Clear Sky Science · ar
ماسكة متغيرة التشكّل ومرنة للتعامل مع الخضروات الورقية المتنوعة في أنظمة الزراعة العمودية
لماذا الروبوتات الرقيقة مهمة لسلطة طعامك
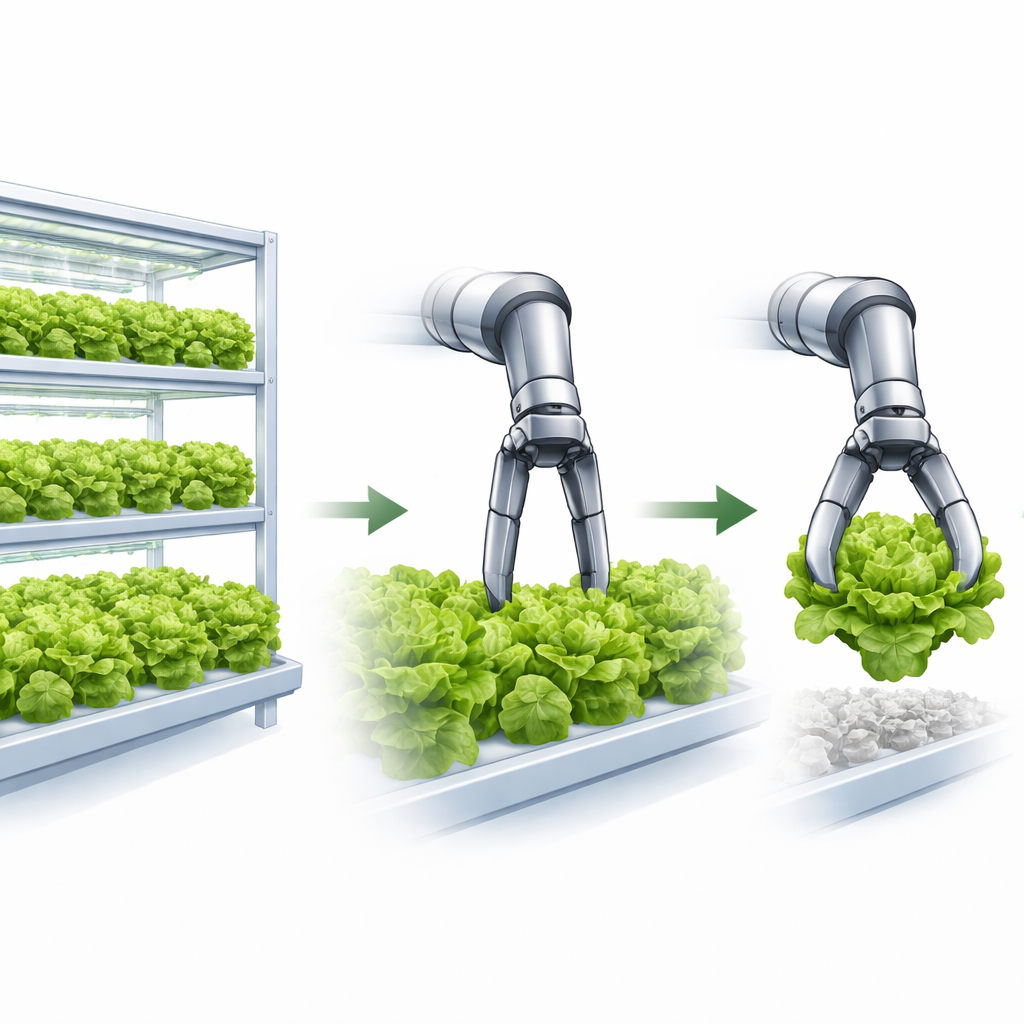
بينما تبحث المدن عن طرق لزراعة المزيد من الطعام قرب أماكن السكن، أصبحت المزارع العمودية — صفوف داخلية من الخضروات الورقية — جزءاً مهماً من إمداد المدينة بالغذاء. ومع ذلك لا يزال الكثير من الحصاد في هذه المزارع عالية التقنية يتم يدوياً، خصوصاً لخصائل الخس والخضروات الآسيوية الهشة التي تتكدم أوراقها بسهولة. يقدم هذا البحث نوعاً جديداً من ماسكات الروبوت مصمماً خصيصاً للتعامل بلطف وموثوقية مع مثل هذه الخضراوات الهشة، مما يفتح إمكانية إنتاج محلي أكثر اقتصادية ومرونة.
الزراعة إلى الأعلى في مساحات ضيقة
في أماكن تفتقر إلى الأرض مثل سنغافورة، تكدّس أنظمة الزراعة العمودية المحاصيل على طبقات من الصواني، مستخدمة ضوءاً وماءً ومواد مغذية محكومة بدقة لزراعة خضراوات متجانسة وجذابة. ولزيادة الإنتاج، تُترك النباتات على كل صينية لتنمو حتى تلامس أوراقها تقريباً السطح وتتكاثف. هذا التكدس مفيد للمحصول لكنه مشكلة للآلات: فالمِمسك التقليدي يجد مساحة قليلة ليتسلل بين النباتات، والتعامل غير الماهر قد يمزق الأوراق ويقصر العمر التخزيني وينشر التلوث. يتكيف العمال البشر بتغيير الأدوات وحركات اليد لكل نوع محصول، لكن ذلك يجعل الحصاد مجهدًا ومكلفًا وصعب التوسع.
طرف إصبع يتغير شكله عند الطلب
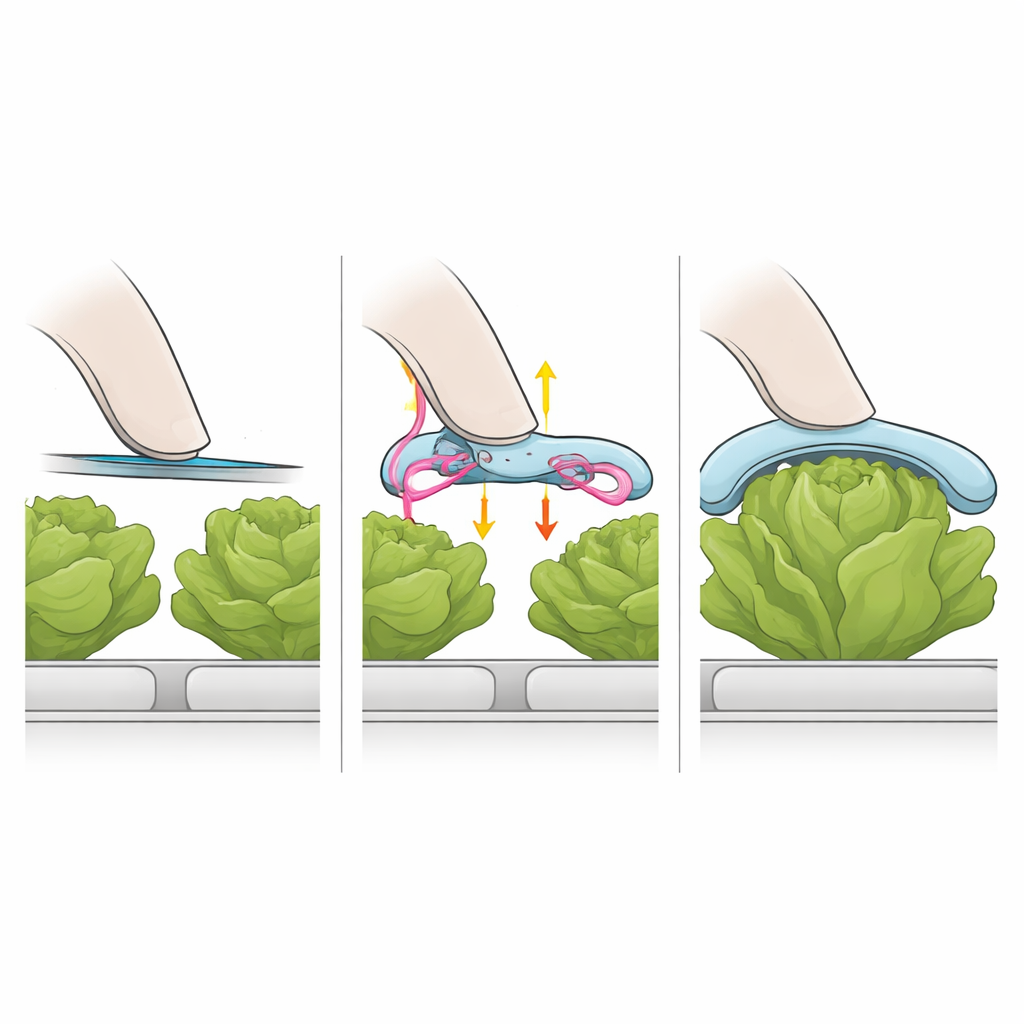
طور الباحثون مِمسكاً روبوتياً ذا إصبعين يمكن لقمتيهما تغيير الشكل لمطابقة المهمة. في حالتهما «المطوية» تكون الأطراف رفيعة ومسطحة، قادرة على الانزلاق داخل الفجوات الضيقة بين رؤوس الخس المجاورة. حالما تكون في الموضع، تسحب كابلات مخفية عموداً قابلاً للتحرك داخل كل إصبع، مما يتمدد ورقاً مرناً ينحني للخارج ليأخذ شكل وسادة ناعمة مقوّسة. توفر هذه الوسادة الموسعة سطحاً عريضا مبطناً يتوافق برفق مع النبات. من خلال تدوير الأصابع وضبط المسافة بينها، يمكن لنفس المِمسك أن يقبض من الجوانب أو يجرف من الأسفل، ملفوفاً جزئياً حول النبات كزوج من الأيدي الحذرة.
اختبار كيف يلتقي اللمس الناعم بالتماسك القوي
للتأكد من أن طرف الإصبع كان لطيفاً وفي الوقت نفسه قوياً، أجرى الفريق سلسلة من التجارب على الطاولة. قاسوا كيف ينحني الورق المرن مع تمدد العمود الداخلي، وما مقدار القوة التي تمارسها القمة الموسعة عند الضغط بأعماق وزوايا مختلفة. أظهرت هذه الاختبارات أن طرف الإصبع بقي ناعماً عند انضغاطات صغيرة — وهو أمر مهم لتفادي الكدمات — لكنه كان لا يزال قادراً على مقاومة دفعات أكبر دون نقل أحمال مفاجئة إلى المحرك. باستخدام كرة مطبوعة ثلاثية الأبعاد كبديل لرأس خس، استكشف الباحثون كيف أثرت زاوية دوران الأصابع ومسافتها على الوزن الأقصى الذي يمكن للمِمسك حمله. وجدوا أن ضبط الهندسة لتجنب ملامسة حواف حادة ولتوزيع اللمس على مساحة واسعة سمح للمِمسك برفع أهداف أثقل مع الحد من تشوه «النبات».
من طاولة المختبر إلى صفوف المزرعة الحقيقية
جاء الاختبار الحقيقي في مزرعة عمودية عاملة، حيث تعامل المِمسك مع عدة محاصيل ورقية: خس كريستال، ناىباي، شياوبايتشاي، كايلان، وكرنب. بالنسبة لخصائل الخس الكروية، استخدم المِمسك زاوية إصبع متواضعة ومسافة أوسع ليجرف ويثبت الرأس بأمان دون كشط النباتات المجاورة. أما للخضراوات ذات الشكل المظلي ذات السيقان الأطول، فقد دارت الأصابع أكثر للوصول تحت مظلة الأوراق أو حول الساق، مضبوطة مسافة القبضة لتناسب حجم النبات. في تجارب متكررة، نجح النظام في الإمساك ورفع جميع النباتات التجريبية دون تلف مرئي أو انزلاق، حتى عندما كانت الجذور غير مركزة أو اختلفت أشكال النباتات. كما قدّم الباحثون تدفق حصاد كامل: كاميرا حددت أي الخس جاهز، التقطه الروبوت، مرره إلى محطة مخصصة لقص الجذور، ثم نقل الرؤوس المقطوعة إلى نقطة تجميع.
الخطوات التالية نحو خضراوات مؤتمتة بالكامل
تُظهر الدراسة أن مِمسكاً متغير الشكل وذو أطراف لينة يمكنه سد الفجوة بين النباتات الهشة والآلات الصلبة، موفراً تعاملًا لطيفًا ومستقراً عبر أنواع مختلفة من الخضراوات الورقية في المزارع الداخلية المزدحمة. للغير متخصص، الخلاصة هي أن الروبوتات لم تعد مضجرة عند التعامل مع الطعام: بتمكين «أطرافها» من تغيير الشكل، يمكنها الانزلاق في الأماكن الضيقة واحتضان كل نبات بعناية تقارب عناية العامل البشري. يشير المؤلفون إلى أن تحسينات مستقبلية — مثل رؤية أذكى، ضبط أوتوماتيكي لزوايا الأصابع، كشف أفضل للانزلاق، وتصميمات تراعي التعقيم — ستكون ضرورية للوصول إلى سرعات تجارية. ومع ذلك، يمثل هذا العمل خطوة عملية أولى نحو حصاد مؤتمت بالكامل يحمي المحصول وجودة السلطات التي تصل في نهاية المطاف إلى طبقك.
الاستشهاد: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
الكلمات المفتاحية: الزراعة العمودية, الروبوتات اللينة, الخضراوات الورقية, الحصاد الآلي, أتمتة الزراعة