdere lagen. Hun werk introduceert het eerste geïntegreerde model dat tot doel heeft het aantal individuele bewegingen te minimaliseren dat nodig is om alle gevraagde items naar één invoer/uitvoer‑punt te brengen.
Een complex magazijn terugbrengen tot vergelijkingen
Om het gedrag van het magazijn vast te leggen, beschrijven de onderzoekers het als een raster van posities in de ruimte en een reeks tijdstappen. Binaire beslissingsvariabelen registreren of een bepaalde shuttle of een item in een gegeven tijd van één cel naar een aangrenzende cel beweegt—horizontaal of verticaal. Beperkingen handhaven gezond verstand: geen twee shuttles of items kunnen tegelijk in dezelfde cel zitten; items kunnen alleen bewegen wanneer ze door shuttles worden gedragen; stromen moeten continu zijn van begin tot eind; en gevraagde items moeten uiteindelijk het ophaalpunt in de hoek van de kubus bereiken. Het doel is eenvoudig te formuleren maar moeilijk te berekenen: minimaliseer het totale aantal bewegingen van alle shuttles en items samen. Omdat dit probleem meerdere beruchte moeilijke problemen uit operations research generaliseert, wordt exact oplossen onmogelijk zodra het magazijn meer dan bescheiden van omvang is.
Hybride zoeken: slimme gissingen mengen met exacte controles
Om deze complexiteit te temmen, ontwerpen de auteurs een hybride heuristiek genaamd ALNS‑IP. Het begint met een gretig plan dat elk gewenst item een nabijgelegen shuttle toewijst en vervolgens beide naar het ophaalpunt routet. Een adaptive large neighborhood search (ALNS)‑procedure "vernietigt" herhaaldelijk kleine delen van dit plan—door één of meer bewegingen uit geselecteerde itempaden te verwijderen—en "repareert" ze vervolgens met een integerprogrammeringssubmodel dat alle fysieke regels afdwingt. In de loop van de tijd leert het algoritme welke typen lokale veranderingen geneigd zijn tot betere resultaten te leiden en geeft daar de voorkeur aan. Uitgebreide tests op gesimuleerde kubusvormige magazijnen van verschillende afmetingen, opslagdichtheden, vraagniveaus en aantallen shuttles tonen aan dat deze aanpak oplossingen vindt die in kleine en middelgrote gevallen zeer dicht bij optimaal liggen, en hoogwaardige haalbare plannen zelfs wanneer exacte oplossers geheugen of tijd te kort komen bij grotere gevallen.
Wat verticale beweging je echt oplevert
Een centrale vraag is of het toestaan dat shuttles zich zowel verticaal als horizontaal bewegen de extra techniek waard is. Door hun volledige 3D‑model te vergelijken met een beperkte versie die oudere, grotendeels horizontale ontwerpen nabootst, laten de auteurs zien dat geïntegreerde verticale beweging het aantal benodigde bewegingen met gemiddeld meer dan 10% kan verminderen in kleine testgevallen, en in sommige indelingen tot wel 40%. Dat betekent dat items sneller bij medewerkers of verpakkingsstations aankomen, met minder robotverkeer en minder kans op congestie. Sensitiviteitsanalyses tonen ook aan dat simpelweg meer shuttles toevoegen niet altijd helpt—coördinatie wordt moeilijker—terwijl hogere vraag uiteraard het aantal bewegingen opvoert maar binnen het voorgestelde kader beheersbaar blijft.
Groot perspectief: richting praktische 3D‑robotmagazijnen
Simpel gezegd toont dit werk hoe je fleets van kleine robots kunt choreograferen in een driedimensionaal schuifpuzzelmagazijn zodat ze precies genoeg bewegen, en niet meer, om te halen wat klanten bestellen. De combinatie van een gedetailleerde wiskundige beschrijving en een slim zoekalgoritme verandert een onhandelbaar planningsprobleem in iets dat snel genoeg kan worden opgelost voor echte ontwerp‑ en operationele beslissingen. Nu stedelijke magazijnen hoger en geautomatiseerder worden, kunnen dergelijke hulpmiddelen bedrijven helpen beslissen hoeveel robots ze moeten aanschaffen, hoe ze hun opslagrasters moeten indelen en hoe ze verticale ruimte kunnen benutten zonder de ophaalsnelheid te vertragen.
Bronvermelding: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
Trefwoorden: geautomatiseerd magazijn, puzzelgebaseerde opslag, shuttle-robots, integerprogrammering, heuristische optimalisatie