Clear Sky Science · zh
一种用于垂直农业系统中处理多样叶菜的柔顺可变形抓手
为什么温柔的机器人对你的沙拉很重要
随着城市探索在本地生产更多食品的方式,垂直农场——室内层叠的叶菜——正成为城市食物供应的重要组成部分。然而,这些高科技农场中的很多采收工作仍然依赖人工,尤其是对易瘀伤的生菜和亚洲叶菜而言。本文介绍了一种专门为温和而可靠地处理此类脆弱蔬菜而设计的新型机器人抓手,为更经济、更有弹性的本地食物生产铺平了道路。
在狭小空间向上种植
在新加坡等土地稀缺的地区,垂直农业系统将作物摆放在多层托盘上,通过精确控制光、水和养分来种出均匀、外观良好的绿叶菜。为了最大化产量,每层托盘上的植物会允许生长到叶片相互接触、几乎覆盖表面。这样的拥挤有利于产量,但对机械不利:传统抓手几乎没有空间从植物之间挤进去,笨拙的操作会撕裂叶片、缩短货架期并传播污染。人工工人会通过为不同作物改变工具和手部动作来适应,但这让采收劳动密集、成本高且难以规模化。
按需改变形状的指尖
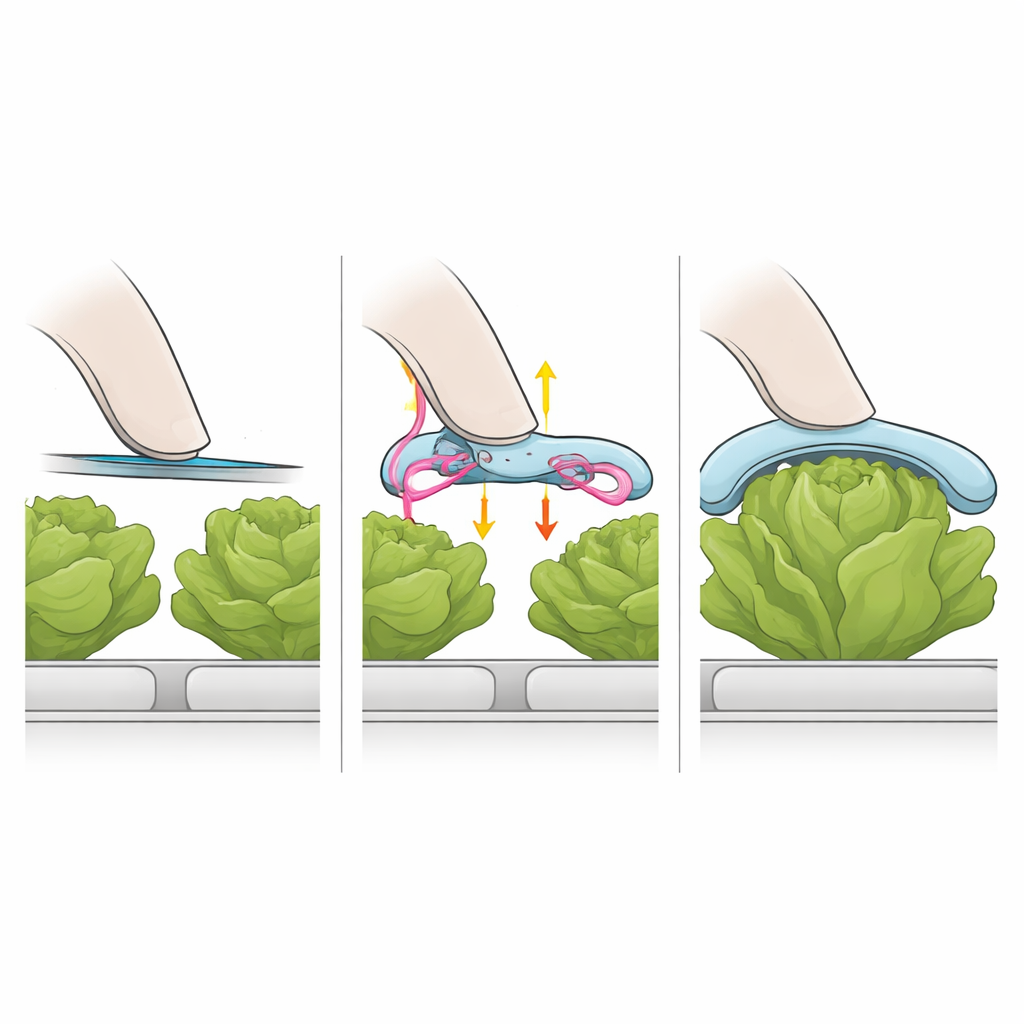
研究人员开发了一种两指机器人抓手,其指尖可根据任务改变形状。在“收拢”状态下,指尖细而扁,能够滑入相邻生菜植株之间的窄缝。一旦到位,隐藏的拉线拉动每个手指内部的可动脊柱,拉伸一块柔性薄片,使其向外弯曲成柔软的弓形垫。这个扩展的垫面提供了宽阔、缓冲的接触面,能温和地贴合植物。通过旋转手指并调整指距,同一抓手既可从侧面捏持,也可从下方舀起,像一双小心的手那样部分包裹住植株。
测试柔和触感与稳固抓持如何兼容
为确保指尖既柔和又有足够强度,团队进行了系列台架实验。他们测量了随着内部脊柱伸长柔性薄片的弯曲程度,以及扩展后的指尖在不同压入深度和角度下施加的力。这些测试表明,指尖在小压缩量下仍保持柔软——这对避免瘀伤很重要——但在较大推动力下仍能抵抗,而不会将突发载荷传回电机。研究人员使用3D打印球体模拟生菜头,进而探究手指旋转和间距如何影响抓手的最大持重。他们发现,通过调整几何形状以避免尖锐边缘接触并将接触力分散到较大面积,抓手能在限制“蔬菜”变形的同时举起更重的目标。
从实验台到真正的农田行列
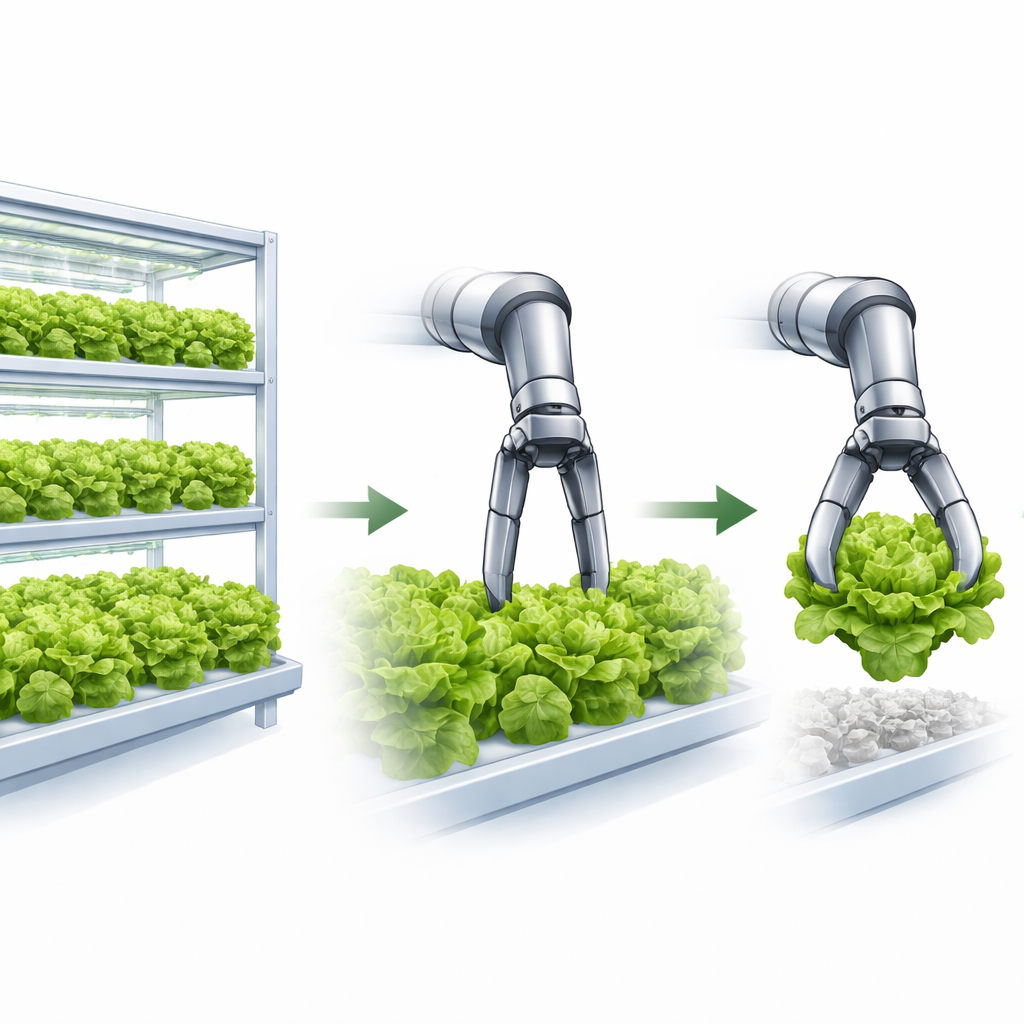
真正的考验在于一家运行中的垂直农场,抓手在那儿处理了多种叶菜:球生菜、nai bai(菜心)、小白菜、芥蓝和羽衣甘蓝。对于球状的生菜,抓手采用较小的指角和较宽的间距,从下方舀起并夹持住菜头,稳固地固定而不擦伤邻近植株。对于茎较高、呈伞状的绿叶菜,手指则旋转得更大以到达叶冠下方或围绕茎部,并调整捏合距离以适应植株尺寸。在反复试验中,该系统成功抓取并举起所有测试植物且未见可见损伤或打滑,即便根部偏心或植株形状各异。研究人员还演示了完整的收获流程:相机识别可采收的生菜,机器人摘取并传送到定制的根部修剪站,然后将修剪好的菜头转移到收集点。
走向全自动化绿菜的下一步
这项研究表明,具有可变形柔软指尖的抓手可以弥合脆弱植物与刚性机器之间的差距,在拥挤的室内农场中为不同叶菜提供温和且稳定的处理。对非专业读者而言,核心结论是:机器人在处理食物时不必再笨拙——通过让它们的“指尖”改变形状,它们可以滑入狭小空间,几乎像人工工人一样小心地托起每株植物。作者指出,要达到商业化速度仍需改进,例如更智能的视觉系统、自动调节指角、更好的打滑检测以及符合卫生要求的设计。不过,这项工作仍标志着朝向保护作物并维护最终送上你餐盘的沙拉品质的全自动采收迈出的实用第一步。
引用: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
关键词: 垂直农业, 软体机器人, 叶菜类蔬菜, 机器人采收, 农业自动化