Clear Sky Science · it
Una pinza conforme e morfante per gestire diverse verdure a foglia negli sistemi di agricoltura verticale
Perché i robot delicati contano per la tua insalata
Man mano che le città cercano modi per coltivare più cibo vicino a dove si consuma, le fattorie verticali — pile indoor di verdure a foglia — stanno diventando una componente importante dell'approvvigionamento urbano. Tuttavia, gran parte della raccolta in queste aziende ad alta tecnologia è ancora eseguita a mano, soprattutto per lattughe delicate e ortaggi asiatici le cui foglie si danneggiano facilmente. Questo articolo presenta un nuovo tipo di pinza robotica progettata specificamente per maneggiare tali verdure fragili in modo gentile e affidabile, aprendo la strada a una produzione locale più accessibile e resiliente.
Coltivare verso l'alto in spazi ristretti
In luoghi con scarsità di terreno come Singapore, i sistemi di agricoltura verticale impilano le colture su vassoi a più livelli, usando luce, acqua e nutrienti controllati con precisione per far crescere verdi uniformi e attraenti. Per massimizzare la resa, le piante su ciascun vassoio vengono lasciate crescere fino a quando le foglie si toccano e quasi coprono la superficie. Quel sovraffollamento è positivo per la resa ma problemático per le macchine: una pinza convenzionale ha poco spazio per infilarsi tra le piante, e una gestione goffa può lacerare le foglie, ridurre la durata di conservazione e diffondere contaminazioni. I lavoratori umani si adattano cambiando strumenti e movimenti della mano a seconda del tipo di coltura, ma questo rende la raccolta laboriosa, costosa e difficile da scalare.
Una punta che cambia forma su richiesta
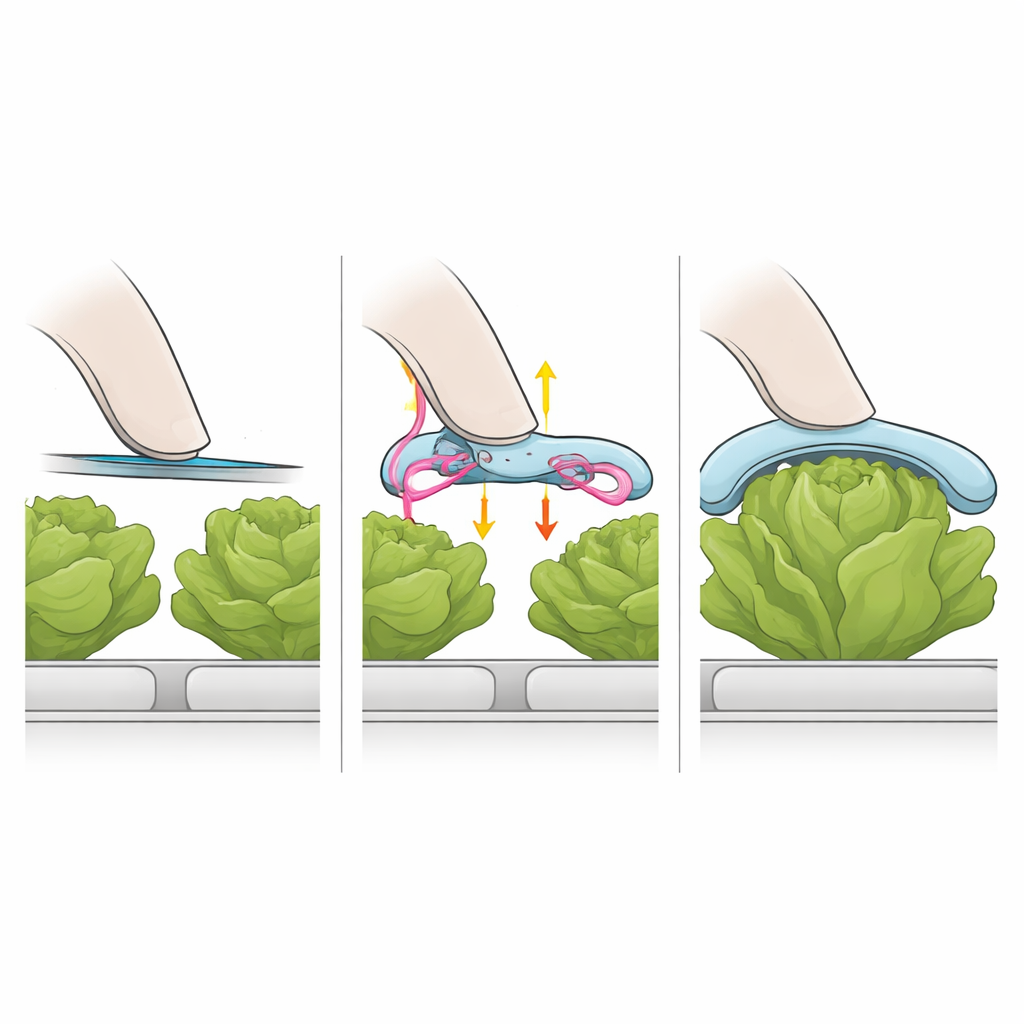
I ricercatori hanno sviluppato una pinza robotica a due dita le cui estremità possono cambiare forma per adattarsi al compito. Nello stato “compresso”, le punte sono sottili e piatte, in grado di scivolare nelle strette fessure tra teste di lattuga adiacenti. Una volta in posizione, cavi nascosti tirano una spina dorsale mobile all'interno di ciascuna dito, tendendo una lamina flessibile che si piega verso l'esterno formando un cuscinetto morbido ad arco. Questo cuscinetto espanso offre una superficie ampia e imbottita che si conforma delicatamente alla pianta. Ruotando le dita e regolando la loro distanza, la stessa pinza può pizzicare dai lati o raccogliere dal basso, avvolgendosi parzialmente intorno alla pianta come un paio di mani attente.
Testare come il tocco morbido incontra la presa salda
Per assicurarsi che la punta fosse sia delicata sia robusta, il team ha condotto una serie di esperimenti al banco. Hanno misurato come la lamina flessibile si piegava all'estendersi della spina interna e quanta forza la punta espansa esercitava quando veniva compressa a diverse profondità e angolazioni. Questi test hanno mostrato che la punta rimaneva morbida a piccole compressioni — importante per evitare lividi — ma poteva comunque resistere a spinte maggiori senza trasferire carichi improvvisi al motore. Usando una sfera stampata in 3D a simulare una testa di lattuga, i ricercatori hanno poi esplorato come la rotazione delle dita e la loro distanza influenzassero il peso massimo che la pinza poteva sostenere. Hanno scoperto che ottimizzare la geometria per evitare contatti a spigolo e distribuire il contatto su un'ampia area permetteva alla pinza di sollevare bersagli più pesanti limitando la deformazione della “verdura”.
Dal banco di prova alle file di una vera fattoria
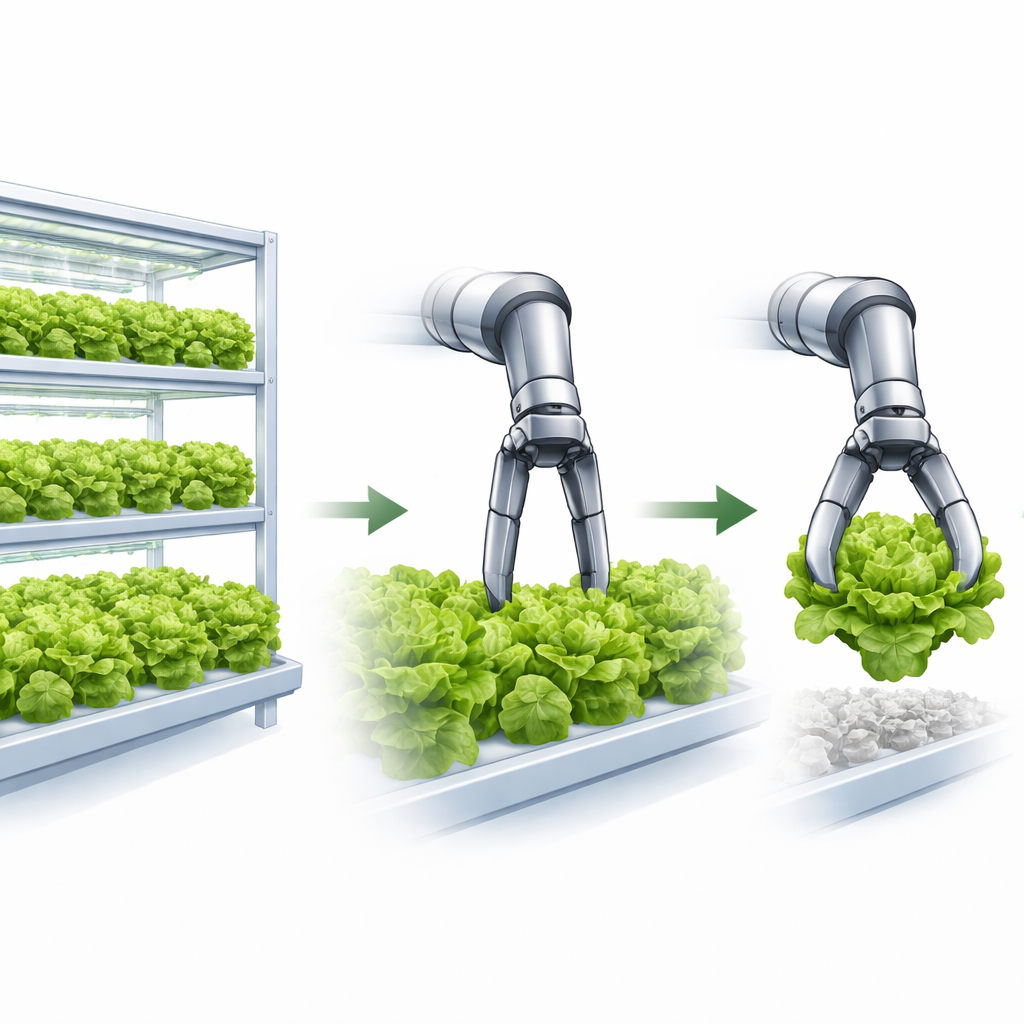
La prova sul campo è avvenuta in una fattoria verticale operativa, dove la pinza ha gestito diverse colture a foglia: lattughe a palla, naibai, xiaobaicai, kailan e cavolo riccio. Per le lattughe a forma sferica, la pinza ha usato un angolo moderato delle dita e una maggiore distanza per raccogliere e bloccare la testa in modo sicuro senza raschiare le piante vicine. Per i verdi ad ombrello con fusti più alti, le dita sono ruotate ulteriormente per raggiungere sotto la chioma o attorno al gambo, regolando la distanza di presa in base alla dimensione della pianta. In prove ripetute, il sistema ha afferrato e sollevato con successo tutte le piante testate senza danni visibili o scivolamenti, anche quando le radici erano decentrate o le forme delle piante variavano. I ricercatori hanno inoltre dimostrato un flusso di raccolta completo: una telecamera identificava le lattughe pronte, il robot le prelevava, le passava a una stazione personalizzata per il taglio delle radici e poi trasferiva le teste tagliate a un punto di raccolta.
Prossimi passi verso verdure completamente automatizzate
Lo studio mostra che una pinza morfante con punte morbide può colmare il divario tra piante fragili e macchine rigide, offrendo una gestione gentile ma stabile di diverse verdure a foglia in fattorie indoor affollate. Per il lettore non esperto, il messaggio principale è che i robot non devono più essere goffi nel trattare il cibo: permettendo alle loro “punte delle dita” di cambiare forma, possono infilarsi in spazi stretti e cullare ogni pianta quasi quanto un operaio umano. Gli autori osservano che saranno necessari miglioramenti futuri — come una visione più intelligente, la regolazione automatica degli angoli delle dita, una migliore rilevazione dello scivolamento e progettazioni attente all'igiene — per raggiungere velocità commerciali. Tuttavia, questo lavoro rappresenta un primo passo pratico verso una raccolta completamente automatizzata che protegge sia la coltura sia la qualità delle insalate che alla fine arrivano nel tuo piatto.
Citazione: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
Parole chiave: agricoltura verticale, robotica morbida, verdure a foglia, raccolta robotica, automazione agricola