Clear Sky Science · fr
Une pince conforme et morphing pour manipuler diverses feuilles en agriculture verticale
Pourquoi des robots délicats comptent pour votre salade
Alors que les villes cherchent des moyens de produire davantage d’aliments à proximité, les fermes verticales — des piles intérieures de légumes-feuilles — deviennent une composante importante de l’approvisionnement urbain. Pourtant, une grande partie de la récolte dans ces fermes high-tech est encore effectuée à la main, en particulier pour les laitues et les légumes asiatiques délicats dont les feuilles meurtrissent facilement. Cet article présente un nouveau type de pince robotisée conçue spécifiquement pour manipuler ces légumes fragiles de façon douce et fiable, ouvrant la voie à une production locale plus abordable et résiliente.
Monter la culture dans des espaces exigus
Dans des zones où la terre est rare comme Singapour, les systèmes de culture verticale empilent les cultures sur des plateaux à étages, utilisant un éclairage, une eau et des nutriments soigneusement contrôlés pour obtenir des feuilles uniformes et attractives. Pour maximiser le rendement, les plantes sur chaque plateau flottant sont laissées croître jusqu’à ce que leurs feuilles se touchent et couvrent presque la surface. Cette densification est bonne pour le rendement mais problématique pour les machines : une pince conventionnelle dispose de peu d’espace pour se faufiler entre les plantes, et une manipulation maladroite peut déchirer les feuilles, raccourcir la durée de conservation et propager des contaminants. Les ouvriers humains s’adaptent en changeant d’outils et de gestes selon le type de culture, mais cela rend la récolte gourmande en main-d’œuvre, coûteuse et difficile à industrialiser.
Un « bout de doigt » qui change de forme à la demande
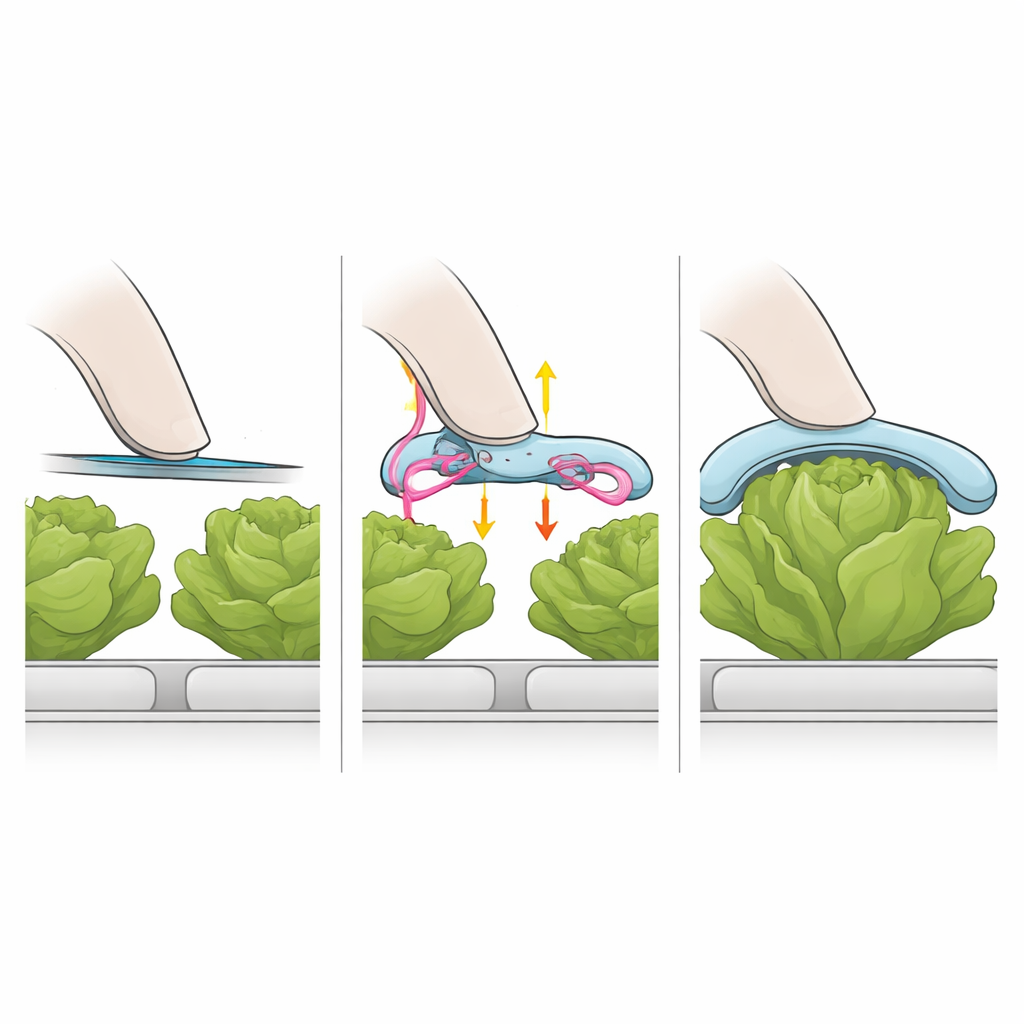
Les chercheurs ont développé une pince robotisée à deux doigts dont les extrémités de doigt peuvent changer de forme pour s’adapter à la tâche. À l’état « replié », les pointes sont fines et plates, capables de se glisser dans les étroites fentes entre les têtes de laitue voisines. Une fois en position, des câbles dissimulés tirent une colonne mobile à l’intérieur de chaque doigt, tendant une peau flexible qui se courbe vers l’extérieur en un coussinet souple en forme d’arc. Ce coussinet élargi offre une surface large et amortissante qui épouse doucement la plante. En faisant pivoter les doigts et en ajustant leur écartement, la même pince peut soit pincer par les côtés soit racler par en dessous, en enveloppant partiellement la plante comme une paire de mains précautionneuses.
Tester la rencontre du toucher doux et de la prise ferme
Pour s’assurer que l’extrémité était à la fois douce et solide, l’équipe a réalisé une série d’expériences sur banc. Ils ont mesuré la façon dont la peau flexible se plie lorsque la colonne interne s’étend, et la force exercée par la pointe élargie lorsqu’elle est pressée à différentes profondeurs et angles. Ces tests ont montré que la pointe restait souple sous faibles compressions — important pour éviter les meurtrissures — mais pouvait encore résister à des efforts plus importants sans renvoyer de charges soudaines au moteur. À l’aide d’une boule imprimée en 3D représentant une tête de laitue, les chercheurs ont ensuite étudié comment la rotation des doigts et leur écartement affectaient le poids maximal que la pince pouvait supporter. Ils ont constaté que régler la géométrie pour éviter les contacts sur des arêtes vives et répartir le contact sur une large surface permettait de soulever des cibles plus lourdes tout en limitant la déformation du « légume ».
Du banc de laboratoire aux rangs de la ferme
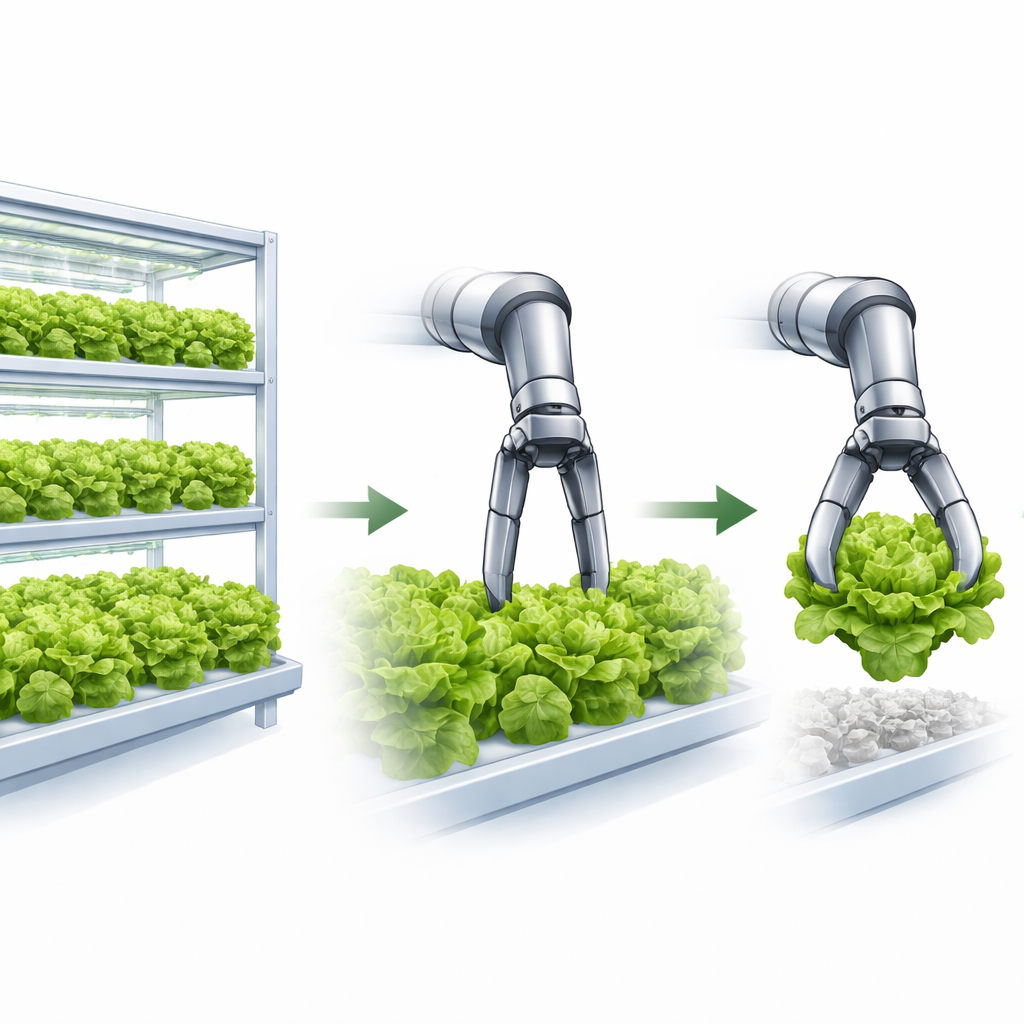
Le véritable test a eu lieu dans une ferme verticale opérationnelle, où la pince a manipulé plusieurs cultures feuillées : laitues pommées, naibai, xiaobaicai, kailan et chou frisé. Pour les laitues sphériques, la pince utilisait un angle de doigt modéré et un écartement plus large pour racler et serrer la tête en toute sécurité sans racler les plantes voisines. Pour les feuilles en forme de parapluie avec des tiges plus hautes, les doigts pivotaient davantage pour atteindre sous le couvert feuilles ou autour de la tige, ajustant la distance de pincement selon la taille de la plante. Lors d’essais répétés, le système a saisi et soulevé avec succès toutes les plantes testées sans dommages visibles ni glissement, même lorsque les racines étaient décentrées ou que les formes variaient. Les chercheurs ont aussi démontré un flux complet de récolte : une caméra identifiait quelles laitues étaient prêtes, le robot les cueillait, les passait à une station de coupe des racines sur mesure, puis déposait les têtes équeutées à un point de collecte.
Prochaines étapes vers des verts entièrement automatisés
L’étude montre qu’une pince morphing à embouts souples peut combler le fossé entre plantes fragiles et machines rigides, offrant une manipulation douce mais stable sur différentes feuilles dans des fermes intérieures densément peuplées. Pour le non-spécialiste, le message principal est que les robots n’ont plus besoin d’être maladroits quand il s’agit de nourriture : en laissant leurs « fingertips » changer de forme, ils peuvent se faufiler dans des espaces restreints et câliner chaque plante presque aussi soigneusement qu’un ouvrier humain. Les auteurs notent que des améliorations futures — comme une vision plus intelligente, un réglage automatique des angles de doigts, une meilleure détection du glissement et des conceptions adaptées à l’hygiène — seront nécessaires pour atteindre des cadences commerciales. Toutefois, ce travail constitue une première étape pratique vers une récolte entièrement automatisée qui protège à la fois la culture et la qualité des salades qui finiront dans votre assiette.
Citation: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
Mots-clés: agriculture verticale, robotique souple, légumes à feuilles, récolte robotique, automatisation agricole