Clear Sky Science · pt
Otimização de sistemas de armazenamento em nível múltiplo baseados em quebra‑cabeças com dinâmica horizontal e vertical usando programação inteira e ALNS‑IP
Por que um armazenamento mais inteligente importa no dia a dia
Por trás de cada entrega no mesmo dia e de cada pedido click‑and‑collect há um armazém correndo para localizar, separar e despachar itens em poucos minutos. À medida que as cidades se tornam mais densas e o comércio eletrônico cresce, as empresas precisam acomodar mais mercadorias em menos espaço sem reduzir a velocidade. Este artigo explora um novo tipo de armazém de alta densidade que funciona como um quebra‑cabeça deslizante 3D, junto com um método de planejamento que decide como seus robôs devem se mover. O benefício é um resgate mais rápido, menos movimentos de robôs e sistemas capazes de lidar realisticamente com o volume do e‑commerce moderno.
De corredores e empilhadeiras para quebra‑cabeças deslizantes
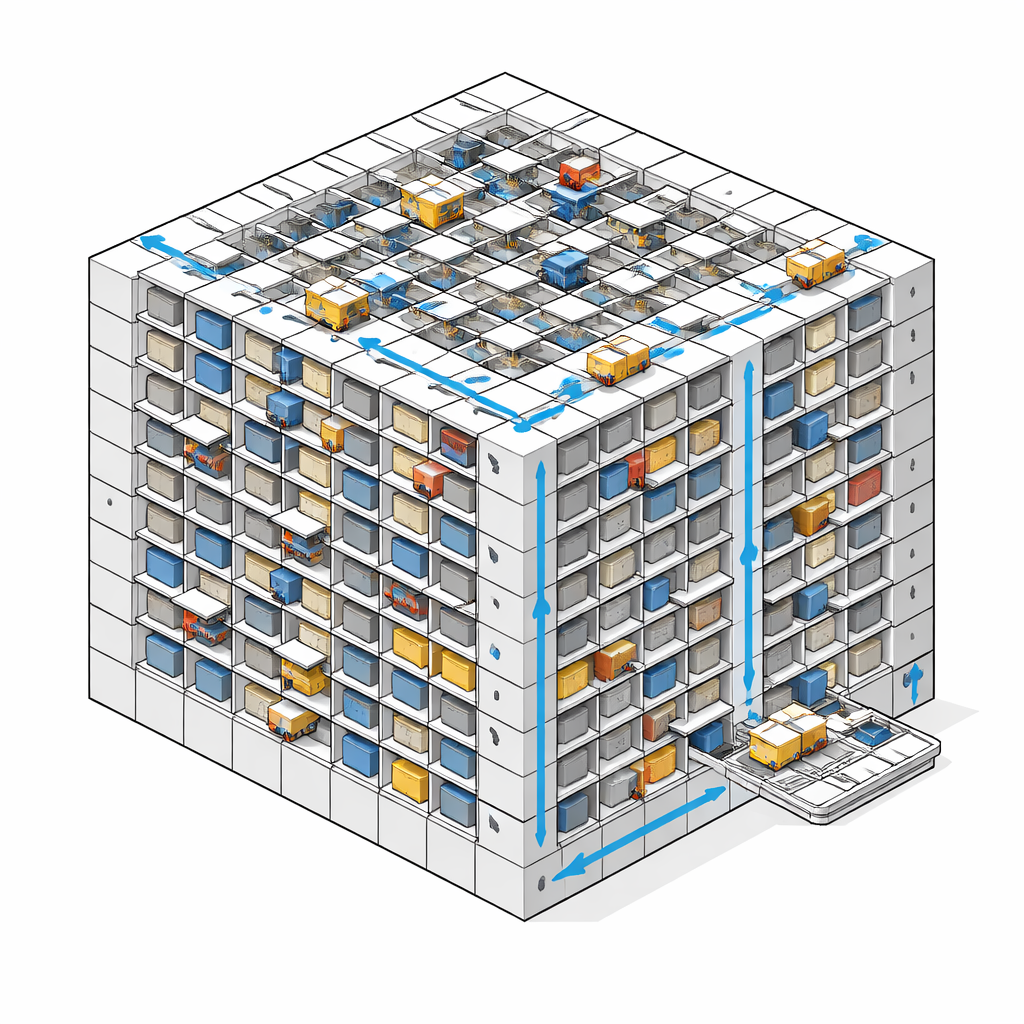
Armazéns convencionais dedicam até 40% de sua área a corredores fixos para que caminhões ou empilhadeiras possam circular entre as prateleiras. Sistemas de armazenamento baseados em quebra‑cabeças repensam esse arranjo. Os produtos ficam em uma grade compacta e, em vez de pessoas ou veículos percorrendo longas distâncias, as próprias estantes deslocam‑se ao redor de um espaço vazio de "escolta", como as peças do clássico quebra‑cabeça deslizante de 15 peças. Esse desenho sem corredores pode acomodar 30–50% mais itens na mesma área. O estudo parte dessa ideia e imagina o quebra‑cabeça estendido a um cubo: racks empilhados em vários níveis, com robôs shuttle autônomos movendo cargas tanto lateralmente quanto para cima ou para baixo.
Acrescentando a terceira dimensão que faltava
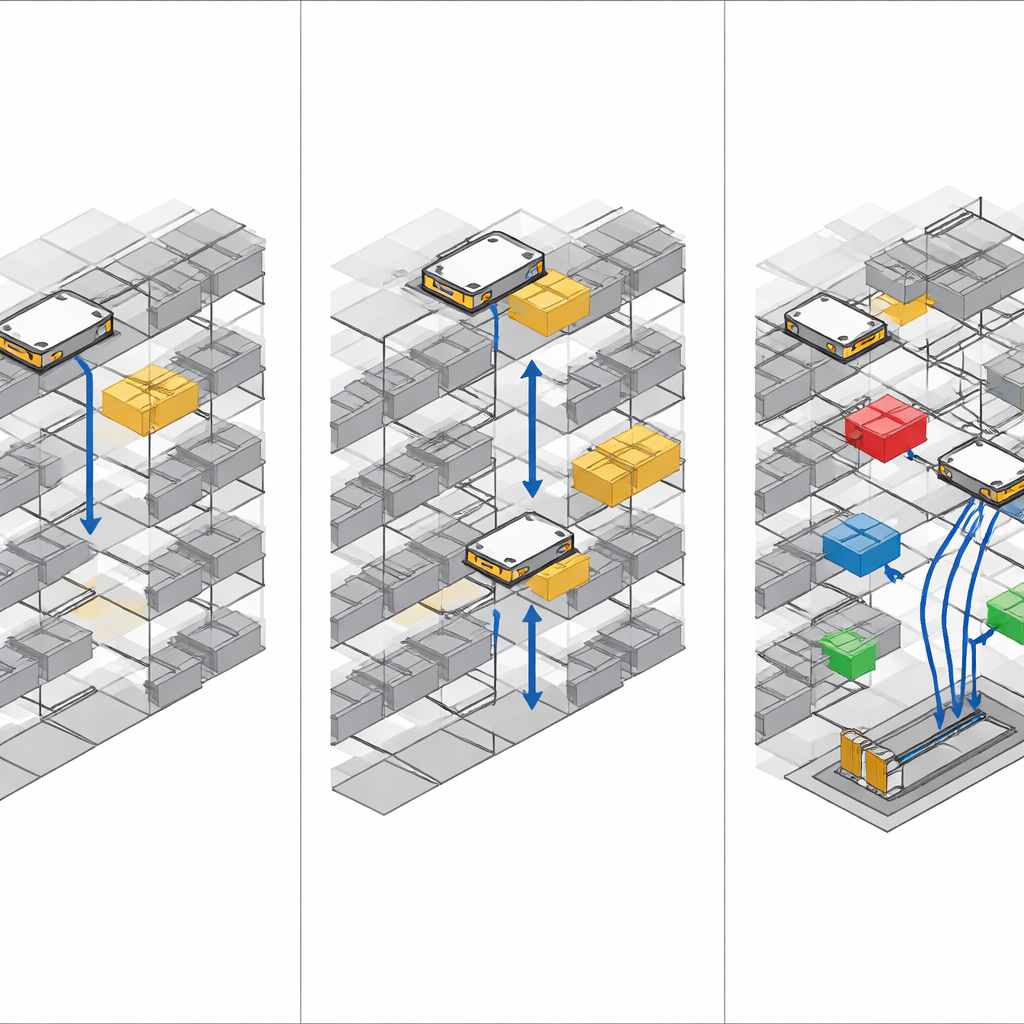
A maior parte das pesquisas anteriores tratou esses sistemas estilo quebra‑cabeça como planos. Os itens deslizavam para norte, sul, leste ou oeste, enquanto qualquer movimento vertical — como um elevador — era tratado separadamente ou ignorado na otimização. Armazéns reais, contudo, cada vez mais se parecem com labirintos tridimensionais, e seus robôs devem se coordenar em todas as direções. Os autores identificam isso como uma lacuna crítica: não existe até então um modelo matemático que otimize a retirada em uma grade de quebra‑cabeça 3D completa, onde os shuttles podem se mover em seis direções e precisam evitar bloqueios ou colisões entre níveis. O trabalho apresenta o primeiro modelo integrado desse tipo, com o objetivo de minimizar quantos movimentos individuais são necessários para levar todos os itens solicitados a um único ponto de entrada/saída.
Transformando um armazém complexo em equações
Para capturar o comportamento do armazém, os pesquisadores o descrevem como uma grade de posições no espaço e uma série de passos no tempo. Variáveis de decisão binárias registram se um determinado shuttle ou item se move de uma célula para uma célula vizinha — horizontal ou verticalmente — em um dado instante. Restrições impõem regras de bom senso: nenhum dois shuttles ou itens podem ocupar a mesma célula ao mesmo tempo; itens só se movem quando carregados por shuttles; os fluxos devem ser contínuos do começo ao fim; e os itens solicitados devem, eventualmente, chegar ao ponto de retirada no canto do cubo. O objetivo global é simples de enunciar, mas difícil de computar: minimizar o número total de movimentos de shuttles e itens combinados. Como esse problema generaliza vários problemas notoriamente difíceis em pesquisa operacional, resolvê‑lo exatamente torna‑se impossível assim que o armazém cresce além de um tamanho modesto.
Busca híbrida: misturando palpites inteligentes com verificações exatas
Para domar essa complexidade, os autores projetam uma heurística híbrida chamada ALNS‑IP. Ela começa com um plano guloso que atribui cada item desejado a um shuttle próximo e então roteia ambos em direção ao ponto de retirada. Um procedimento de busca em grande vizinhança adaptativa (ALNS) repetidamente "destrói" pequenas partes desse plano — removendo um ou mais movimentos de caminhos de itens selecionados — e as "repara" usando um submodelo de programação inteira que impõe todas as regras físicas. Com o tempo, o algoritmo aprende quais tipos de alterações locais tendem a produzir melhores resultados e as privilegia. Testes extensivos em armazéns simulados em forma de cubo de diferentes tamanhos, densidades de armazenamento, níveis de demanda e número de shuttles mostram que essa abordagem encontra soluções muito próximas do ótimo em casos pequenos e médios, e planos factíveis de alta qualidade mesmo quando solucionadores exatos ficam sem memória ou tempo em casos maiores.
O que o movimento vertical realmente traz
Uma questão central é se permitir que shuttles se movam verticalmente além do movimento horizontal compensa o esforço de engenharia adicional. Ao comparar seu modelo 3D completo com uma versão restrita que imita designs antigos, majoritariamente horizontais, os autores mostram que o movimento vertical integrado pode reduzir o número de movimentos necessários em mais de 10% em média em testes pequenos, e em até 40% em alguns arranjos. Isso significa que os itens chegam mais rápido aos operadores ou às estações de embalagem, com menos tráfego de robôs e menos oportunidades de congestionamento. Análises de sensibilidade também revelam que simplesmente adicionar mais shuttles nem sempre ajuda — a coordenação se torna mais difícil — enquanto uma demanda maior naturalmente aumenta o número de movimentos, mas permanece manejável dentro do arcabouço proposto.
Visão ampla: rumo a armazéns robóticos 3D práticos
Em termos simples, este trabalho mostra como coreografar frotas de pequenos robôs em um armazém quebra‑cabeça tridimensional para que façam somente os movimentos necessários — e nada além — para buscar o que os clientes pedem. A combinação de uma descrição matemática detalhada e um algoritmo de busca inteligente transforma um problema de planejamento intratável em algo que pode ser resolvido com rapidez suficiente para decisões reais de projeto e operação. À medida que armazéns urbanos se tornam mais altos e automatizados, tais ferramentas podem ajudar empresas a decidir quantos robôs comprar, como dispor suas grades de armazenamento e como explorar o espaço vertical sem comprometer a velocidade de retirada.
Citação: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
Palavras-chave: armazém automatizado, armazenamento baseado em quebra‑cabeças, robôs shuttle, programação inteira, otimização heurística