Clear Sky Science · en
A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems
Why gentle robots matter for your salad
As cities look for ways to grow more food close to home, vertical farms—indoor stacks of leafy greens—are becoming an important part of the urban food supply. Yet much of the harvesting in these high-tech farms is still done by hand, especially for delicate lettuces and Asian greens whose leaves bruise easily. This paper presents a new type of robot gripper designed specifically to handle such fragile vegetables gently and reliably, opening the door to more affordable and resilient local food production.
Farming upward in tight spaces
In land-scarce places like Singapore, vertical farming systems pack crops onto tiers of trays, using carefully controlled light, water, and nutrients to grow uniform, attractive greens. To maximize output, plants on each floating tray are allowed to grow until their leaves touch and nearly cover the surface. That crowding is good for yield but bad for machines: a conventional gripper has little room to squeeze between plants, and clumsy handling can tear leaves, shorten shelf life, and spread contamination. Human workers adapt by changing tools and hand motions for each crop type, but this makes harvesting labor-intensive, costly, and difficult to scale.
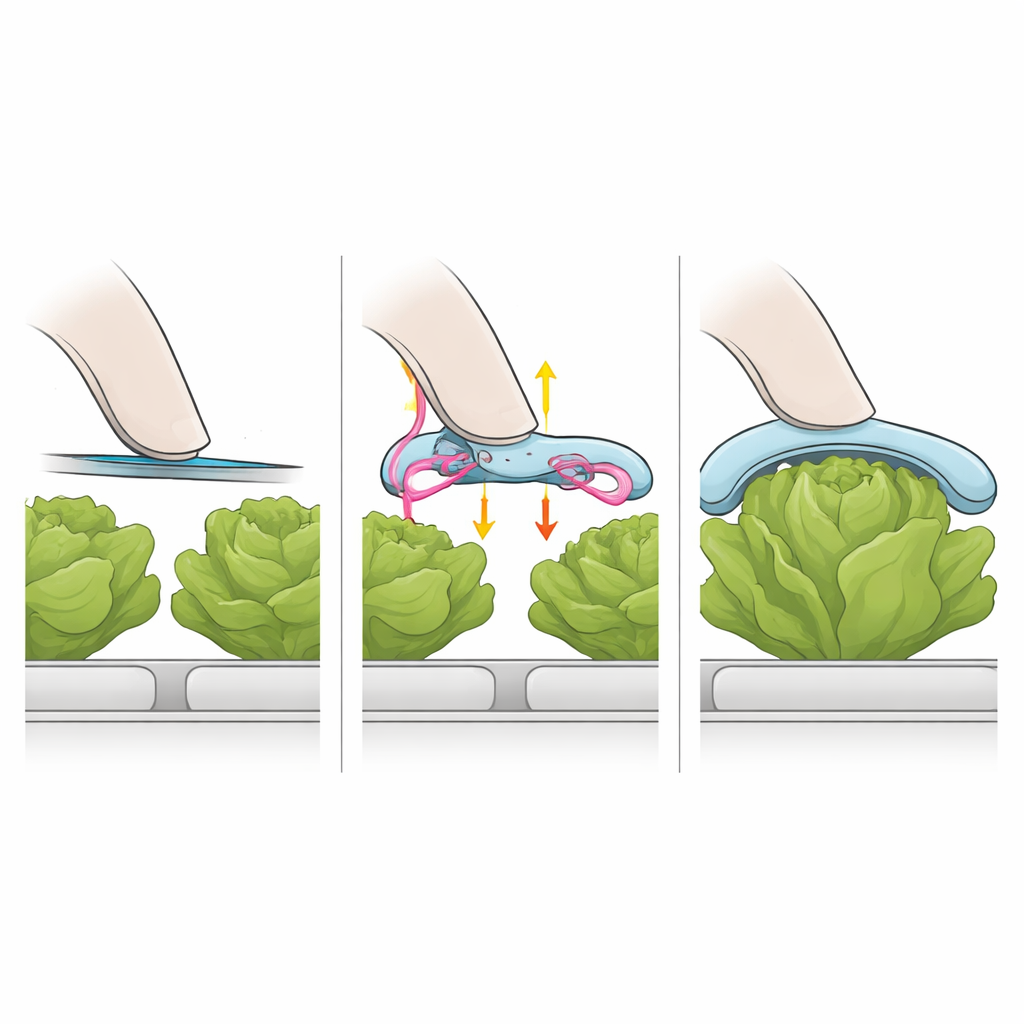
A fingertip that changes shape on demand
The researchers developed a two-finger robotic gripper whose fingertips can change shape to match the job. In their “collapsed” state, the tips are slim and flat, able to slip into the narrow gaps between neighboring lettuce heads. Once in position, hidden cables pull a movable backbone inside each finger, stretching a flexible sheet that bends outward into a soft, bow-shaped pad. This expanded pad offers a broad, cushioned surface that gently conforms to the plant. By rotating the fingers and adjusting how far apart they are, the same gripper can either pinch from the sides or scoop from below, wrapping partially around the plant like a pair of careful hands.
Testing how soft touch meets firm hold
To make sure the fingertip was both gentle and strong, the team ran a series of bench-top experiments. They measured how the flexible sheet bent as the internal backbone extended, and how much force the expanded tip exerted when pressed to different depths and at different angles. These tests showed that the fingertip remained soft at small compressions—important for avoiding bruises—but could still resist larger pushes without transferring sudden loads back to the motor. Using a 3D-printed ball to stand in for a lettuce head, the researchers then explored how finger rotation and spacing affected the maximum weight the gripper could hold. They found that tuning the geometry to avoid sharp edge contact and to spread the touch over a wide area allowed the gripper to lift heavier targets while limiting deformation of the “vegetable.”
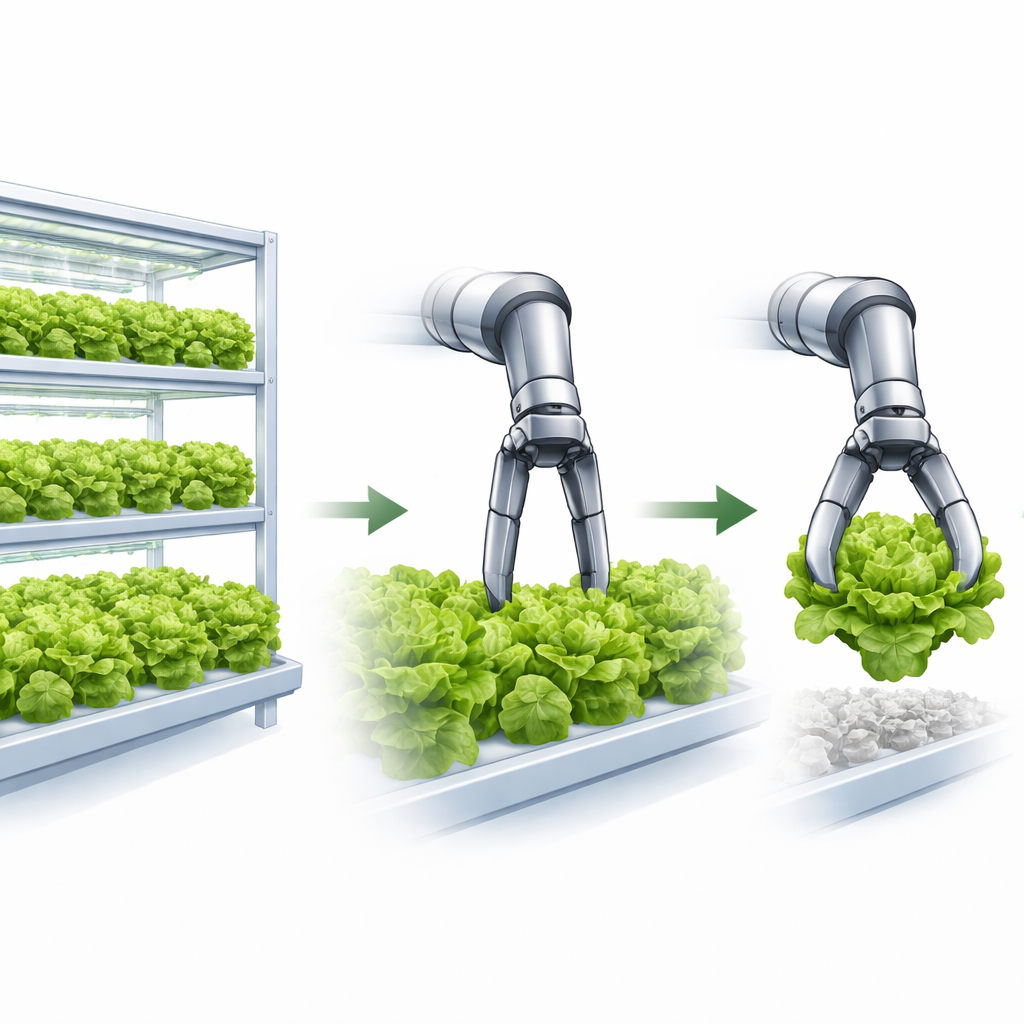
From lab bench to real farm rows
The real test came in a working vertical farm, where the gripper handled several leafy crops: crystal lettuces, naibai, xiaobaicai, kailan, and kale. For ball-shaped lettuces, the gripper used a modest finger angle and wider spacing to scoop and clamp the head securely without scraping neighboring plants. For umbrella-shaped greens with taller stems, the fingers rotated further to reach under the leaf canopy or around the stem, adjusting the pinch distance to suit plant size. In repeated trials, the system successfully grasped and lifted all test plants without visible damage or slipping, even when roots were off-center or plant shapes varied. The researchers also demonstrated a full harvesting flow: a camera identified which lettuces were ready, the robot picked them, passed them to a custom root-trimming station, and then moved the trimmed heads to a collection point.
Next steps toward fully automated greens
The study shows that a morphing, soft-tipped gripper can bridge the gap between fragile plants and rigid machines, providing gentle yet stable handling across different leafy vegetables in crowded indoor farms. For a layperson, the take-home message is that robots no longer have to be clumsy when dealing with food: by letting their “fingertips” change shape, they can slip into tight spaces and cradle each plant almost as carefully as a human worker. The authors note that future improvements—such as smarter vision, automatic tuning of finger angles, better slip detection, and sanitation-aware designs—will be needed to reach commercial speeds. Still, this work marks a practical first step toward fully automated harvesting that protects both the crop and the quality of the salads that eventually reach your plate.
Citation: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
Keywords: vertical farming, soft robotics, leafy vegetables, robotic harvesting, agricultural automation