Clear Sky Science · tr
Yatay ve dikey dinamikleri olan çok katmanlı bulmaca tabanlı depolama sistemlerinin tamsayılı programlama ve ALNS-IP ile optimizasyonu
Neden daha akıllı depolama günlük yaşam için önemli
Aynı gün teslimatların ve tıklayıp teslim alma siparişlerinin arkasında, ürünleri dakikalar içinde bulup, seçip ve göndermek için yarışan bir depo vardır. Şehirler yoğunlaştıkça ve çevrimiçi alışveriş arttıkça, şirketler hızı düşürmeden daha fazla ürünü daha az alana sığdırmak zorunda. Bu makale, 3B kayan bulmaca gibi çalışan yeni bir yüksek yoğunluklu depo türünü ve robotların nasıl hareket etmesi gerektiğine karar veren bir planlama yöntemini inceliyor. Sonuç: daha hızlı erişim, daha az robot hareketi ve modern e-ticaretin yükünü gerçekçi şekilde karşılayabilen sistemler.
Sıralardan ve forkliftlerden kayan bulmacalara
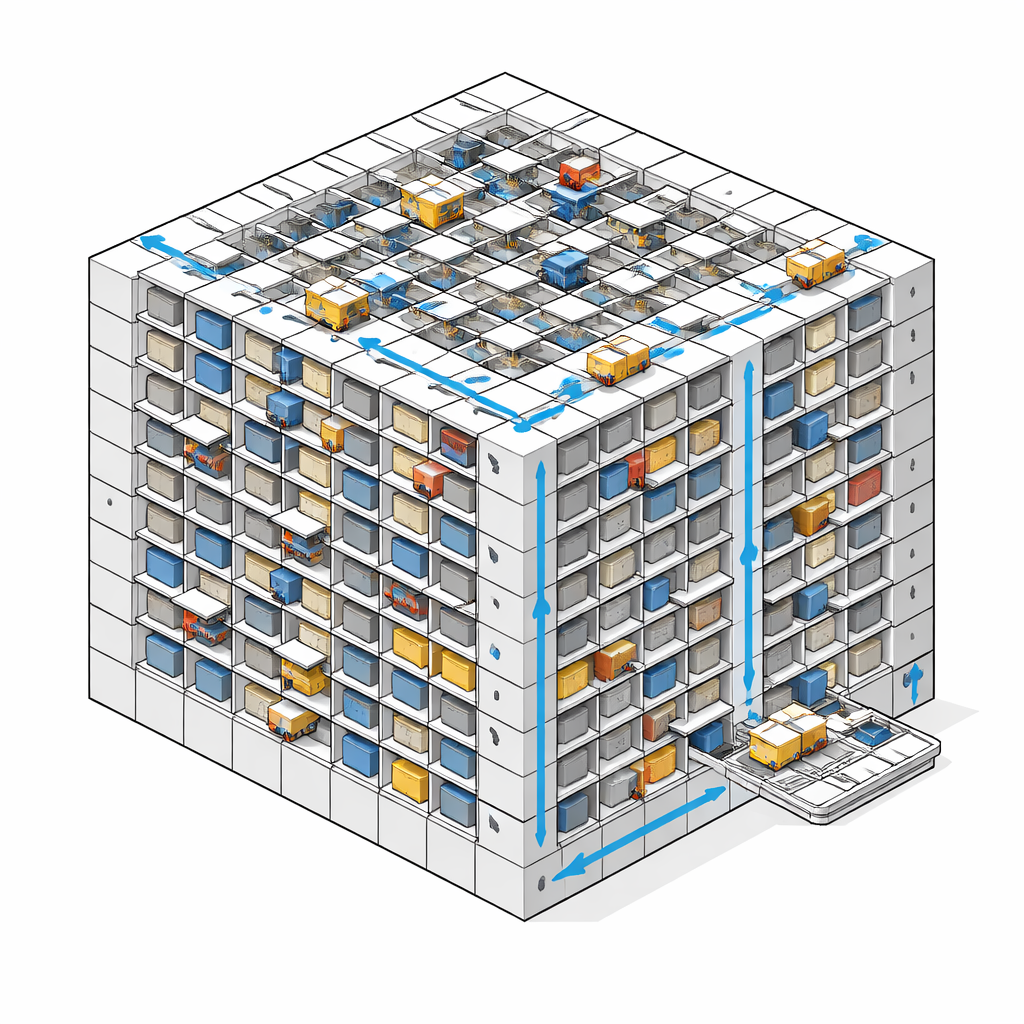
Geleneksel depoların zeminlerinin %40’ına kadarını sabit koridorlara ayırması şaşırtıcı değil; kamyon veya forkliftlerin raflar arasında ilerleyebilmesi gerekiyor. Bulmaca‑tabanlı depolama sistemleri bu düzeni yeniden düşünüyor. Mallar sıkışık bir ızgarada duruyor ve insan veya araçların uzun mesafeler katetmesi yerine, raflar boş bir “eşlikçi” alan etrafında klasik 15 parçalık kayan bulmaca taşları gibi hareket ediyor. Koridorsuz bu tasarım aynı alana %30–50 daha fazla ürün sığdırabiliyor. Çalışma bu fikri temel alıp bunu bir küpe genişletiyor: birden fazla seviyede üst üste istiflenmiş raflar ve yükleri hem yatay hem de dikey olarak taşıyan otonom shuttle robotlar.
Eksik üçüncü boyutu eklemek
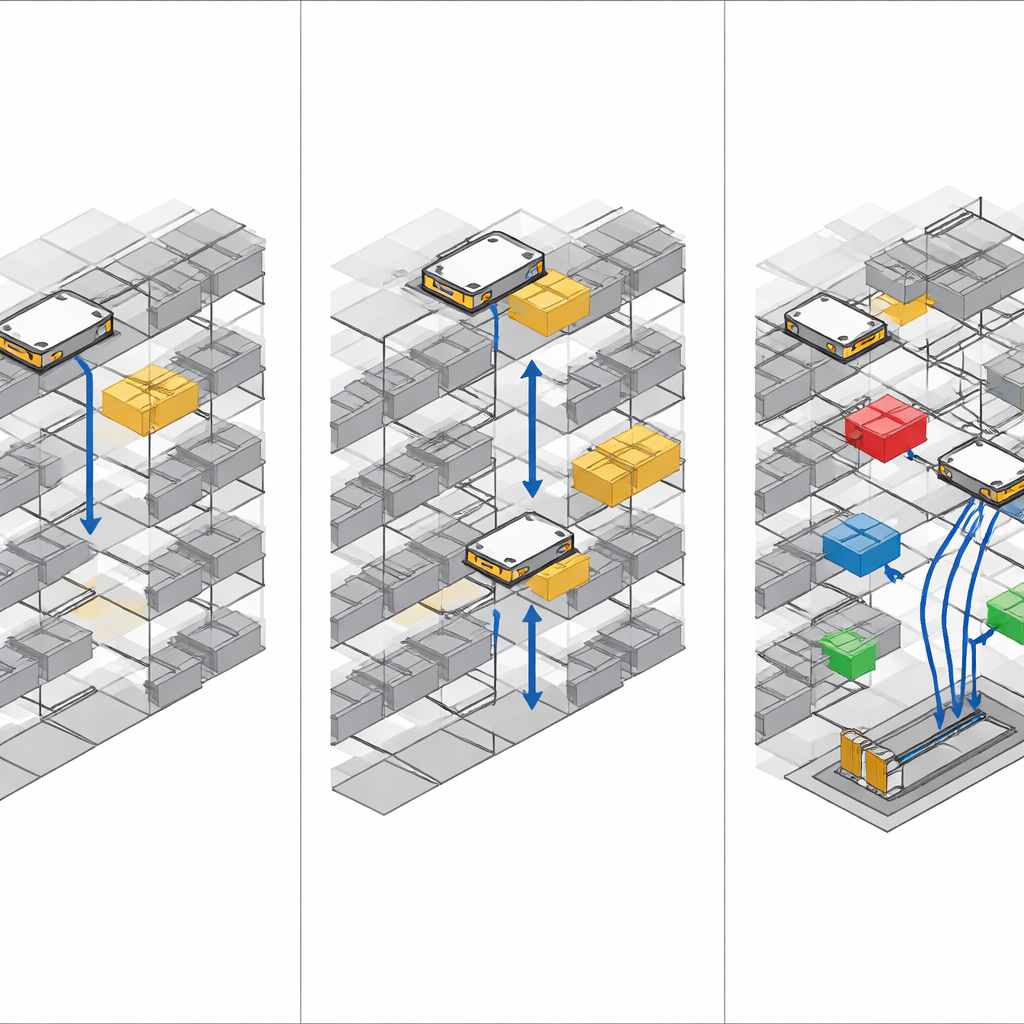
Önceki araştırmaların çoğu bu bulmaca tarzı sistemleri düzlemde ele aldı. Öğeler kuzey, güney, doğu veya batıya kayarken, dikey hareketler—örneğin asansör—genellikle ayrı ele alındı veya optimizasyonda görmezden gelindi. Oysa gerçek depolar giderek üç boyutlu labirentlere benziyor ve robotlar her yönde koordinasyon kurmak zorunda. Yazarlar bunu kritik bir boşluk olarak tanımlıyor: mevcut herhangi bir matematiksel model, shuttloların altı yönde hareket edebildiği ve çok katmanlı yapı boyunca birbirlerini engellemekten veya çarpışmaktan kaçınmak zorunda olduğu tam 3B bulmaca ızgarasında erişimi optimize etmiyor. Çalışma, tüm istenen öğelerin tek bir giriş/çıkış noktasına getirilmesi için gereken bireysel hareket sayısını en aza indirmeyi amaçlayan ilk entegre modeli sunuyor.
Karmaşık bir depoyu denklemlere dönüştürmek
Deponun davranışını yakalamak için araştırmacılar onu uzaydaki pozisyonlardan oluşan bir ızgara ve bir dizi zaman adımı olarak tanımlıyor. İkili karar değişkenleri, belirli bir shuttle’ın veya öğenin belli bir zamanda bir hücreden komşu bir hücreye—yatay veya dikey—hareket edip etmediğini kaydediyor. Kısıtlar sağduyulu kuralları uyguluyor: aynı anda iki shuttle veya öğe aynı hücrede olamaz; öğeler yalnızca shuttle’lar tarafından taşındığında hareket edebilir; akış başlangıçtan sona kadar süreklilik göstermeli; ve istenen öğeler sonunda küpün köşesindeki alım noktasına ulaşmalı. Genel amaç ifade etmesi basit ama hesaplaması zor: tüm shuttle ve öğe hareketlerinin toplam sayısını en aza indirmek. Bu problem işletme araştırmalarında zorlu birçok problemi genellediği için depo mütevazı bir büyüklüğü aştığında tam olarak çözmek imkânsızlaşıyor.
Hibrit arama: akıllı tahminleri kesin kontrollerle karıştırmak
Bu karmaşıklığı dizginlemek için yazarlar ALNS‑IP adında hibrit bir sezgisel yöntem geliştiriyor. Yöntem, her istenen öğeyi yakın bir shuttle’a atayan ve ardından her ikisini alım noktasına yönlendiren açgözlü bir planla başlıyor. Uyarlanabilir büyük komşuluk arama (ALNS) prosedürü daha sonra bu planın küçük kısımlarını tekrar tekrar “yok ediyor”—seçilmiş öğe yollarından bir veya daha fazla hareketi çıkararak—ve fiziksel tüm kuralları uygulayan tamsayılı programlama alt modelini kullanarak bunları “onarıyor”. Zamanla algoritma hangi tür yerel değişikliklerin daha iyi sonuçlar ürettiğini öğrenip onlara öncelik veriyor. Farklı boyutlarda, depolama yoğunluklarında, talep seviyelerinde ve shuttle sayılarında küp biçimli simüle depolarda yapılan kapsamlı testler, bu yaklaşımın küçük ve orta ölçekli durumlarda optimuma çok yakın çözümler bulduğunu ve daha büyük olaylarda kesin çözücüler bellek veya süre aşımlarına uğradığında bile yüksek kaliteli fizibil planlar ürettiğini gösteriyor.
Dikey hareketin gerçek faydası nedir
Ana soru şudur: shuttle’ların yatayın yanı sıra dikey hareket etmesine izin vermek ek mühendisliğe değiyor mu? Tam 3B modellerini daha çok yatay tasarımları taklit eden kısıtlı bir versiyonla karşılaştırarak yazarlar, entegre dikey hareketin küçük test vakalarında gereken hareket sayısını ortalamada %10’dan fazla, bazı düzenlerde ise %40’a varan oranlarda azaltabileceğini gösteriyor. Bu, öğelerin çalışanlara veya paketleme istasyonlarına daha hızlı ulaşması, daha az robot trafiği ve daha az tıkanma fırsatı anlamına geliyor. Duyarlılık analizleri ayrıca sadece daha fazla shuttle eklemenin her zaman fayda sağlamadığını—koordinasyonun zorlaştığını—ve daha yüksek talebin doğal olarak hareket sayısını artırdığını ancak önerilen çerçeve içinde yönetilebilir kaldığını ortaya koyuyor.
Büyük resim: pratik 3B robot depolarına doğru
Basitçe söylemek gerekirse, bu çalışma üç boyutlu kayan bulmaca deposunda küçük robot filolarını, müşterilerin sipariş ettiklerini almak için tam olarak gereken kadar hareket ettirecek şekilde nasıl senkronize edileceğini gösteriyor. Ayrıntılı bir matematiksel tanım ile akıllı bir arama algoritmasının kombinasyonu, çözülemeyecek kadar zor bir planlama sorununu gerçek tasarım ve operasyon kararları için yeterince hızlı çözülebilir hale getiriyor. Kentsel depolar daha yüksek ve daha otomatik hale geldikçe, bu tür araçlar şirketlerin kaç robot alacaklarına, depolama ızgaralarını nasıl düzenleyeceklerine ve dikey alanı erişim hızını düşürmeden nasıl kullanacaklarına karar vermelerine yardımcı olabilir.
Atıf: Al jneid, R., Yiğit, V. & Keskin, M.E. Optimizing multi-level shuttle-based puzzle storage systems with horizontal and vertical dynamics using integer programming and ALNS-IP. Sci Rep 16, 13117 (2026). https://doi.org/10.1038/s41598-026-40383-z
Anahtar kelimeler: otomatik depolama, bulmaca tabanlı depolama, şuttle robotlar, tamsayılı programlama, sezgisel optimizasyon