Clear Sky Science · ja
垂直農業システムでさまざまな葉物野菜を扱うための順応性を持つ形状変化グリッパー
サラダのために優しいロボットが重要な理由
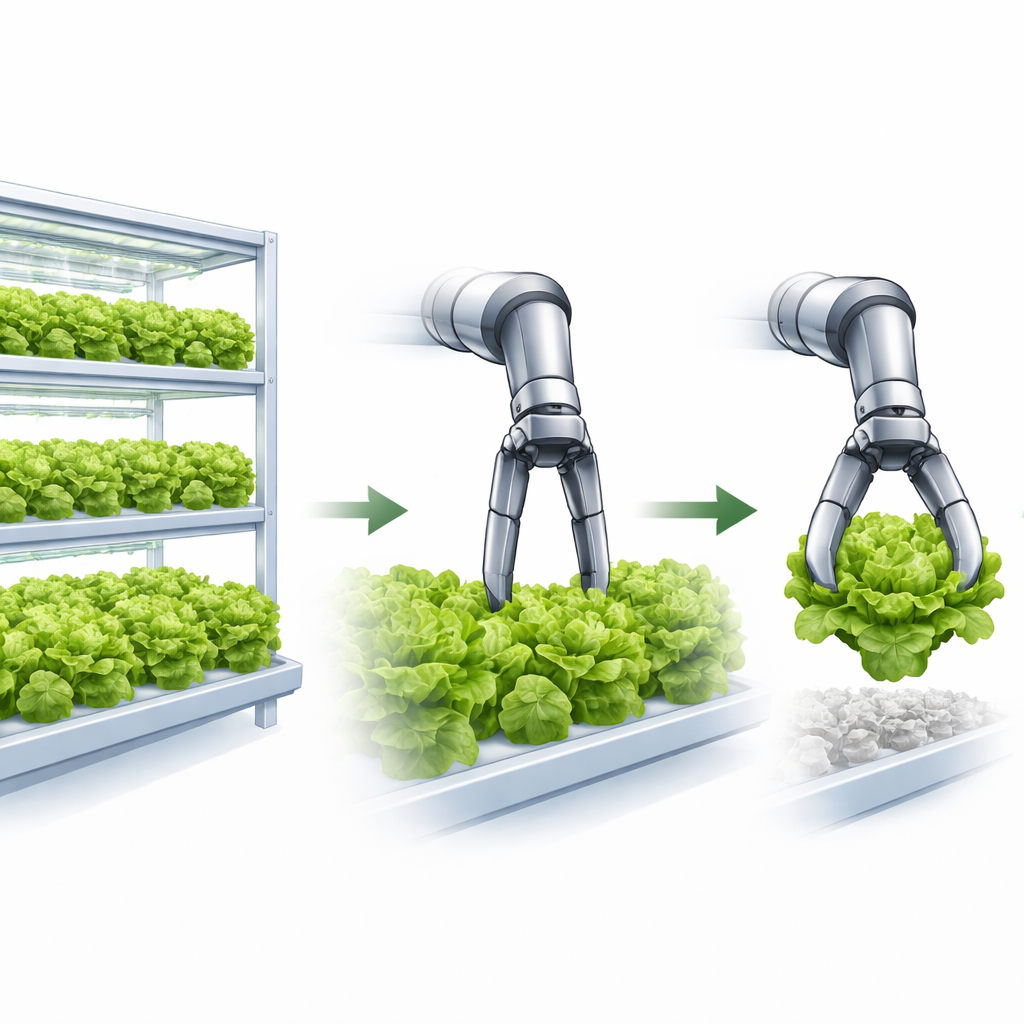
都市が食料をより身近で生産する方法を模索する中、葉物野菜を積み重ねて栽培する屋内の垂直農場は都市の食料供給において重要な存在になりつつあります。しかし、こうしたハイテク農場でも収穫の多くは依然として手作業で行われており、葉が傷つきやすいレタスやアジア系野菜などの繊細な作物が特に手間を要します。本論文は、そうした壊れやすい野菜を慎重かつ確実に扱うために設計された新しいタイプのロボットグリッパーを紹介しており、手頃で強靭な地域食糧生産への道を開きます。
狭い空間で上へ伸ばす農業
シンガポールのような土地の乏しい場所では、垂直農業システムはトレイを段に重ねて作物を密に配置し、統制された光・水・栄養で均一で魅力的な葉物を育てます。生産量を最大化するために、各トレイ上の植物は葉が接触し、表面をほぼ覆うまで育てられます。この混み合いは収量にとっては有利ですが、機械にとっては不利です。従来のグリッパーは植物の間に滑り込む余地がほとんどなく、不器用な扱いは葉を裂き、鮮度を落とし、汚染を広げる可能性があります。人間の作業者は作物ごとに道具や手の動きを変えて適応しますが、これが収穫を労働集約的で高コスト、かつ大規模化しにくいものにしています。
必要に応じて形を変える指先
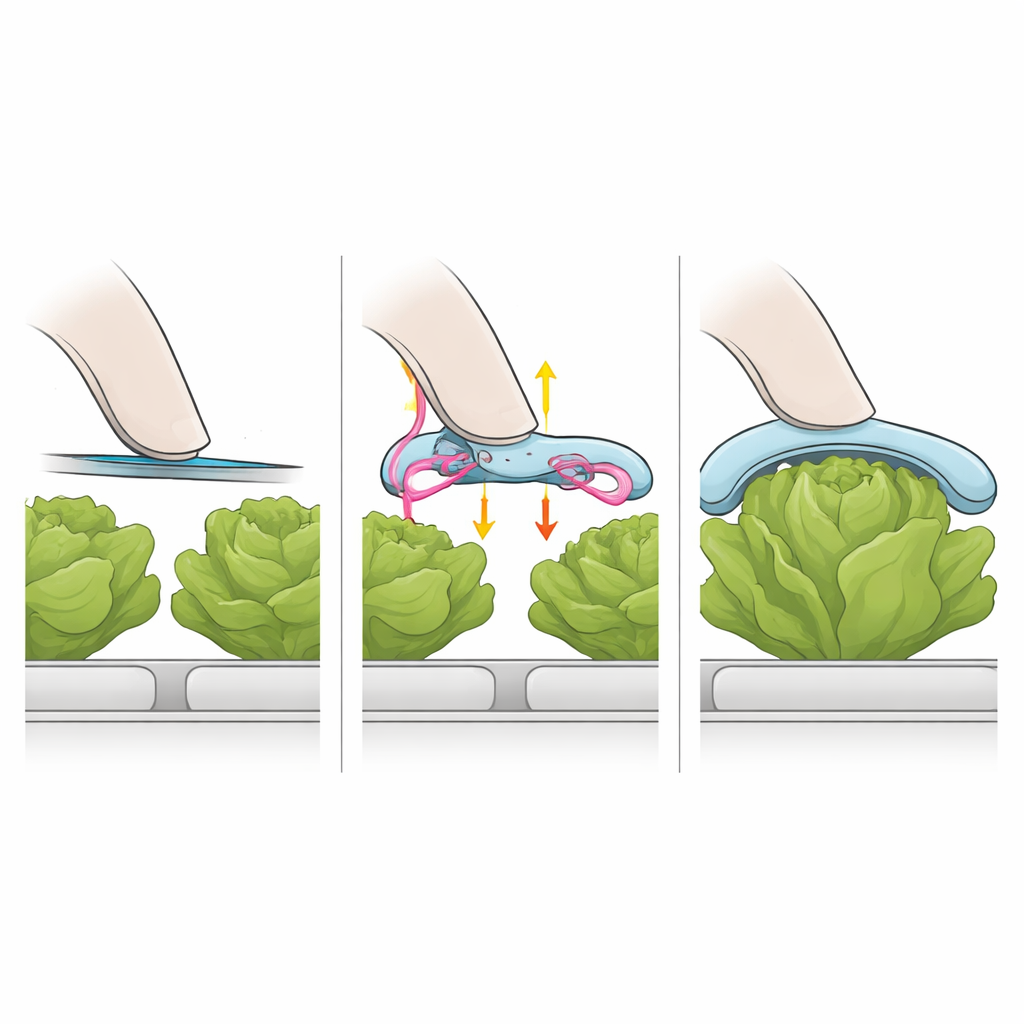
研究者たちは、指先が作業に合わせて形を変えられる二本指のロボットグリッパーを開発しました。指先が「収縮」した状態では細く平らになり、隣接するレタスの頭の間の狭い隙間に滑り込みやすくなります。所定の位置に入ると、隠されたケーブルが各指内部の可動バックボーンを引き、柔軟なシートを引き伸ばして外側に湾曲した柔らかい弓形のパッドを形成します。この拡張したパッドは広くクッション性のある面を提供し、植物に優しくフィットします。指を回転させたり間隔を調整したりすることで、同じグリッパーが側面からつまむか下からすくうかを切り替え、まるで注意深い人の手のように植物を部分的に包み込むことができます。
柔らかい接触と確かな保持のテスト
指先が優しくかつ強くあることを確認するため、チームは一連のベンチトップ実験を行いました。内部バックボーンが伸びるにつれて柔軟シートがどのように曲がるか、拡張した先端が異なる深さや角度で押されたときにどれだけの力を発生するかを測定しました。これらの試験により、指先は小さな圧縮では柔らかさを保ち—打撲を避けるために重要—ながらも、モーターに突然の荷重を返さずに大きな押しに抵抗できることが示されました。レタスの頭の代わりに3Dプリントの球を用いて、指の回転や間隔がグリッパーの保持できる最大重量に与える影響も調べました。鋭いエッジ接触を避け、接触面を広く分散させるよう形状を調整することで、野菜の変形を抑えつつ重い対象をより確実に持ち上げられることが分かりました。
実験台から実際の農場の列へ
本当の試験は稼働中の垂直農場で行われ、グリッパーはクリスタルレタス、ナイバイ、シャオバイツァイ、カイラン、ケールなど複数の葉物作物を扱いました。球形のレタスに対しては、指の角度を控えめにし間隔を広げて頭をすくい上げしっかりとクランプし、隣の植物を擦らないようにしました。茎が高い傘状の葉物では、指をより大きく回転させて葉の天蓋の下や茎の周りに回り込み、植物の大きさに合わせてつまむ距離を調整しました。繰り返しの試行で、根が偏っていたり植物の形が異なったりしても、システムは試験植物を目に見える損傷や滑りなしに把持・持ち上げることに成功しました。研究者たちはまた、カメラが収穫適期のレタスを識別し、ロボットがそれを摘み取ってカスタムの根切りステーションに渡し、切断後の頭部を収集ポイントへ移すという完全な収穫フローも実証しました。
完全自動化された葉物栽培への次の一歩
この研究は、形状を変えられるソフトチップのグリッパーが、繊細な植物と剛体の機械の間をつなぎ、混み合った屋内農場でもさまざまな葉物を優しく安定して扱えることを示しています。一般の読み手に向けた要点は、ロボットはもはや食物を扱うときに不器用である必要はなく、指先を形作ることで狭い場所に滑り込み、人の作業者とほぼ同様に植物を大事に包み込めるということです。著者らは、商業的な速度に到達するためには、より賢いビジョン、自動的な指角度の調整、改良された滑り検出、衛生に配慮した設計などの将来的改良が必要になると述べています。それでも、この成果は収穫対象とサラダとしてあなたの皿に届く品質の両方を守る、完全自動収穫への実用的な第一歩を示しています。
引用: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
キーワード: 垂直農業, ソフトロボティクス, 葉物野菜, ロボット収穫, 農業オートメーション