Clear Sky Science · pl
Optymalizacja wielopoziomowych systemów magazynowania typu łamigłówka z ruchem poziomym i pionowym za pomocą programowania całkowitoliczbowego i ALNS‑IP
Dlaczego inteligentniejsze magazynowanie ma znaczenie w życiu codziennym
Za każdą dostawą tego samego dnia i zamówieniem z odbiorem w punkcie odbioru stoi magazyn ścigający się, by w ciągu minut znaleźć, pobrać i wysłać towary. W miarę jak miasta stają się gęstsze, a handel internetowy rośnie, firmy muszą upakować więcej towarów na mniejszej powierzchni, nie zwalniając tempa. Ten artykuł opisuje nowy typ wysokogęstościowego magazynu działającego jak trójwymiarowa łamigłówka przesuwna oraz metodę planowania, która decyduje o ruchach robotów. Efekt to szybsze pobieranie, mniej ruchów robotów i systemy, które realistycznie poradzą sobie z natężeniem współczesnego e‑handlu.
Od alejek i wózków widłowych do łamigłówek przesuwanych
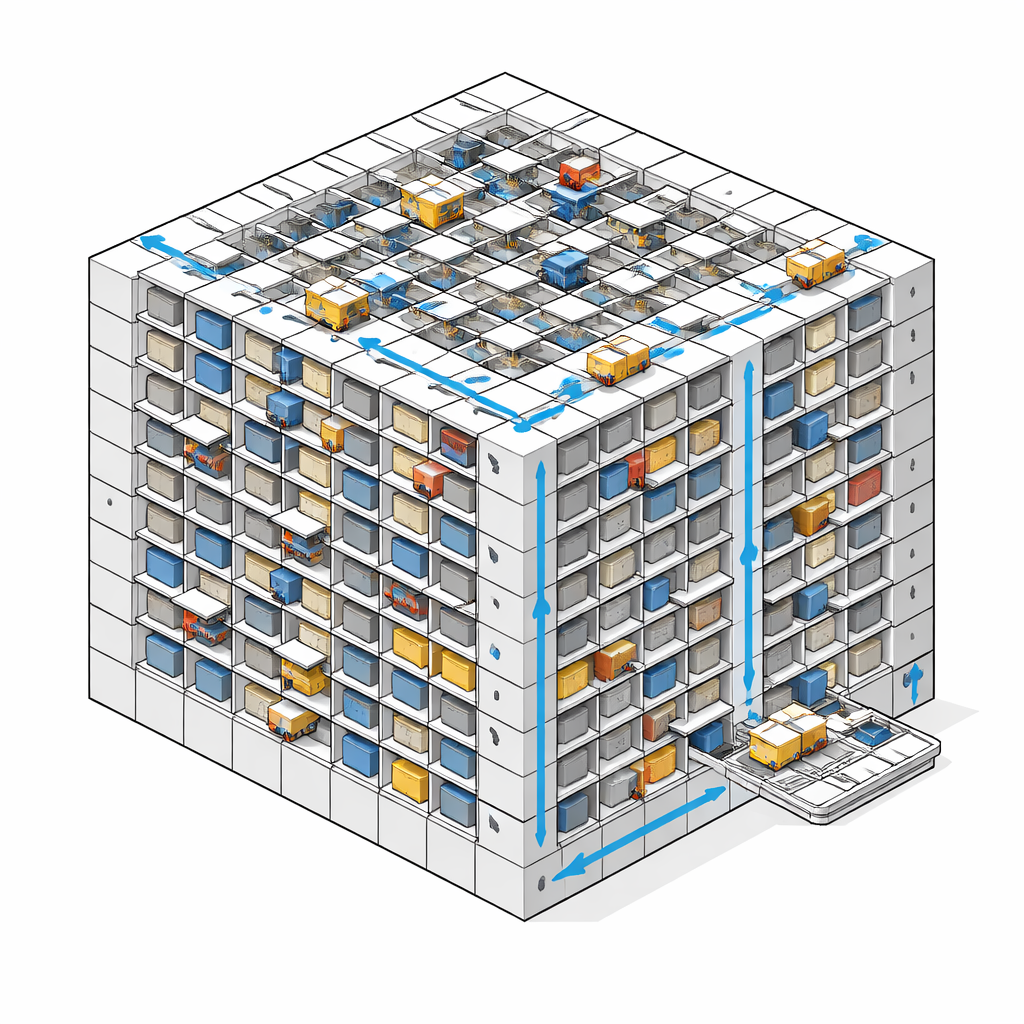
Tradycyjne magazyny poświęcają do 40% powierzchni pod stałe alejki, aby ciężarówki lub wózki mogły przejechać między regałami. Systemy magazynowania w układzie łamigłówki przemyślają ten układ na nowo. Towary stoją w zwartej siatce, a zamiast ludzi lub pojazdów pokonujących duże odległości, regały przesuwają się wokół pustej przestrzeni „eskorta”, podobnie jak kafelki w klasycznej 15‑elementowej łamigłówce przesuwanej. Ten układ bez alejek może zmieścić o 30–50% więcej przedmiotów na tym samym obszarze. Badanie rozwija tę ideę i wyobraża sobie taką łamigłówkę rozciągniętą w sześcian: regały ułożone na kilku poziomach, z autonomicznymi robotami‑shuttle przenoszącymi ładunki na boki oraz w górę i w dół.
Dodanie brakującego trzeciego wymiaru
Większość wcześniejszych badań traktowała te systemy w stylu łamigłówki jako płaskie. Przedmioty przesuwano na północ, południe, wschód lub zachód, podczas gdy wszelki ruch pionowy — np. za pomocą windy — był traktowany osobno lub pomijany w optymalizacji. Prawdziwe magazyny coraz częściej przypominają jednak trójwymiarowe labirynty, a ich roboty muszą koordynować ruchy we wszystkich kierunkach. Autorzy wskazują to jako krytyczną lukę: nie istnieje matematyczny model optymalizujący pobieranie w pełni 3D siatce łamigłówkowej, w której shuttle’y mogą poruszać się w sześciu kierunkach i muszą unikać blokowania się lub kolizji między poziomami. Ich praca wprowadza pierwszy taki zintegrowany model, którego celem jest zminimalizowanie liczby pojedynczych ruchów potrzebnych, by wszystkie żądane przedmioty doprowadzić do jednego punktu wejścia/wyjścia.
Przekształcanie złożonego magazynu w równania
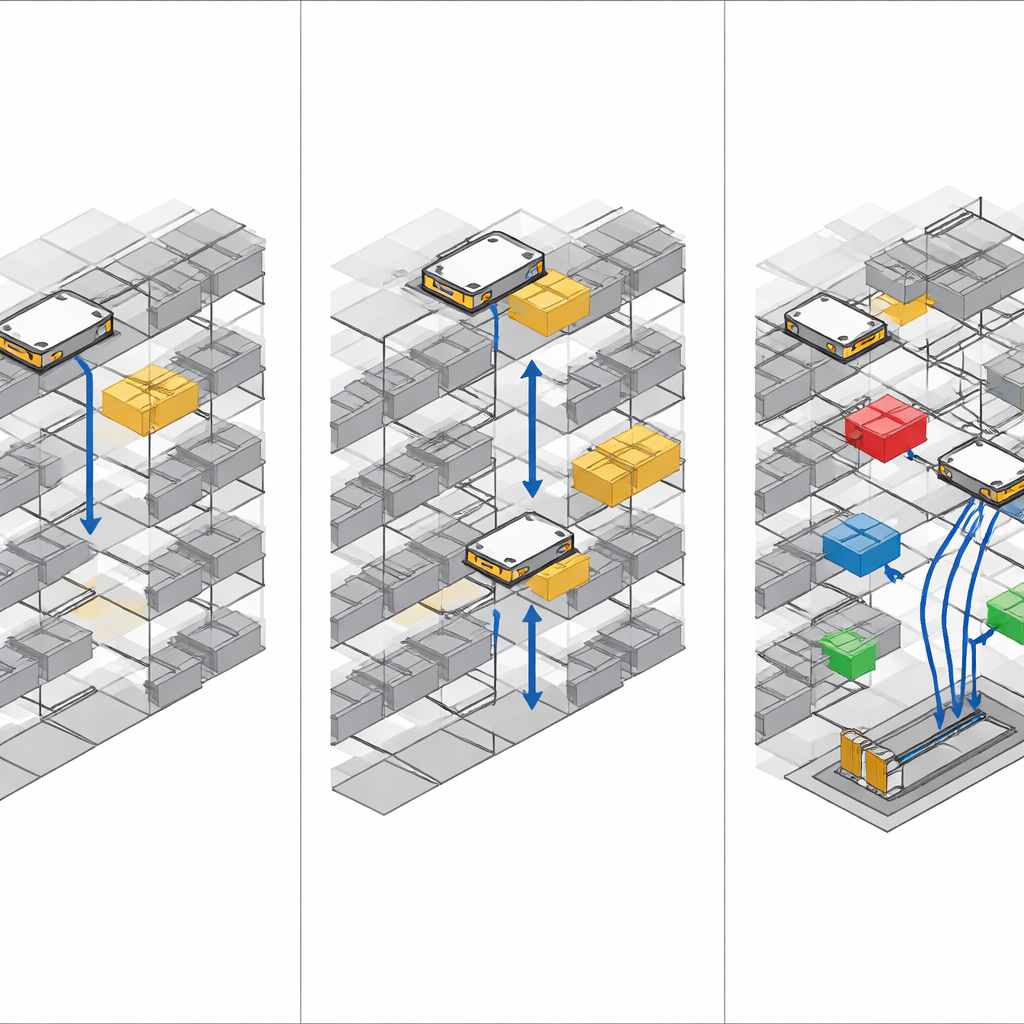
Aby uchwycić zachowanie magazynu, badacze opisują go jako siatkę pozycji w przestrzeni i serię kroków czasowych. Binarne zmienne decyzyjne rejestrują, czy dany shuttle lub przedmiot przemieszcza się z jednej komórki do sąsiadującej — poziomo lub pionowo — w danym czasie. Ograniczenia wymuszają reguły zdrowego rozsądku: dwa shuttle’y lub przedmioty nie mogą zajmować tej samej komórki jednocześnie; przedmioty mogą się przesuwać tylko wtedy, gdy są przewożone przez shuttle’y; przepływy muszą być ciągłe od początku do końca; a żądane przedmioty muszą ostatecznie dotrzeć do punktu odbioru w rogu sześcianu. Cel ogólny jest prosty do sformułowania, lecz trudny do obliczenia: zminimalizować całkowitą liczbę ruchów wszystkich shuttle’y i przedmiotów razem. Ponieważ problem ten uogólnia kilka znanych trudnych zagadnień z badań operacyjnych, jego dokładne rozwiązanie staje się niemożliwe, gdy tylko magazyn przekracza skromne rozmiary.
Hybrydowe wyszukiwanie: łączenie inteligentnych zgadek z dokładnymi sprawdzeniami
Aby okiełznać tę złożoność, autorzy opracowali hybrydową heurystykę nazwaną ALNS‑IP. Zaczyna się od zachłannego planu, który przypisuje każdy żądany przedmiot pobliskiemu shuttle’owi, a następnie prowadzi oba w stronę punktu odbioru. Procedura adaptacyjnego wyszukiwania dużych sąsiedztw (ALNS) wielokrotnie „niszczy” małe fragmenty tego planu — usuwając jeden lub więcej ruchów z wybranych ścieżek przedmiotów — i „naprawia” je, używając podmodelu programowania całkowitoliczbowego, który egzekwuje wszystkie reguły fizyczne. Z czasem algorytm uczy się, które typy lokalnych zmian zwykle prowadzą do lepszych wyników i faworyzuje je. Obszerne testy na symulowanych, sześciennych magazynach o różnych rozmiarach, gęstościach składowania, poziomach popytu i liczbie shuttle’y pokazują, że podejście to znajduje rozwiązania bardzo bliskie optymalnym w przypadkach małych i średnich oraz plany wykonalne wysokiej jakości nawet wtedy, gdy dokładne solvery wyczerpują pamięć lub czas w większych przypadkach.
Co naprawdę daje ruch pionowy
Kluczowe pytanie brzmi, czy umożliwienie shuttle’om ruchu pionowego oprócz poziomego wart jest dodatkowego wysiłku inżynieryjnego. Porównując swój pełny model 3D z ograniczoną wersją przypominającą starsze, głównie poziome projekty, autorzy pokazują, że zintegrowany ruch pionowy może skrócić liczbę wymaganych ruchów średnio o ponad 10% w małych przypadkach testowych, a w niektórych układach nawet o 40%. Oznacza to, że przedmioty docierają do pracowników lub stacji pakowania szybciej, przy mniejszym ruchu robotów i mniejszych szansach na zatory. Analizy czułości ujawniają również, że samo zwiększenie liczby shuttle’y nie zawsze pomaga — koordynacja staje się trudniejsza — podczas gdy wyższy popyt naturalnie zwiększa liczbę ruchów, ale pozostaje to zarządzalne w ramach proponowanego schematu.
Szerszy obraz: w stronę praktycznych trójwymiarowych magazynów robotycznych
Mówiąc prosto, praca ta pokazuje, jak zaaranżować floty małych robotów w trójwymiarowym magazynie‑łamigłówce tak, aby poruszały się dokładnie tyle, ile potrzeba, i nie więcej, by pobrać to, co zamawiają klienci. Połączenie szczegółowego opisu matematycznego i sprytnego algorytmu wyszukiwania przekształca nierozwiązywalny problem planistyczny w coś, co można rozwiązać wystarczająco szybko, by podejmować realne decyzje projektowe i operacyjne. W miarę jak miejskie magazyny rosną w górę i stają się bardziej zautomatyzowane, takie narzędzia mogą pomóc firmom zdecydować, ile robotów kupić, jak zaprojektować siatki składowania i jak wykorzystać przestrzeń pionową bez spowalniania szybkości pobierania.
Cytowanie: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
Słowa kluczowe: zautomatyzowany magazyn, magazynowanie w układzie łamigłówki, roboty typu shuttle, programowanie całkowitoliczbowe, optymalizacja heurystyczna