Clear Sky Science · de
Optimierung mehrstufiger, shuttle‑basierter Puzzle‑Lagersysteme mit horizontaler und vertikaler Dynamik mittels ganzzahliger Programmierung und ALNS‑IP
Warum schlauere Lagerhaltung den Alltag verbessert
Hinter jeder Lieferung am selben Tag und jedem Click‑and‑Collect‑Auftrag steht ein Lager, das darum kämpft, Artikel in Minuten zu finden, zu kommissionieren und zu versenden. Mit dichter werdenden Städten und steigendem Online‑Handel müssen Unternehmen mehr Waren auf weniger Fläche unterbringen, ohne dabei an Geschwindigkeit zu verlieren. Dieser Artikel untersucht eine neue Form von hochdichtem Lager, die wie ein 3D‑Schiebepuzzle funktioniert, sowie eine Planungsmethode, die entscheidet, wie die Roboter sich bewegen sollen. Der Gewinn: schnellere Entnahme, weniger Robotbewegungen und Systeme, die den Ansturm moderner E‑Commerce‑Anforderungen realistisch bewältigen können.
Von Gängen und Gabelstaplern zum Schiebepuzzle
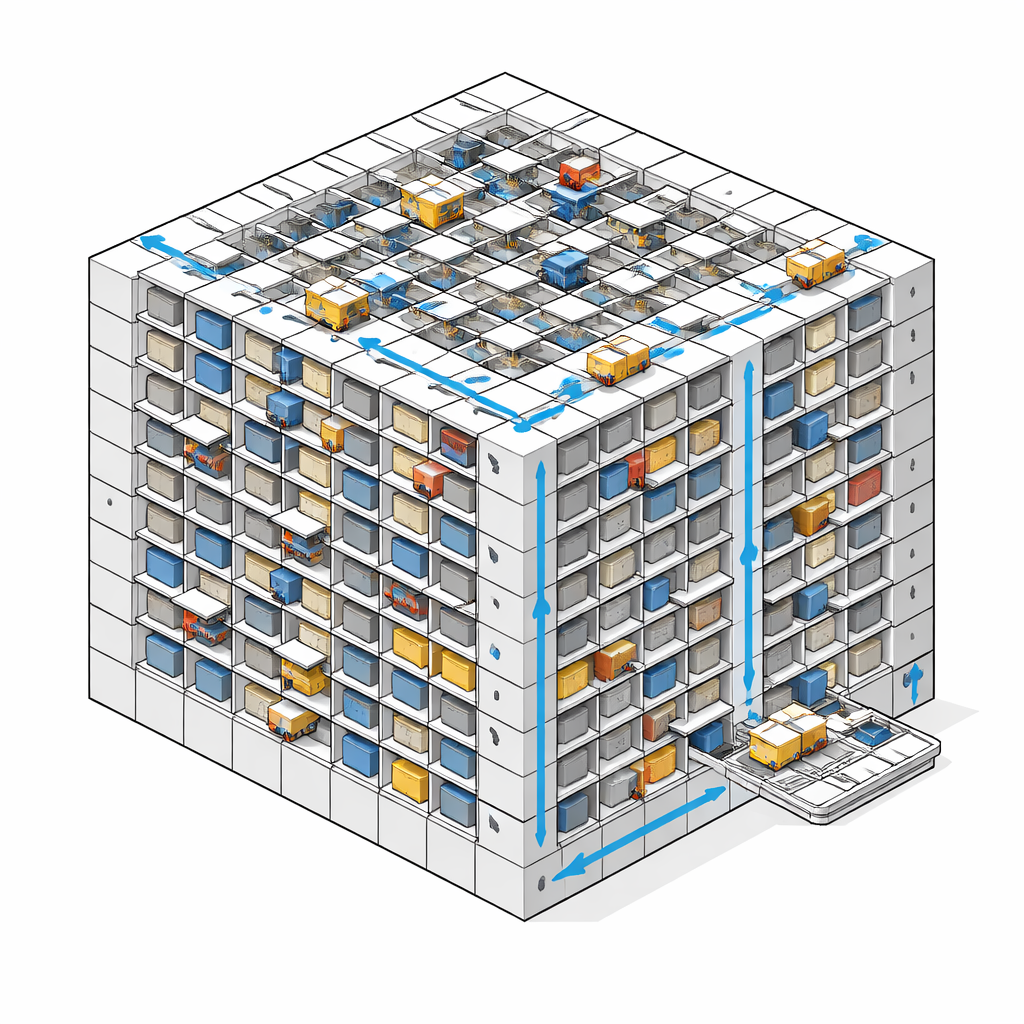
Konventionelle Lager widmen bis zu 40 % ihrer Grundfläche festen Gängen, damit Lkw oder Gabelstapler zwischen Regalen fahren können. Puzzle‑basierte Lagersysteme denken dieses Layout neu. Waren stehen in einem dichten Raster, und statt dass Menschen oder Fahrzeuge lange Strecken zurücklegen, verschieben sich die Regalfelder um einen leeren „Begleitraum“, ähnlich den Kacheln im klassischen 15‑Puzzle. Dieses gangfreie Design kann 30–50 % mehr Artikel auf derselben Fläche unterbringen. Die Studie baut auf dieser Idee auf und denkt das Puzzle als Würfel weiter: Regale sind mehrstufig gestapelt, und autonome Shuttle‑Roboter bewegen Lasten seitwärts sowie nach oben und unten.
Die fehlende dritte Dimension hinzufügen
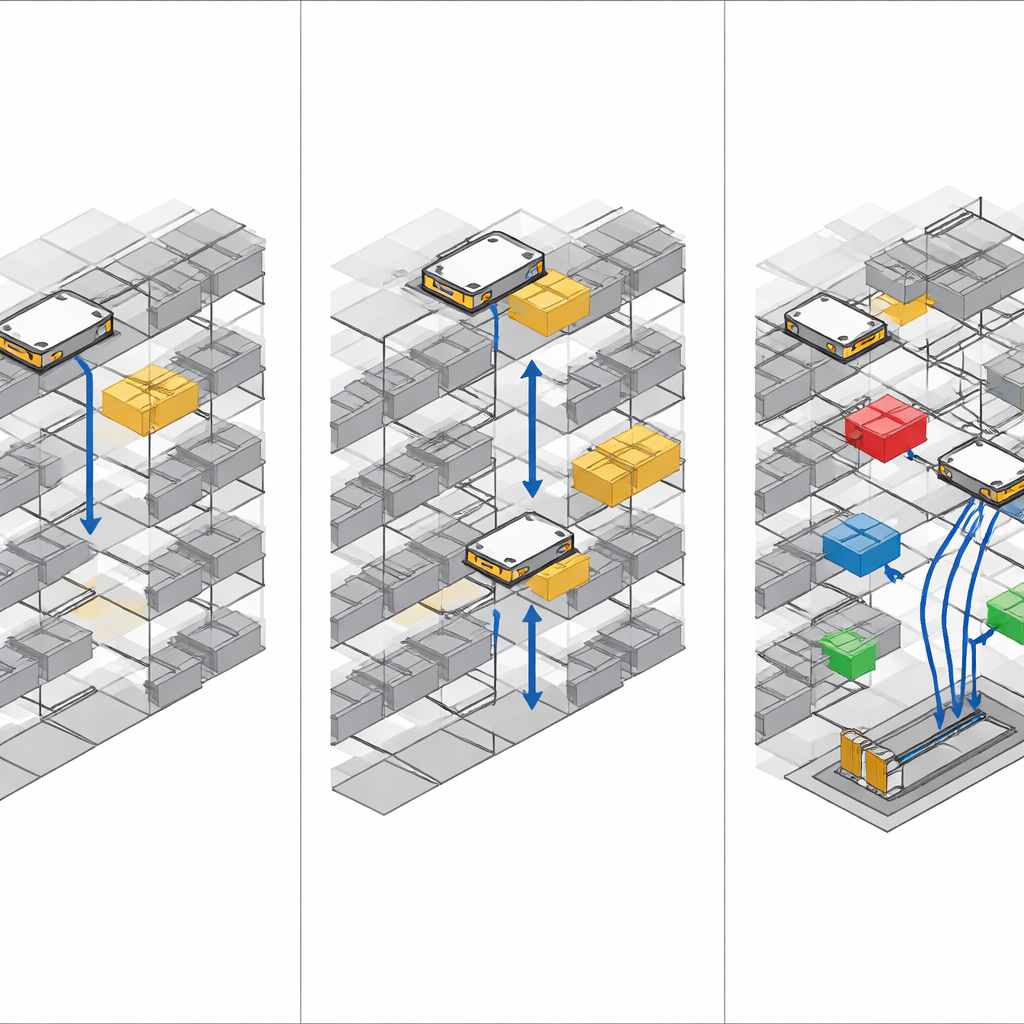
Frühere Arbeiten behandelten solche Puzzle‑Systeme meist als flach. Gegenstände wurden nach Norden, Süden, Osten oder Westen geschoben, während vertikale Bewegungen – etwa ein Aufzug – separat behandelt oder in der Optimierung vernachlässigt wurden. Reale Lager ähneln jedoch zunehmend dreidimensionalen Labyrinthen, und ihre Roboter müssen in allen Richtungen koordiniert werden. Die Autoren identifizieren dies als eine kritische Lücke: Es gibt kein vorhandenes mathematisches Modell, das die Entnahme in einem vollständig 3D‑Puzzle‑Raster optimiert, in dem Shuttles in sechs Richtungen fahren können und sich über mehrere Ebenen hinweg nicht gegenseitig blockieren oder kollidieren dürfen. Ihre Arbeit führt das erste integrierte Modell ein, das darauf abzielt, die Anzahl einzelner Bewegungen zu minimieren, die nötig sind, um alle angeforderten Artikel zu einem einzigen Ein-/Ausgabepunkt zu bringen.
Ein komplexes Lager in Gleichungen übersetzen
Um das Verhalten des Lagers zu beschreiben, modellieren die Forschenden es als Raster von Positionen im Raum und als eine Reihe von Zeitschritten. Binäre Entscheidungsvariablen erfassen, ob ein bestimmtes Shuttle oder ein Artikel sich in einem gegebenen Schritt von einer Zelle in eine benachbarte Zelle bewegt – horizontal oder vertikal. Nebenbedingungen erzwingen sinnvolle Regeln: Nicht zwei Shuttles oder Artikel dürfen gleichzeitig dieselbe Zelle besetzen; Artikel können sich nur bewegen, wenn sie von Shuttles getragen werden; Flüsse müssen vom Start bis zum Ziel kontinuierlich sein; und angeforderte Artikel müssen schließlich den Abgabepunkt in einer Ecke des Würfels erreichen. Das Gesamtziel ist einfach zu formulieren, aber schwer zu berechnen: die Gesamtzahl der Bewegungen aller Shuttles und Artikel zu minimieren. Da dieses Problem mehrere berüchtigte, schwierige Probleme der Operations Research verallgemeinert, wird eine exakte Lösung unmöglich, sobald das Lager über eine bescheidene Größe hinaus wächst.
Hybride Suche: kluge Vermutungen mit exakten Prüfungen mischen
Um diese Komplexität zu bändigen, entwerfen die Autoren eine hybride Heuristik namens ALNS‑IP. Sie beginnt mit einem gierigen Plan, der jeden gewünschten Artikel einem nahegelegenen Shuttle zuweist und beide dann zum Abgabepunkt routet. Ein adaptives Large Neighborhood Search (ALNS)‑Verfahren zerstört danach wiederholt kleine Teile dieses Plans – indem eine oder mehrere Bewegungen aus ausgewählten Artikelpfaden entfernt werden – und repariert sie mit einem ganzzahligen Teilmodell, das alle physikalischen Regeln erzwingt. Mit der Zeit lernt der Algorithmus, welche Arten lokaler Änderungen tendenziell bessere Ergebnisse liefern, und bevorzugt diese. Umfangreiche Tests an simulierten würfelförmigen Lagern unterschiedlicher Größe, Lagerdichte, Nachfragelevels und Shuttle‑Anzahlen zeigen, dass dieser Ansatz in kleinen und mittleren Fällen Lösungen findet, die den optimalen sehr nahekommen, und auch bei größeren Fällen qualitativ hochwertige, zulässige Pläne liefert, wenn exakte Solver wegen Speicher- oder Zeitmangel versagen.
Was vertikale Bewegung wirklich bringt
Eine zentrale Frage ist, ob es den zusätzlichen technischen Aufwand wert ist, Shuttles auch vertikal bewegen zu lassen. Durch den Vergleich ihres vollständigen 3D‑Modells mit einer eingeschränkten Version, die ältere, überwiegend horizontale Designs nachbildet, zeigen die Autoren, dass integrierte vertikale Bewegung die benötigten Bewegungen in kleinen Testfällen im Schnitt um mehr als 10 % reduzieren kann und in manchen Layouts um bis zu 40 %. Das bedeutet, dass Artikel schneller zu Arbeitsplätzen oder Packstationen gelangen, mit weniger Robotverkehr und geringerer Staugefahr. Sensitivitätsanalysen zeigen außerdem, dass bloßes Hinzufügen weiterer Shuttles nicht immer hilft – die Koordination wird schwieriger –, während höhere Nachfrage naturgemäß die Zahl der Bewegungen erhöht, im vorgeschlagenen Rahmen aber weiterhin handhabbar bleibt.
Großes Fazit: auf dem Weg zu praktischen 3D‑Roboterlagern
Einfach gesagt zeigt diese Arbeit, wie man Flotten kleiner Roboter in einem dreidimensionalen Schiebepuzzle‑Lager so choreografiert, dass sie gerade genug bewegen – und nicht mehr –, um die Bestellungen der Kunden zu holen. Die Kombination aus einer detaillierten mathematischen Beschreibung und einer schlauen Suchalgorithmus verwandelt ein unlösbar erscheinendes Planungsproblem in etwas, das schnell genug gelöst werden kann, um reale Design‑ und Betriebsentscheidungen zu unterstützen. Mit dem vertikalen Wachstum urbaner Lager und zunehmender Automatisierung könnten solche Werkzeuge Unternehmen helfen zu entscheiden, wie viele Roboter sie anschaffen sollten, wie sie ihre Speichergrids anordnen und wie sie vertikalen Raum nutzen können, ohne die Entnahmegeschwindigkeit zu beeinträchtigen.
Zitation: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
Schlüsselwörter: automatisiertes Lager, puzzlebasiertes Lager, Shuttle‑Roboter, ganzzahlige Programmierung, heuristische Optimierung