Clear Sky Science · es
Un agarre compliant y morfable para manejar diversas verduras de hoja en sistemas de agricultura vertical
Por qué importan los robots delicados para tu ensalada
Mientras las ciudades buscan formas de producir más alimentos cerca del consumo, las granjas verticales —pilas interiores de verduras de hoja— se están convirtiendo en una parte importante del suministro urbano. Sin embargo, gran parte de la cosecha en estas granjas de alta tecnología sigue realizándose a mano, sobre todo para lechugas delicadas y verduras asiáticas cuyas hojas se magullan con facilidad. Este artículo presenta un nuevo tipo de pinza robótica diseñada específicamente para manejar esas verduras frágiles con suavidad y fiabilidad, abriendo la puerta a una producción local de alimentos más asequible y resiliente.
Cultivar hacia arriba en espacios reducidos
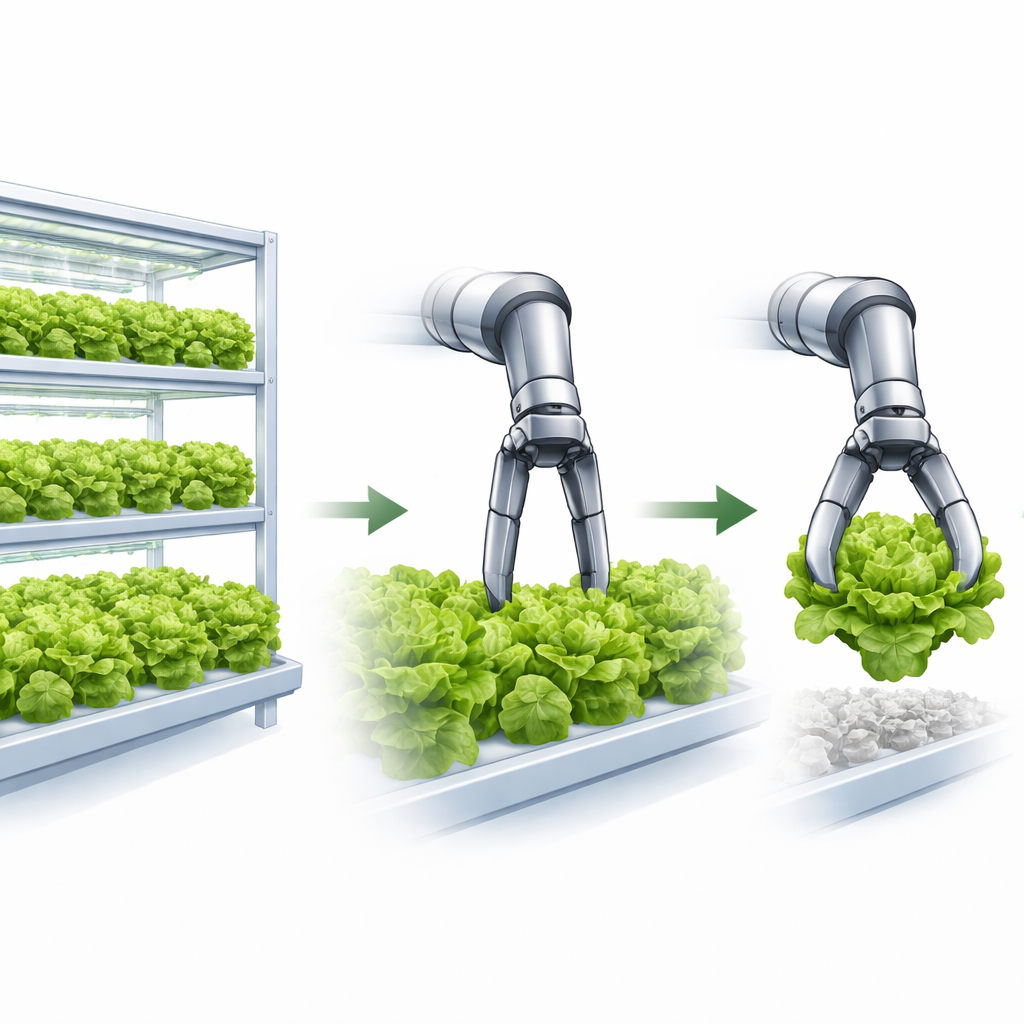
En lugares con escasez de terreno como Singapur, los sistemas de agricultura vertical apilan cultivos en bandejas por niveles, usando luz, agua y nutrientes controlados con precisión para cultivar hojas uniformes y atractivas. Para maximizar la producción, las plantas en cada bandeja flotante se dejan crecer hasta que sus hojas se tocan y casi cubren la superficie. Ese hacinamiento es bueno para el rendimiento pero malo para las máquinas: una pinza convencional tiene poco espacio para colarse entre plantas, y una manipulación torpe puede rasgar hojas, acortar la vida útil y propagar contaminación. Los operarios humanos se adaptan cambiando herramientas y movimientos de la mano según el tipo de cultivo, pero eso hace que la cosecha sea intensiva en mano de obra, costosa y difícil de escalar.
Una yema táctil que cambia de forma a demanda
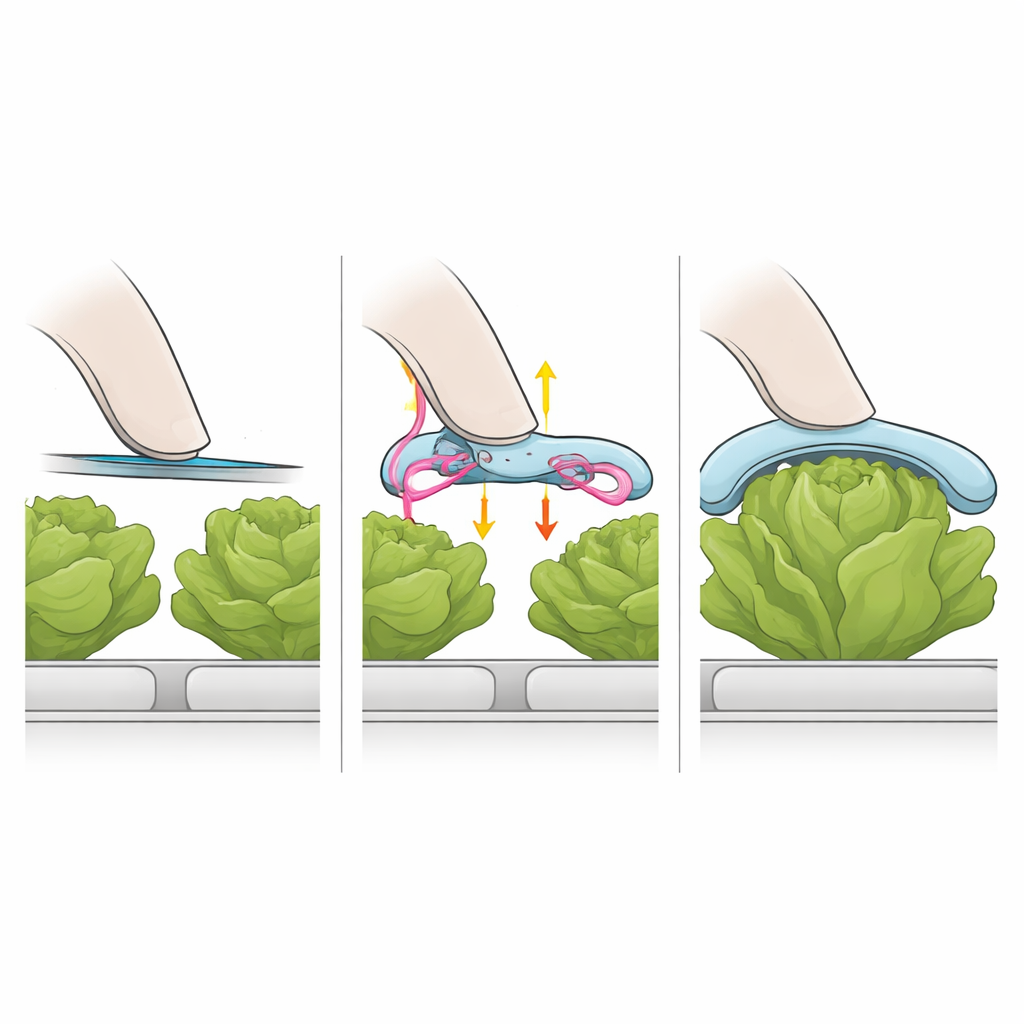
Los investigadores desarrollaron una pinza robótica de dos dedos cuyas yemas pueden cambiar de forma para adaptarse a la tarea. En su estado “colapsado”, las puntas son delgadas y planas, capaces de deslizarse en los estrechos huecos entre cabezas de lechuga adyacentes. Una vez en posición, cables ocultos tiran de una espina móvil dentro de cada dedo, estirando una lámina flexible que se curva hacia afuera formando una almohadilla blanda en forma de arco. Esta almohadilla expandida ofrece una superficie amplia y acolchada que se amolda suavemente a la planta. Rotando los dedos y ajustando la separación entre ellos, la misma pinza puede pellizcar por los laterales o recoger desde abajo, envolviendo parcialmente la planta como un par de manos cuidadosas.
Probar cómo el tacto suave se encuentra con el agarre firme
Para asegurarse de que la yema fuera a la vez suave y resistente, el equipo realizó una serie de experimentos de banco. Midiendo cómo se doblaba la lámina flexible cuando la espina interna se extendía, y cuánta fuerza ejercía la punta expandida al presionarla a diferentes profundidades y ángulos. Estas pruebas mostraron que la yema permanecía blanda con pequeñas compresiones —importante para evitar magulladuras— pero aún podía resistir empujes mayores sin transmitir cargas repentinas al motor. Usando una bola impresa en 3D para simular una cabeza de lechuga, los investigadores exploraron cómo la rotación y el espaciado de los dedos afectaban el peso máximo que la pinza podía sostener. Encontraron que afinar la geometría para evitar contactos con bordes afilados y repartir el contacto sobre una amplia área permitía a la pinza levantar objetivos más pesados limitando a la vez la deformación del “vegetal”.
Del banco de laboratorio a las filas reales de cultivo
La prueba real llegó en una granja vertical en funcionamiento, donde la pinza manejó varios cultivos de hoja: lechugas cristal, naibai, xiaobaicai, kailan y col rizada. Para lechugas de forma esférica, la pinza usó un ángulo de dedo moderado y mayor separación para recoger y sujetar la cabeza con seguridad sin rozar las plantas vecinas. Para verduras en forma de paraguas con tallos más altos, los dedos rotaron más para alcanzar bajo el dosel de hojas o rodear el tallo, ajustando la distancia de pinza según el tamaño de la planta. En ensayos repetidos, el sistema logró agarrar y levantar todas las plantas de prueba sin daños visibles ni deslizamientos, incluso cuando las raíces estaban desplazadas o las formas de las plantas variaban. Los investigadores también demostraron un flujo completo de cosecha: una cámara identificaba qué lechugas estaban listas, el robot las cogía, las pasaba a una estación personalizada de recorte de raíces y luego trasladaba las cabezas recortadas a un punto de recogida.
Siguientes pasos hacia una automatización completa de las hojas
El estudio muestra que una pinza morfable con puntas blandas puede salvar la brecha entre plantas frágiles y máquinas rígidas, proporcionando un manejo suave pero estable para distintas verduras de hoja en granjas interiores densas. Para el lector general, la conclusión es que los robots ya no tienen por qué ser torpes al tratar con alimentos: permitiendo que sus “yemas” cambien de forma, pueden deslizarse en espacios estrechos y acunar cada planta casi tan cuidadosamente como un trabajador humano. Los autores señalan que harán falta mejoras futuras —como visión más inteligente, ajuste automático de los ángulos de los dedos, mejor detección de deslizamientos y diseños que tengan en cuenta la higienización— para alcanzar velocidades comerciales. Aun así, este trabajo representa un primer paso práctico hacia una cosecha totalmente automatizada que proteja tanto el cultivo como la calidad de las ensaladas que finalmente llegan a tu plato.
Cita: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
Palabras clave: agricultura vertical, robótica blanda, verduras de hoja, cosecha robótica, automatización agrícola