Clear Sky Science · he
מלהטת קליטה צייתנית לטיפול בירקות עליים מגוונים במערכות חקלאות אנכית
למה רובוטים עדינים חשובים לסלט שלכם
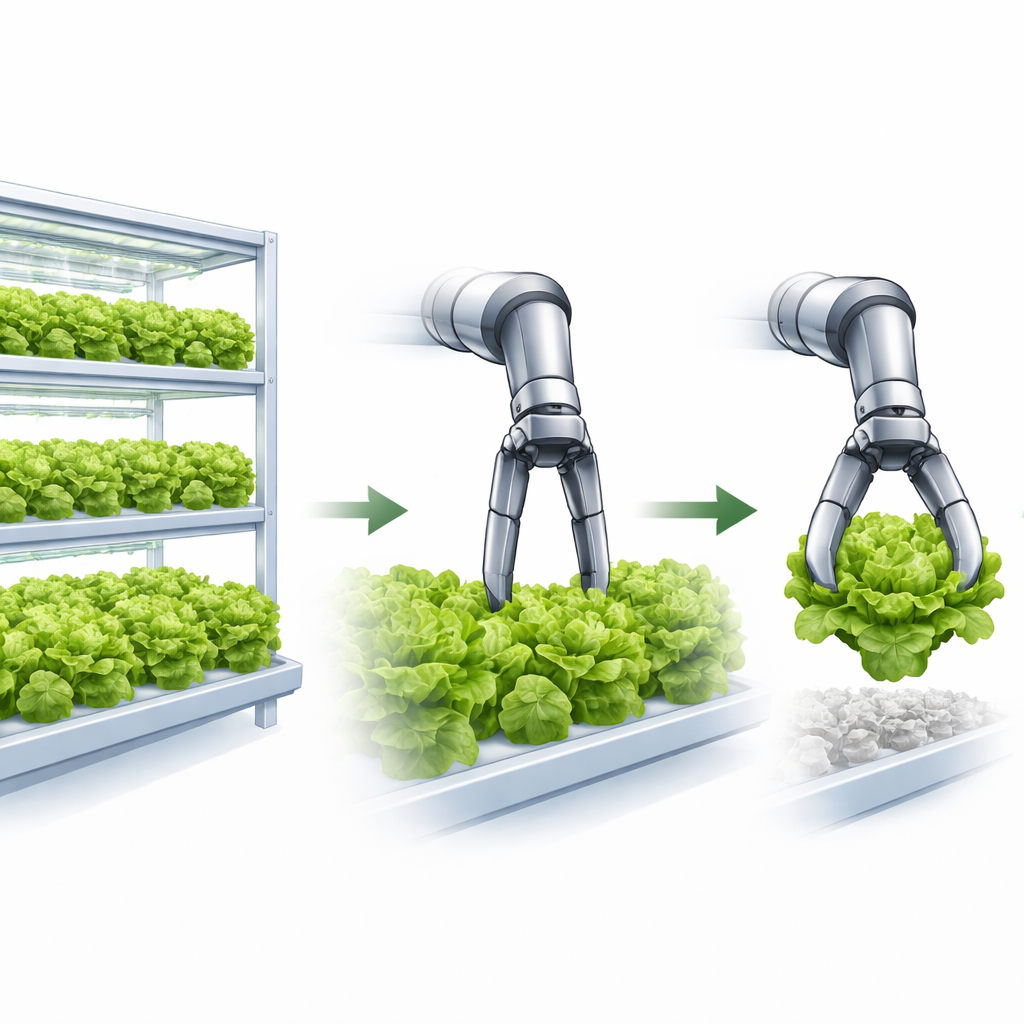
כשערים מחפשות דרכים לגדל יותר מזון קרוב לבית, חוות אנכיות — ערימות פנימיות של עלים ירוקים — הופכות לחלק משמעותי מאספקת המזון העירונית. עם זאת, רוב הקטיף בחוות טכנולוגיות אלה מתבצע עדיין בעבודת יד, במיוחד עבור חסות עדינות וירקות אסייתיים שנדחפים בקלות. מאמר זה מציג סוג חדש של קליטה רובוטית שתוכננה במיוחד כדי לטפל בירקות שבירים אלה בעדינות ובאמינות, ולפתוח את הדרך לייצור מקומי חסכוני ועמיד יותר.
חקלאות כלפי מעלה במרחבים צרים
במקום דל בקרקע כמו סינגפור, מערכות חקלאות אנכית מארגנות גידולים על מדפי רבדים, תוך שימוש בתאורה, מים וחומרים מזינים מבוקרים כדי לגדל עלים אחידים ומושכים. כדי למקסם תפוקה, הצמחים על כל מגש מרחפים מותר להם לצמוח עד שעליהם נוגעים וכמעט מכסים את המשטח. הצפיפות הזו טובה לתפוקה אך בעייתית למכונות: קליטה קונבנציונלית כמעט ואין לה מקום להיכנס בין הצמחים, וטיפול רשלני יכול לקרוע עלים, לקצר את חיי המדף ולהפיץ זיהומים. עובדים אנושיים מסתגלים על ידי שינוי כלים ותנועות יד לכל סוג יבול, אך הדבר הופך את הקטיף לעמוס עבודה, יקר וקשה להרחבה.
קצה אצבע שמשנה צורה לפי הצורך
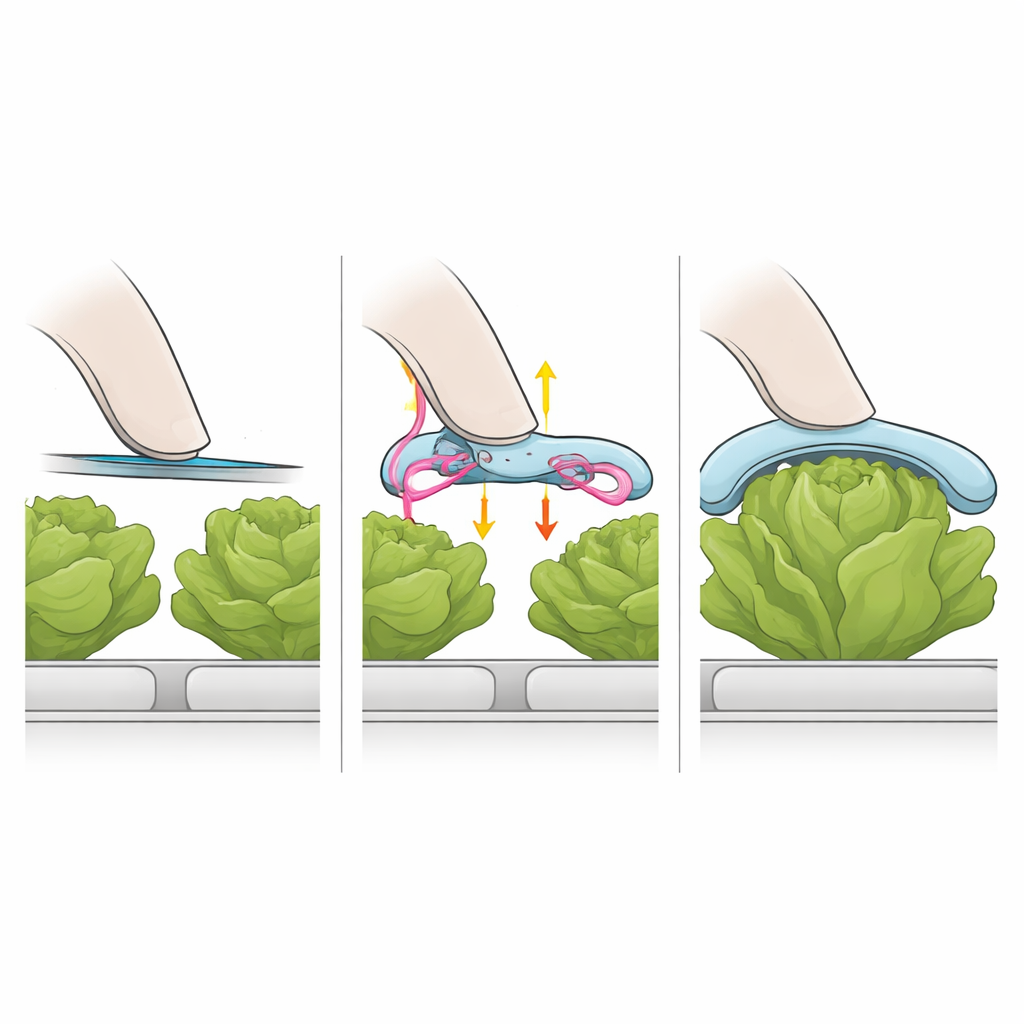
החוקרים פיתחו קליטה רובוטית בעלת שתי אצבעות שבקצותיהן ניתן לשנות את הצורה כדי להתאים למשימה. במצב ה"דחוס" קצות האצבעות דקים ושטוחים, ומסוגלים להחליק אל תוך המרווחים הצרים בין ראשי החסה. לאחר מיקום, כבלים נסתרים מושכים עמוד שדרה נייד בתוך כל אצבע, ומתיחים משטח גמיש שמתעקל החוצה לכיוון כרית רכה בצורת קשת. הכרית המורחבת הזו מספקת משטח רחב ומרופד שמתאים בעדינות לצמח. על ידי סיבוב האצבעות והתאמת המרחק ביניהן, אותה קליטה יכולה ללחוץ מהצדדים או לכפות מהתחתית, ולעטוף חלקית את הצמח כמו זוג ידיים זהירות.
מבחנים של מגע עדין מול אחיזה יציבה
כדי לוודא שהקצה גם עדין וגם חזק, הצוות ערך סדרת ניסויים במעבדה. הם מדדו כיצד המשטח הגמיש התעקל כשהעמוד הפנימי התארך, וכמה כוח הפעיל הקצה המורחב כאשר נלחץ לעומקים שונים ובזוויות שונות. ניסויים אלה הראו שהקצה נשאר רך בדחיסות קטנות — דבר חשוב למניעת חבורות — אך עדיין יכל לעמוד בפני דחיפות גדולות יותר מבלי להעביר עומסי זעזוע פתאומיים חזרה למנוע. באמצעות כדור מודפס בתלת־ממד שהשמש כשחלופת ראש חסה, החוקרים בחנו כיצד סיבוב האצבע והמרחק ביניהן השפיעו על המשקל המקסימלי שהקליטה יכלה להחזיק. הם מצאו כי כוונון הגיאומטריה כדי להמנע ממגע קצה חד ולהפיץ את המגע על פני שטח רחב אפשר לקליטה להרים מטרות כבדות יותר תוך הגבלת העיוות של ה"ירק".
מהמשטח במעבדה לשורות בחווה אמיתית
המבחן האמיתי התקיים בחווה אנכית עובדת, שם הקליטה טיפלה בכמה גידולי עלים: חסות קריסטל, נאיבאי, שיאובאיצאי, קיילן וקייל. עבור חסות בצורת כדור, הקליטה השתמשה בזווית אצבע מתונה ומרווח רחב יותר כדי לכפות ולהדק את הראש באופן מאובטח מבלי לשפשף את הצמחים השכנים. עבור עלים בצורת מטריה עם גבעולים גבוהים יותר, האצבעות הסתובבו יותר כדי להגיע מתחת לחופת העלים או סביב הגבעול, תוך התאמת מרחק הלחיצה לגודל הצמח. בניסויים חוזרים המערכת אחזה והרימה בהצלחה את כל הצמחים הנבדקים ללא נזק נראה או החלקה, גם כאשר השורשים היו לא ממוקמים במרכז או שצורות הצמחים התגוונו. החוקרים גם הדגימו זרימת קטיף מלאה: מצלמה זיהתה אילו חסות מוכנות, הרובוט קטף אותן, העביר אותן לתחנת חיתוך שורשים ייעודית, ואז הזיז את הראשונים החתוכים לנקודת איסוף.
השלבים הבאים לעבר ירקות מותאמים אוטומטית
המחקר מראה שקליטה מתהפכת עם קצות רכים יכולה לגשר על הפער בין צמחים שבירים למכונות נוקשות, ולהציע טיפול עדין אך יציב במגוון ירקות עליים בחוות פנימיות צפופות. לקורא הכללי, המסר הוא שרובוטים כבר לא חייבים להיות מגושמים כשמדובר במזון: על ידי איפשור לקצות ה"אצבעות" שלהם לשנות צורה, הם יכולים להחליק למרחבים צרים ולחבק כל צמח כמעט בזהירות של עובד אנושי. המחברים מציינים ששיפורים עתידיים — כגון ראייה חכמה יותר, כוונון אוטומטי של זוויות האצבע, זיהוי החלקה משופר ועיצובים התחשבותיים בסניטציה — יהיו נחוצים כדי להגיע למהירויות מסחריות. עם זאת, עבודה זו מהווה צעד פרקטי ראשון לעבר קטיף אוטומטי מלא שיגן הן על היבול והן על איכות הסלטים שיגיעו בסופו של דבר לצלחת שלכם.
ציטוט: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
מילות מפתח: חקלאות אנכית, רובוטיקה רכה, ירקות עליים, קטיף רובוטי, אוטומציה חקלאית