Clear Sky Science · ja
整数計画法とALNS‑IPを用いた水平・垂直動態を持つ多層シャトル式パズル型倉庫システムの最適化
なぜより賢い保管が日常生活に重要なのか
同日配送やクリック&コレクトの注文の裏側には、数分で商品を探し、ピックし、出荷するために競う倉庫があります。都市がより密集し、オンライン購買が急増する中、企業は速度を落とさずにより多くの商品をより小さな空間に詰め込む必要があります。本稿は、3次元のスライディングパズルのように機能する高密度倉庫の新しい形態と、そのロボットの動きを決める計画手法を紹介します。得られる効果は、取り出しの高速化、ロボットの移動削減、そして現代のeコマースの負荷を現実的にさばけるシステムの実現です。
通路とフォークリフトからスライディングパズルへ
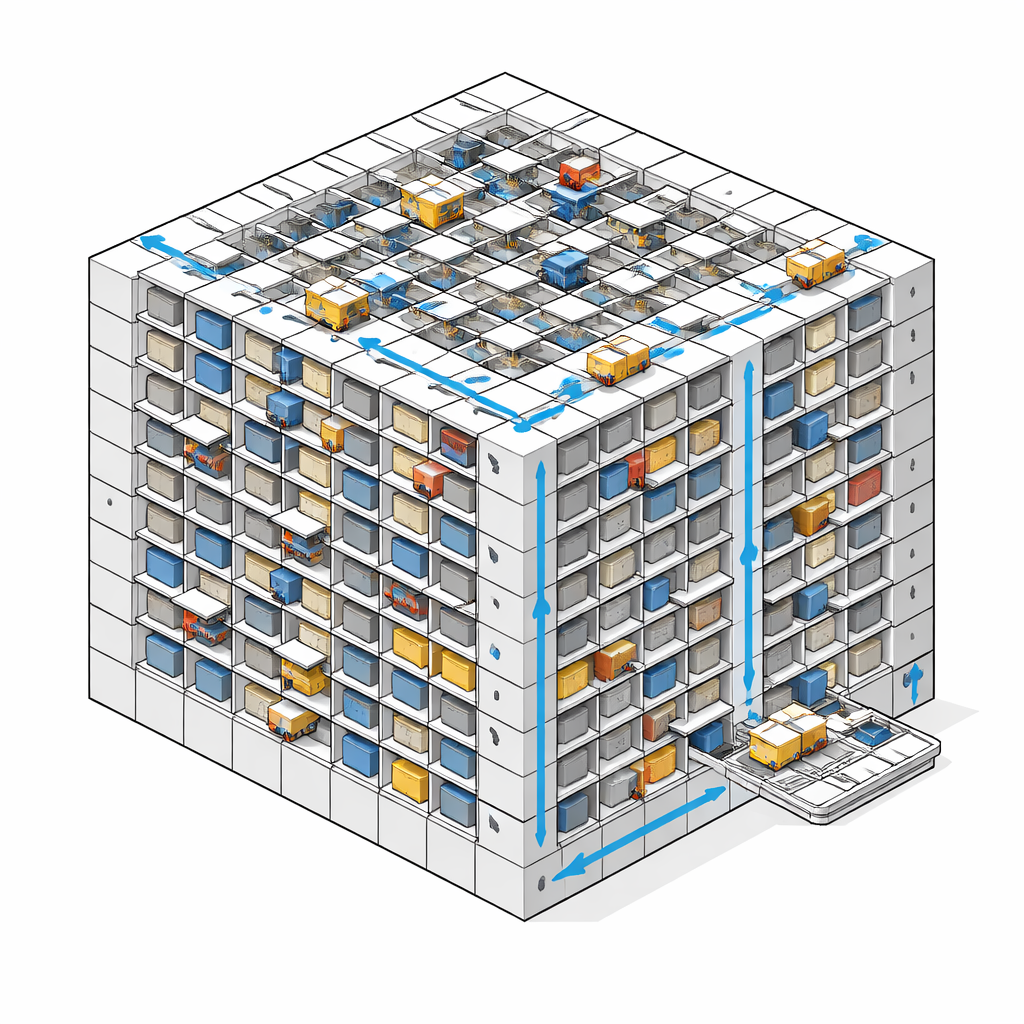
従来の倉庫では、棚の間をトラックやフォークリフトが通行できるように床面の最大40%が固定通路に割かれます。パズル型ストレージはこのレイアウトを再考します。商品は隙間の少ないグリッドに置かれ、人や車両が長距離を移動する代わりに、空いた「エスコート」スペースの周りで棚自体がスライドします。ちょうど伝統的な15パズルのタイルのようです。この通路不要の設計は同じ面積で30〜50%多くの商品を詰められます。本研究はこの考えを拡張し、立方体状に積み重ねたラックを想定します。自律シャトルロボットが水平方向だけでなく上下方向にも荷物を移動させる構成です。
欠けていた第三の次元を加える
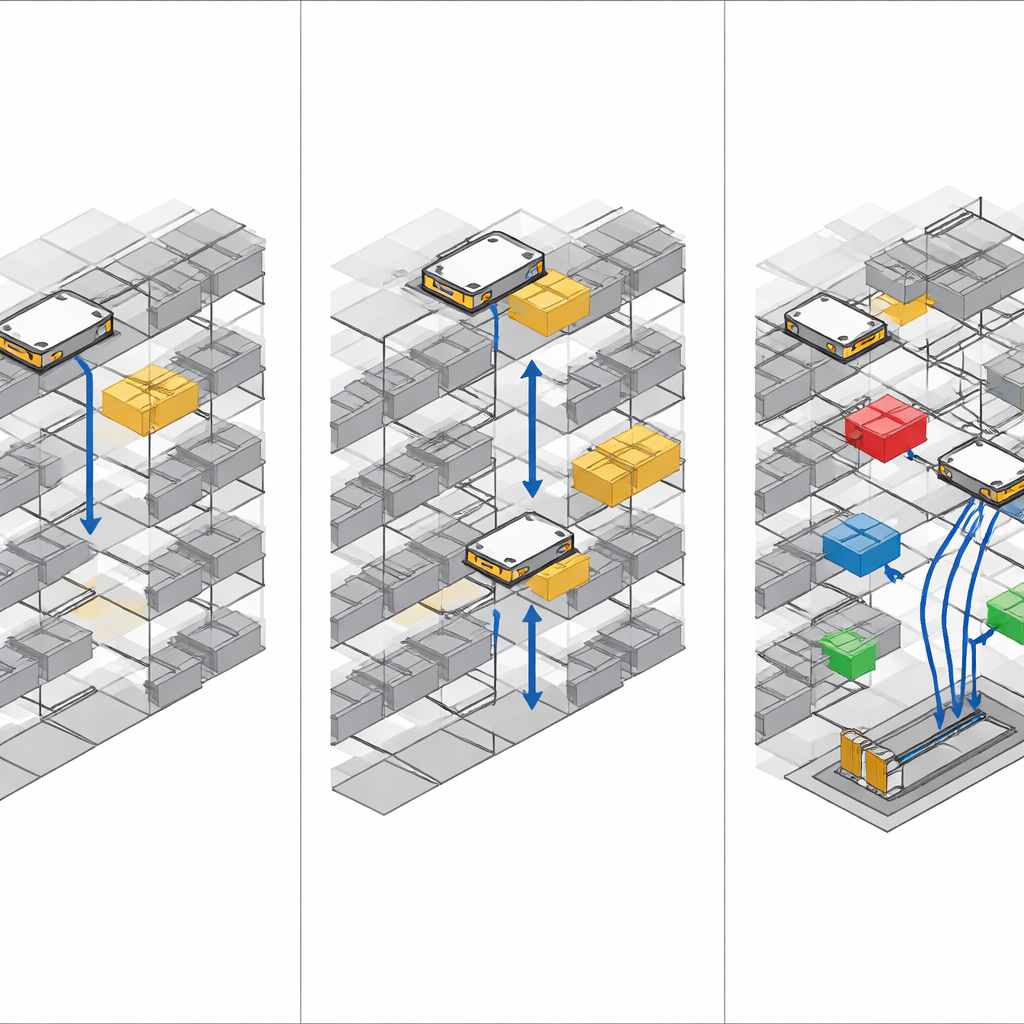
従来の研究の多くはこれらのパズル型システムを平面として扱ってきました。アイテムは北・南・東・西にスライドし、リフトのような垂直移動は別扱いにされたり最適化から除外されたりしていました。しかし実際の倉庫はますます三次元の迷路のようになっており、ロボットは全方向で協調する必要があります。著者らはここに重要なギャップを見出しました。すなわち、シャトルが六方向に移動でき、複数階にわたって互いに遮られたり衝突したりしないようにしながら、完全な3Dパズルグリッドで取り出しを最適化する数理モデルは存在しないという点です。本研究はそのような統合モデルを初めて導入し、要求されたすべてのアイテムを単一の入出力点まで持ってくるために必要な個別移動数を最小化することを目指します。
複雑な倉庫を方程式に変える
倉庫の振る舞いを捉えるために、研究者らは空間の位置の格子と一連の時間ステップとして記述します。二値の意思決定変数が、特定のシャトルやアイテムがある時刻に一つのセルから隣接セルへ(水平または垂直に)移動するかどうかを記録します。制約は常識的なルールを課します:同じセルに二つ以上のシャトルやアイテムが同時に存在してはならない;アイテムはシャトルに載せられている場合にのみ移動できる;フローは開始から終了まで連続していなければならない;要求されたアイテムは最終的に立方体の隅にあるピックアップ点に到達しなければならない。全体の目的は単純に述べられますが計算は困難です:すべてのシャトルとアイテムの合計移動回数を最小化すること。これは複数の難解な最適化問題を一般化するため、倉庫がほんの少し大きくなるだけで厳密解を得ることが不可能になります。
ハイブリッド探索:賢い推測と厳密検査の混成
この複雑さに対処するため、著者らはALNS‑IPと呼ばれるハイブリッドヒューリスティックを設計しました。まず貪欲法で各要求アイテムを近傍のシャトルに割り当て、両者をピックアップ点に向かわせる計画を作ります。次に適応的大規模近傍探索(ALNS)手法が繰り返しこの計画の小さな部分を「破壊」します—選んだアイテム経路から一つ以上の移動を除去し—そして整数計画のサブモデルを用いて物理ルールをすべて満たすように「修復」します。時間とともにアルゴリズムはどの種類の局所的変更が良い結果を生みやすいかを学習し、それらを優先します。立方体状の倉庫をさまざまなサイズ、保管密度、需要レベル、シャトル数でシミュレーションした広範なテストにより、この手法は小〜中規模では最適解に非常に近い解を見つけ、大規模では厳密ソルバーがメモリや時間不足になる場合でも高品質な実行可能解を得られることが示されました。
垂直移動が本当にもたらす価値
重要な疑問は、シャトルが水平に加えて垂直にも動けるようにする追加の工学的コストに見合う効果があるかどうかです。著者らは完全な3Dモデルと、従来の主に水平設計を模した制限版を比較することで、垂直移動を統合することが小規模なテストケースで平均10%以上、ある配置では最大40%もの移動回数削減につながることを示しています。つまり、アイテムは作業者や梱包ステーションにより速く届き、ロボットのトラフィックや混雑の機会が減ります。感度分析からは、単にシャトルを増やすだけでは常に有効でないこと—協調がより困難になる—や、需要が高くなるほど移動回数は増えるが提案手法の枠組み内で管理可能であることも明らかになりました。
大局的見地:実用的な3Dロボット倉庫に向けて
平たく言えば、本研究は小型ロボット群を三次元のスライディングパズル型倉庫で必要最小限の動きだけを行わせ、顧客が注文した物を効率的に取り出す方法を示しています。詳細な数理記述と賢い探索アルゴリズムの組合せにより、難解な計画問題を設計・運用上の意思決定に十分速く解けるものに変えます。都市型倉庫がより高層化し自動化が進むにつれて、このようなツールは企業が何台のロボットを導入すべきか、ストレージグリッドをどのように配置すべきか、垂直空間をどのように活用して取り出し速度を損なわないかを判断するのに役立ち得ます。
引用: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
キーワード: 自動倉庫, パズル型ストレージ, シャトルロボット, 整数計画法, ヒューリスティック最適化