Clear Sky Science · de
Ein anpassungsfähiger, sich verformender Greifer für die Handhabung verschiedener Blattgemüse in vertikalen Farmsystemen
Warum sanfte Roboter für Ihren Salat wichtig sind
Da Städte nach Möglichkeiten suchen, mehr Lebensmittel in der Nähe zu produzieren, werden vertikale Farmen – übereinander angeordnete Innenflächen mit Blattgemüse – zu einem wichtigen Bestandteil der städtischen Nahrungsversorgung. Dennoch geschieht ein Großteil der Ernte in diesen High-Tech-Farmen noch per Hand, insbesondere bei empfindlichen Kopfsalaten und asiatischen Blattgemüsen, deren Blätter leicht beschädigen. Dieser Beitrag stellt einen neuen Greifertyp vor, der speziell dafür entwickelt wurde, solche zerbrechlichen Gemüse schonend und verlässlich zu handhaben und so den Weg für preiswertere und widerstandsfähigere lokale Lebensmittelproduktion zu ebnen.
Nach oben anbauen in beengten Räumen
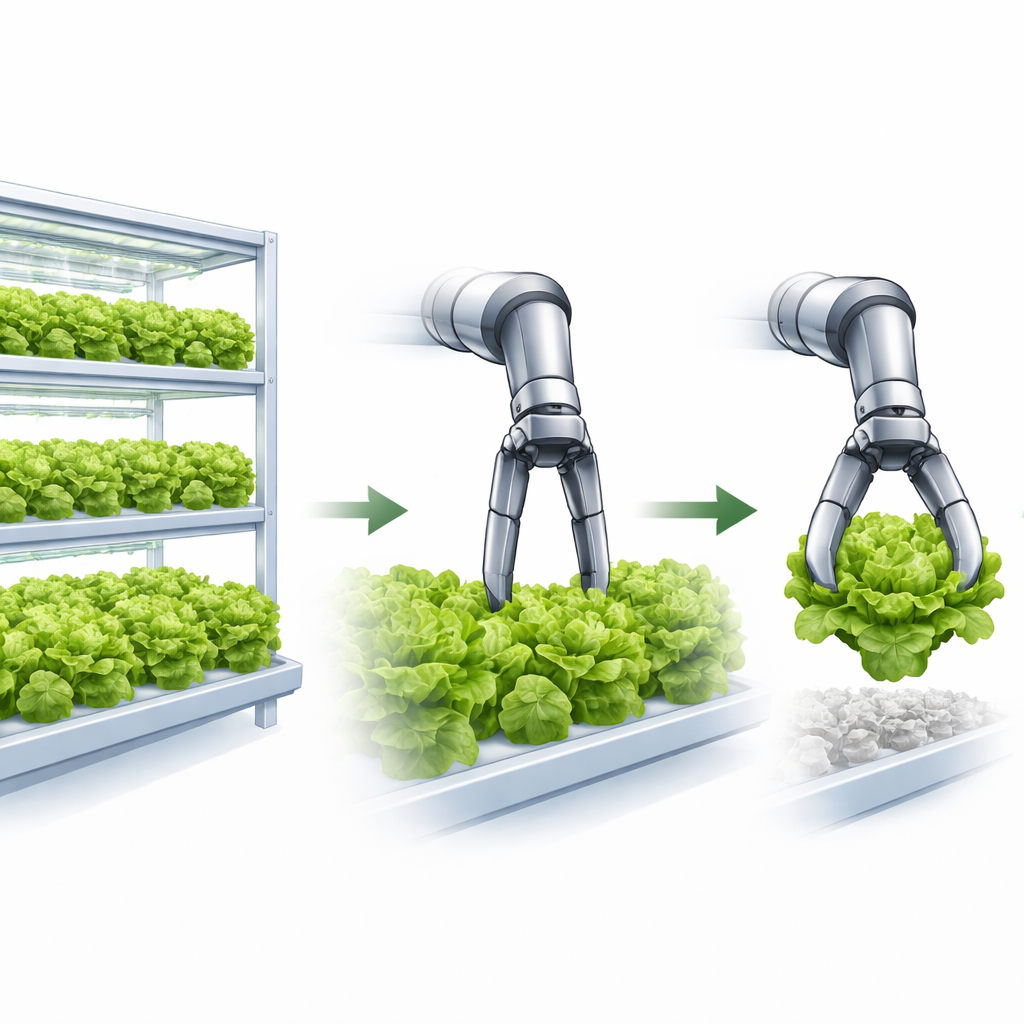
An Orten mit knapper Fläche wie Singapur packen vertikale Farmsysteme Pflanzen auf mehreren Ebenen in Tabletts und nutzen präzise gesteuerte Beleuchtung, Bewässerung und Nährstoffversorgung, um gleichmäßige, attraktive Grüns zu erzeugen. Um den Ertrag zu maximieren, dürfen Pflanzen auf jedem Tablett so weit wachsen, bis ihre Blätter sich berühren und die Oberfläche nahezu bedecken. Diese Dichte ist zwar gut für den Ertrag, aber schlecht für Maschinen: Ein herkömmlicher Greifer hat wenig Platz, um zwischen den Pflanzen hindurch zu schlüpfen, und ungeschickte Handhabung kann Blätter zerreißen, die Haltbarkeit verkürzen und Kontamination verbreiten. Menschliche Arbeiter passen Werkzeuge und Handbewegungen an jede Pflanzenart an, doch das macht die Ernte arbeitsintensiv, kostspielig und schwer skalierbar.
Eine Fingerspitze, die sich auf Knopfdruck verändert
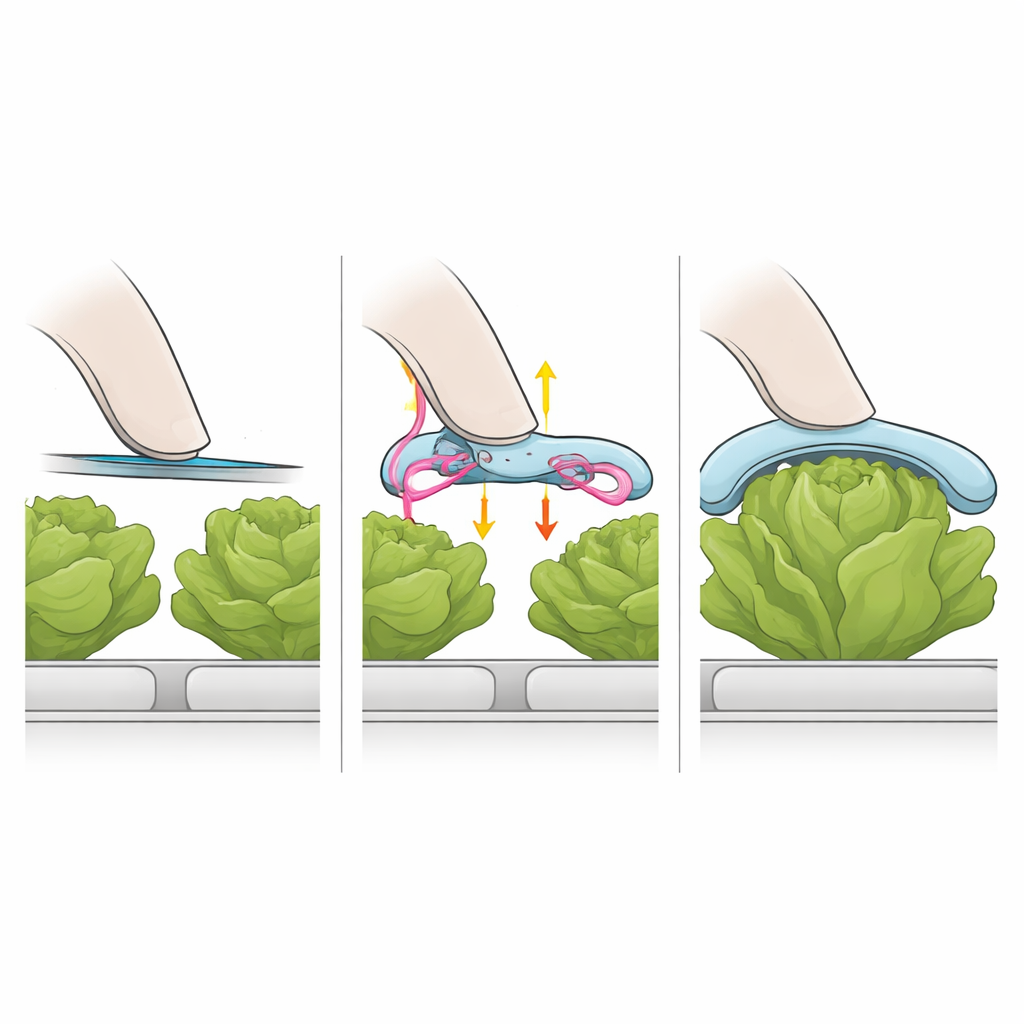
Die Forschenden entwickelten einen zweifingrigen Roboter-Greifer, dessen Fingerspitzen ihre Form verändern können, um sich der Aufgabe anzupassen. Im „zusammengefalteten“ Zustand sind die Spitzen schlank und flach, sodass sie in die engen Zwischenräume zwischen benachbarten Salatköpfen gleiten können. Sobald sie in Position sind, ziehen versteckte Kabel eine bewegliche Rückenstruktur in jedem Finger, wodurch eine flexible Membran gespannt wird, die sich nach außen in ein weiches, bogenförmiges Polster wölbt. Dieses aufgeweitete Polster bietet eine breite, gepolsterte Fläche, die sich sanft an die Pflanze anschmiegt. Durch Drehen der Finger und Einstellen des Abstands kann derselbe Greifer entweder seitlich zupfen oder von unten ausschöpfen und die Pflanze teilweise wie zwei behutsame Hände umschließen.
Prüfen, wie sanfte Berührung auf festen Halt trifft
Um sicherzustellen, dass die Fingerspitze sowohl sanft als auch stark ist, führte das Team eine Reihe von Tischversuchen durch. Sie maßen, wie sich die flexible Membran bog, als die innere Rückenstruktur verlängert wurde, und wie viel Kraft die aufgeweitete Spitze bei unterschiedlichen Eindringtiefen und Winkeln ausübte. Diese Tests zeigten, dass die Fingerspitze bei kleinen Kompressionen weich blieb – wichtig, um Druckstellen zu vermeiden – aber größere Schübe abwehren konnte, ohne plötzliche Lasten an den Motor zurückzugeben. Mit einer 3D-gedruckten Kugel als Ersatz für einen Salatkopf untersuchten die Forschenden dann, wie Fingerrotation und Abstand das maximale Gewicht beeinflussen, das der Greifer halten kann. Sie stellten fest, dass die Geometrie so abzustimmen, dass scharfe Kanten vermieden und die Berührung über eine große Fläche verteilt wird, es dem Greifer ermöglichte, schwerere Objekte zu heben und gleichzeitig die Verformung des „Gemüses“ zu begrenzen.
Vom Laborbank- zum realen Pflanzenbestand
Der eigentliche Test fand in einer funktionierenden vertikalen Farm statt, wo der Greifer mehrere Blattkulturen handhabte: Eissalate, Naibai, Xiaobaicai, Kailan und Grünkohl. Bei kugelförmigen Salaten verwendete der Greifer einen moderaten Fingerwinkel und größeren Abstand, um den Kopf sicher auszuschöpfen und zu klemmen, ohne benachbarte Pflanzen zu schaben. Bei schirmförmigen Grüns mit höheren Stängeln drehten sich die Finger weiter, um unter das Blätterdach oder um den Stängel zu greifen, wobei der Pinch-Abstand an die Pflanzengröße angepasst wurde. In wiederholten Versuchen gelang es dem System, alle Testpflanzen ohne sichtbare Beschädigung oder Abrutschen zu greifen und zu heben, selbst wenn die Wurzeln nicht zentriert oder die Pflanzenformen unterschiedlich waren. Die Forschenden demonstrierten außerdem einen vollständigen Ernteablauf: Eine Kamera identifizierte erntereife Salate, der Roboter pflückte sie, übergab sie an eine spezielle Wurzelbeschneidestation und brachte die geschnittenen Köpfe anschließend zu einer Sammelstelle.
Nächste Schritte hin zur vollständig automatisierten Blattproduktion
Die Studie zeigt, dass ein sich verformender, weich gepolsterter Greifer die Lücke zwischen empfindlichen Pflanzen und starren Maschinen schließen kann und eine schonende, zugleich stabile Handhabung unterschiedlicher Blattgemüse in dicht bestückten Innenfarmen ermöglicht. Für Laien lautet die Kernbotschaft: Roboter müssen beim Umgang mit Lebensmitteln nicht mehr grobschlächtig sein – indem sie ihren „Fingerspitzen“ erlauben, die Form zu ändern, können sie in enge Räume schlüpfen und jede Pflanze nahezu so behutsam halten wie ein menschlicher Arbeiter. Die Autoren weisen darauf hin, dass künftige Verbesserungen – etwa intelligentere Bildverarbeitung, automatische Anpassung der Fingerwinkel, bessere Rutscherkennung und sanitärgerechte Konstruktionen – nötig sein werden, um kommerzielle Geschwindigkeiten zu erreichen. Dennoch ist diese Arbeit ein praktischer erster Schritt hin zu einer vollautomatischen Ernte, die sowohl die Pflanzen als auch die Qualität der Salate schützt, die am Ende auf Ihrem Teller landen.
Zitation: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
Schlüsselwörter: vertikale Landwirtschaft, weiche Robotik, Blattgemüse, robotische Ernte, landwirtschaftliche Automatisierung