Clear Sky Science · nl
Een compliant, vormveranderende grijper voor het hanteren van diverse bladgroenten in verticale landbouwsystemen
Waarom zachte robots belangrijk zijn voor uw salade
Naarmate steden zoeken naar manieren om meer voedsel dicht bij huis te verbouwen, worden verticale boerderijen — binnenopstellingen met lagen bladgroenten — een belangrijk onderdeel van de stedelijke voedselvoorziening. Toch gebeurt veel van de oogst in deze hoogtechnologische kassen nog steeds met de hand, vooral bij delicate sla- en Aziatische bladgewassen waarvan de blaadjes snel beurse plekken krijgen. Dit artikel presenteert een nieuw type robotgrijper dat speciaal is ontworpen om zulke fragiele groenten zacht en betrouwbaar te hanteren, waardoor betaalbaardere en veerkrachtigere lokale voedselproductie mogelijk wordt.
Opwaarts telen in krappe ruimtes
In landarme gebieden zoals Singapore stapelen verticale teeltsystemen gewassen op lagen met trays, waarbij licht, water en voedingsstoffen nauwkeurig worden geregeld om uniforme, aantrekkelijke bladgroenten te kweken. Om de opbrengst te maximaliseren mogen planten op elke drijvende tray groeien totdat hun bladeren elkaar raken en bijna het oppervlak bedekken. Die dichtheid is goed voor de opbrengst maar slecht voor machines: een conventionele grijper heeft nauwelijks ruimte om tussen planten te drukken, en lomp hanteren kan bladeren scheuren, de houdbaarheid verkorten en besmetting verspreiden. Menselijke werknemers passen zich aan door gereedschappen en handbewegingen per gewastype te veranderen, maar dat maakt oogsten arbeidsintensief, duur en moeilijk schaalbaar.
Een vingertop die op aanvraag van vorm verandert
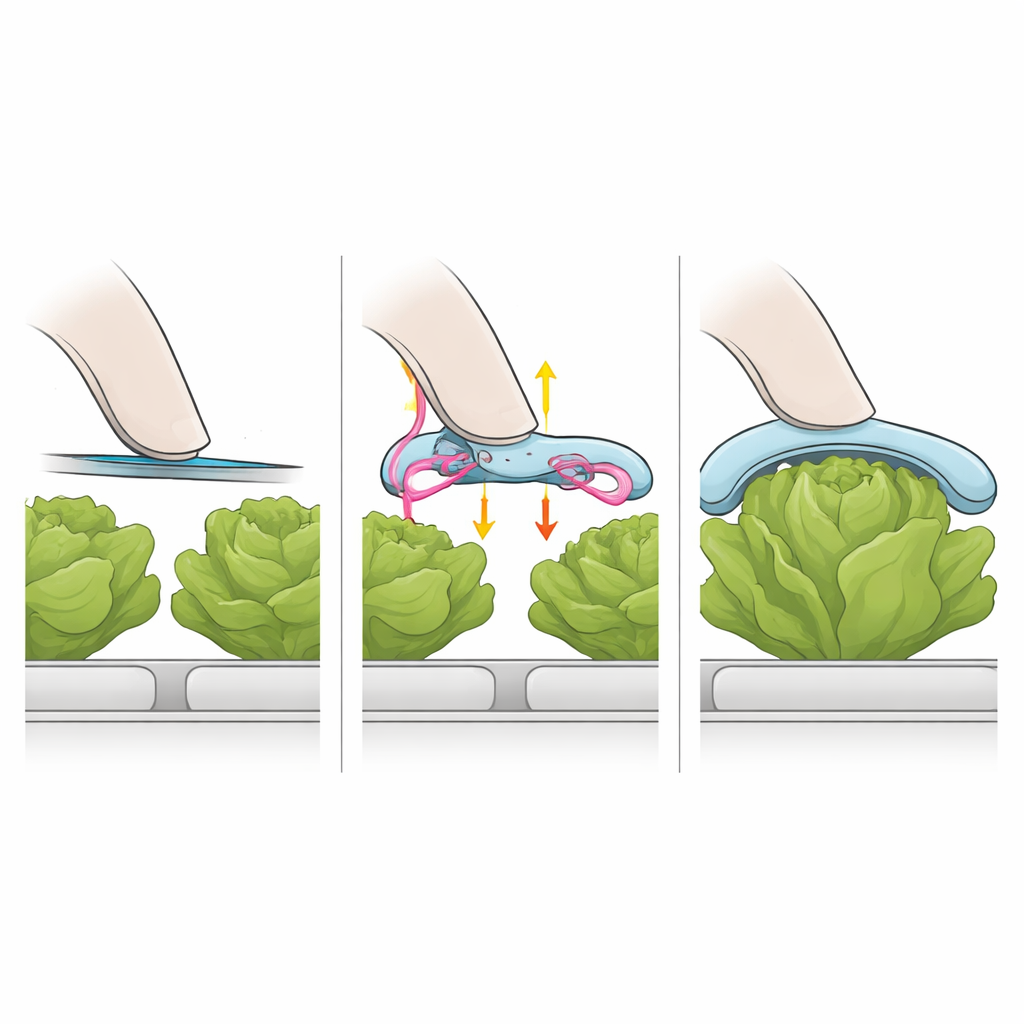
De onderzoekers ontwikkelden een tweevoudige robotgrijper waarvan de vingertoppen van vorm kunnen veranderen om bij de taak te passen. In hun "ingevouwen" toestand zijn de uiteinden slank en plat, waardoor ze in de smalle ruimten tussen naburige kropjes sla kunnen glijden. Eenmaal in positie trekken verborgen kabels een beweegbare ruggengraat in elke vinger, waardoor een flexibele plaat wordt uitgerekt die naar buiten buigt tot een zachte, boogvormige pad. Deze uitgezette pad biedt een brede, verende oppervlakte die zich zachtjes naar de plant vormt. Door de vingers te roteren en de onderlinge afstand aan te passen, kan dezelfde grijper ofwel van de zijkanten knijpen of van onderen scheppen, en zich gedeeltelijk om de plant wikkelen als een paar zorgvuldige handen.
Testen hoe zachte aanraking en stevige greep samenkomen
Om zeker te zijn dat de vingertop zowel zacht als sterk was, voerde het team een reeks proefopstellingen op de werkbank uit. Ze maten hoe de flexibele plaat buigde wanneer de interne ruggengraat uitrekte, en hoeveel kracht de uitgezette tip uitoefende bij verschillende drukdieptes en hoeken. Deze tests toonden aan dat de vingertop zacht bleef bij kleine compressies — belangrijk om kneuzingen te vermijden — maar toch grotere duwen kon weerstaan zonder plotselinge belasting terug te geven aan de motor. Met een 3D-geprinte bal als vervanging voor een slakrop onderzochten de onderzoekers vervolgens hoe vingerrotatie en -afstand de maximale last beïnvloedden die de grijper kon vasthouden. Ze vonden dat het afstemmen van de geometrie om scherpe randcontacten te vermijden en de aanraking over een groot oppervlak te spreiden de grijper in staat stelde zwaardere doelen op te tillen terwijl de vervorming van de "groente" werd beperkt.
Van laboratoriumbank naar echte rijen op de boerderij
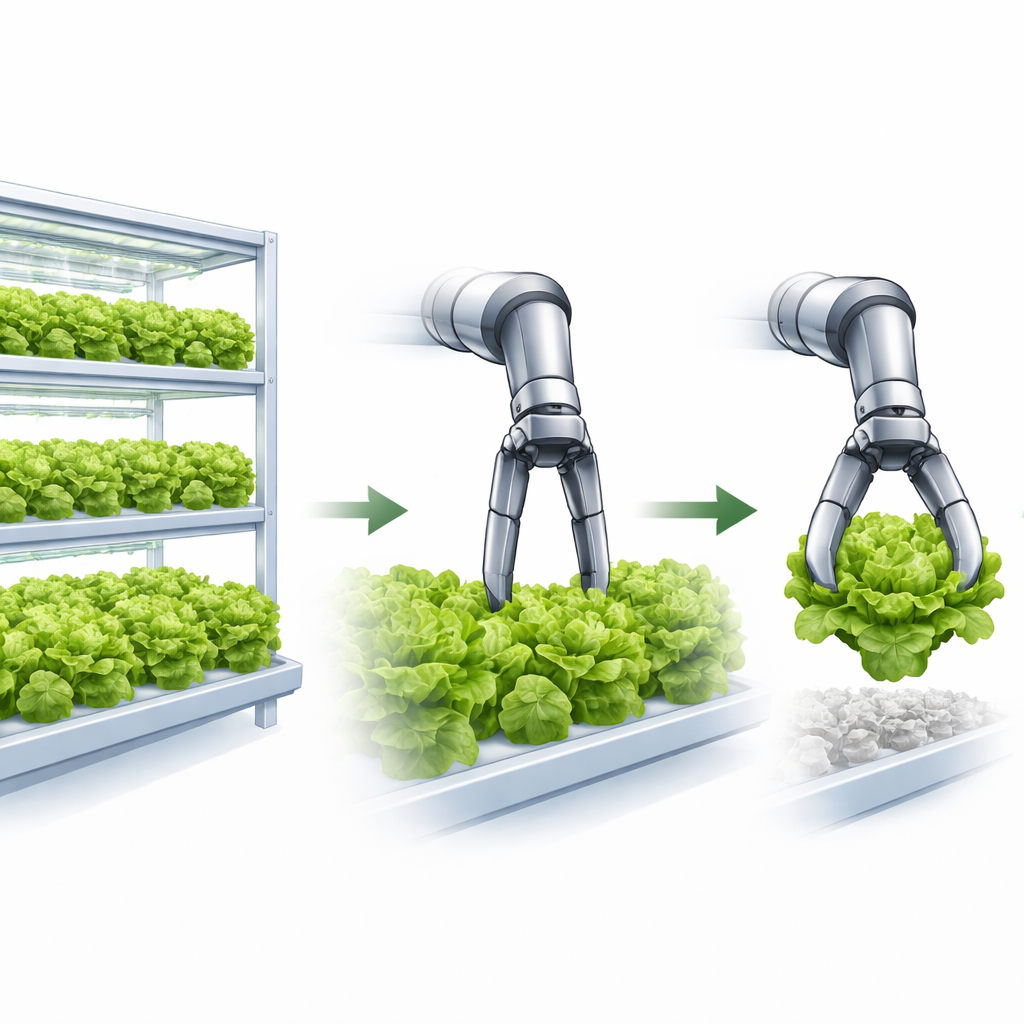
De echte proef vond plaats in een werkende verticale boerderij, waar de grijper meerdere bladgewassen behandelde: kristalsla, naibai, xiaobaicai, kailan en boerenkool. Voor bolvormige kroppen gebruikte de grijper een geringe vingerhoek en grotere afstand om de kop naar boven te scheppen en stevig vast te klemmen zonder naburige planten te schrapen. Voor parasolvormige groenten met hogere stelen werden de vingers verder gedraaid om onder het bladdek of rond de steel te reiken, waarbij de knijpafstand werd aangepast aan de plantmaat. In herhaalde proeven greep en hief het systeem alle testplanten succesvol zonder zichtbare schade of uitglijden, zelfs wanneer wortels niet gecentreerd waren of plantvormen varieerden. De onderzoekers demonstreerden ook een volledige oogststroom: een camera identificeerde welke kroppen klaar waren, de robot plukte ze, gaf ze door aan een speciaal wortelafsluithok, en bracht de getrimde koppen vervolgens naar een verzamelpunt.
Volgende stappen naar volledig geautomatiseerde bladgroenten
De studie laat zien dat een vormveranderende, zachtgetopte grijper de kloof kan overbruggen tussen fragiele planten en stijve machines, en zo zachte maar stabiele behandeling biedt voor verschillende bladgroenten in dichtbevolkte binnenkassen. Voor een leek is de kernboodschap dat robots niet langer lomp hoeven te zijn bij het omgaan met voedsel: door hun "vingertoppen" van vorm te laten veranderen, kunnen ze in krappe ruimtes glijden en elke plant bijna net zo voorzichtig wiegen als een menselijke werknemer. De auteurs merken op dat toekomstige verbeteringen — zoals slimmere visie, automatische afstemming van vingerhoeken, betere slipdetectie en ontwerpen gericht op hygiëne — nodig zullen zijn om commerciële snelheden te bereiken. Toch markeert dit werk een praktisch eerste stap richting volledig geautomatiseerde oogst die zowel het gewas als de kwaliteit van de salades die uiteindelijk op uw bord komen beschermt.
Bronvermelding: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
Trefwoorden: verticale landbouw, zachte robotica, bladgroenten, robotisch oogsten, landbouwautomatisering