Clear Sky Science · pt
Uma garra conformável e morfável para manuseio de hortaliças folhosas diversas em sistemas de agricultura vertical
Por que robôs delicados importam para sua salada
À medida que as cidades buscam formas de produzir mais alimento perto de casa, as fazendas verticais — pilhas internas de verduras folhosas — tornam-se parte importante do abastecimento urbano. Ainda assim, grande parte da colheita nessas fazendas de alta tecnologia é feita à mão, especialmente no caso de alfaces delicadas e verduras asiáticas cujas folhas machucam facilmente. Este artigo apresenta um novo tipo de garra robótica projetada especificamente para manusear essas hortaliças frágeis de forma gentil e confiável, abrindo caminho para uma produção local de alimentos mais acessível e resiliente.
Cultivar para cima em espaços apertados
Em lugares com pouco terreno, como Cingapura, sistemas de agricultura vertical agrupam culturas em camadas de bandejas, usando luz, água e nutrientes cuidadosamente controlados para cultivar verduras uniformes e atraentes. Para maximizar a produção, as plantas em cada bandeja flutuante crescem até que suas folhas se toquem e quase cubram a superfície. Esse adensamento é bom para rendimento, mas ruim para máquinas: uma garra convencional tem pouco espaço para se enfiar entre as plantas, e um manuseio desajeitado pode rasgar folhas, reduzir a vida útil e espalhar contaminação. Trabalhadores humanos se adaptam mudando ferramentas e movimentos de mão para cada tipo de cultura, mas isso torna a colheita intensiva em mão de obra, cara e difícil de escalar.
Uma ponta de dedo que muda de forma sob demanda
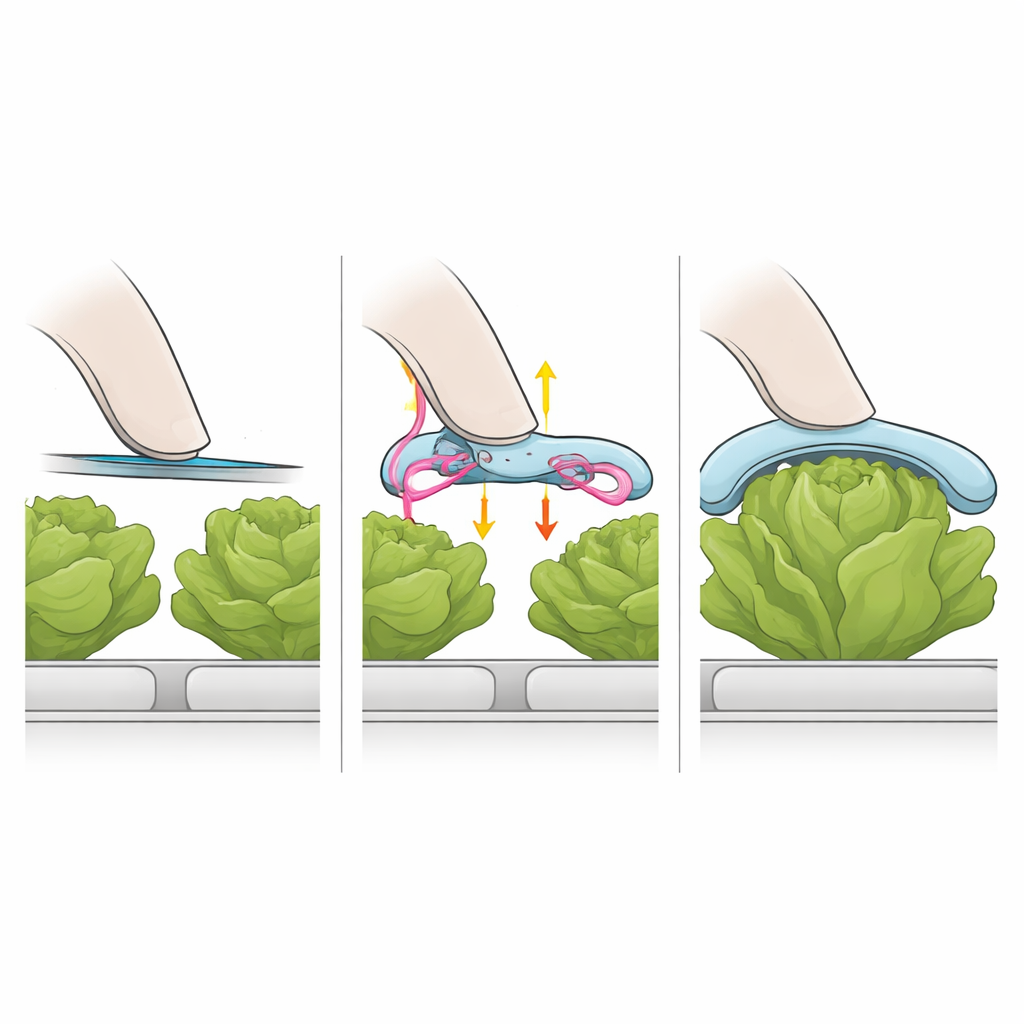
Os pesquisadores desenvolveram uma garra robótica de dois dedos cujas pontas podem mudar de forma para se adequar à tarefa. Em seu estado “colapsado”, as pontas são finas e planas, capazes de escorregar pelas fendas estreitas entre cabeças de alface vizinhas. Uma vez em posição, cabos embutidos puxam uma espinha móvel dentro de cada dedo, esticando uma folha flexível que se curva para fora formando um acolchoamento em forma de arco. Essa almofada expandida oferece uma superfície ampla e acolchoada que se molda suavemente à planta. Girando os dedos e ajustando a distância entre eles, a mesma garra pode tanto beliscar pelas laterais quanto escavar por baixo, envolvendo parcialmente a planta como um par de mãos cuidadosas.
Testando como o toque suave encontra a firmeza
Para garantir que a ponta fosse ao mesmo tempo macia e resistente, a equipe realizou uma série de experimentos de bancada. Mediram como a folha flexível se curvava à medida que a espinha interna se estendia e quanta força a ponta expandida exercia quando pressionada a diferentes profundidades e ângulos. Esses testes mostraram que a ponta permanecia macia em pequenas compressões — importante para evitar machucados — mas ainda podia resistir a empurrões maiores sem transferir cargas repentinas de volta ao motor. Usando uma esfera impressa em 3D para representar uma cabeça de alface, os pesquisadores então exploraram como a rotação e o espaçamento dos dedos afetavam o peso máximo que a garra podia suportar. Concluíram que ajustar a geometria para evitar contato com arestas afiadas e distribuir o toque por uma área ampla permitia levantar alvos mais pesados limitando a deformação da “hortaliça”.
Do banco de ensaios às filas reais da fazenda
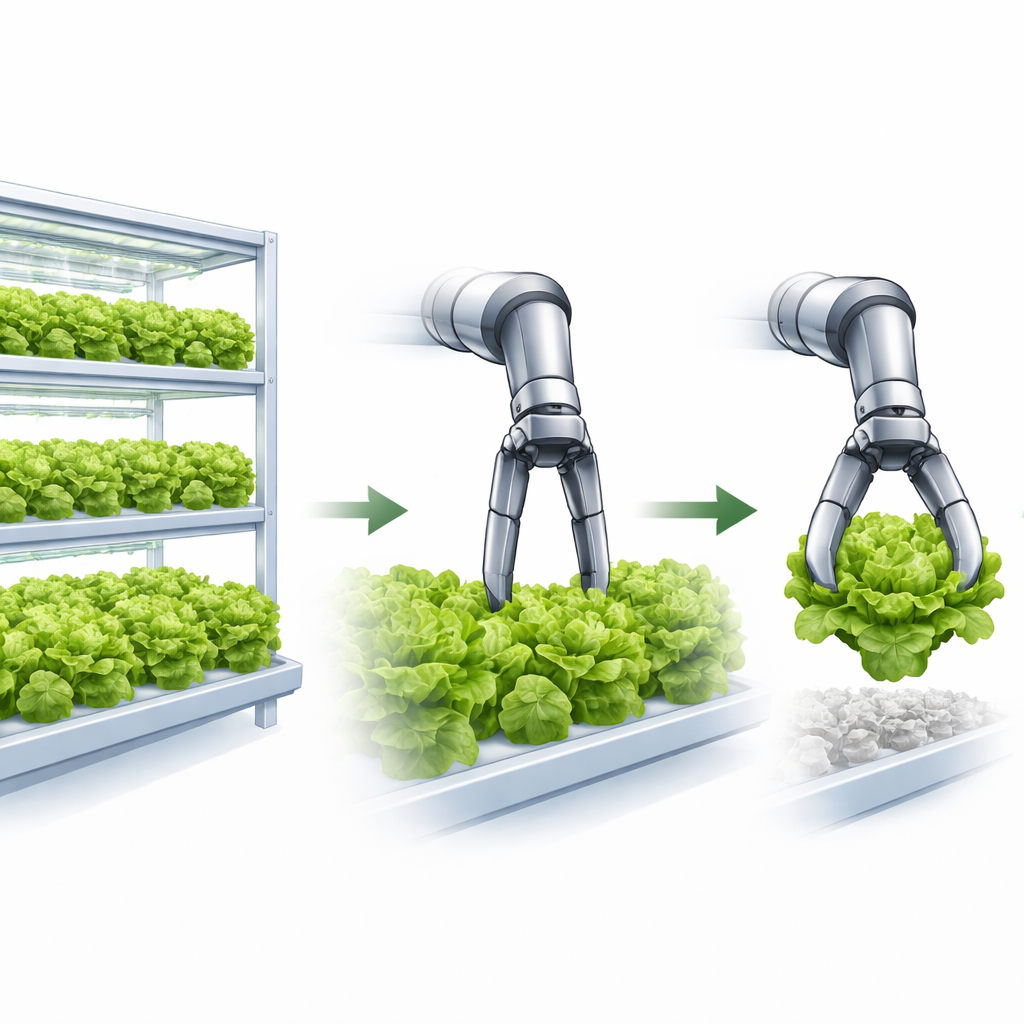
O teste real ocorreu em uma fazenda vertical em operação, onde a garra manipulou várias culturas folhosas: alfaces tipo cabeça, naibai, xiaobaicai, kailan e couve. Para alfaces em formato de bola, a garra usou um ângulo de dedo moderado e espaçamento maior para escavar e prender a cabeça com segurança sem raspar plantas vizinhas. Para verduras em forma de guarda-chuva com caules mais altos, os dedos giraram mais para alcançar sob o dossel de folhas ou ao redor do caule, ajustando a distância de pinça conforme o tamanho da planta. Em ensaios repetidos, o sistema agarrou e levantou com sucesso todas as plantas de teste sem danos visíveis ou escorregamento, mesmo quando as raízes estavam fora do centro ou as formas das plantas variavam. Os pesquisadores também demonstraram um fluxo completo de colheita: uma câmera identificava quais alfaces estavam prontas, o robô as recolhia, as passava para uma estação personalizada de poda de raízes e então movia as cabeças aparadas para um ponto de coleta.
Próximos passos rumo às folhas totalmente automatizadas
O estudo mostra que uma garra morfável com ponta macia pode preencher a lacuna entre plantas frágeis e máquinas rígidas, proporcionando um manuseio gentil e estável em diferentes hortaliças folhosas em fazendas internas densas. Para o leitor leigo, a mensagem principal é que os robôs não precisam mais ser desajeitados ao lidar com alimentos: ao permitir que suas “pontas de dedo” mudem de forma, eles podem escorregar em espaços apertados e acomodar cada planta quase tão cuidadosamente quanto um trabalhador humano. Os autores observam que melhorias futuras — como visão mais inteligente, ajuste automático dos ângulos dos dedos, melhor detecção de deslizamento e projetos que considerem saneamento — serão necessárias para atingir velocidades comerciais. Ainda assim, este trabalho marca um primeiro passo prático rumo a uma colheita totalmente automatizada que protege tanto a cultura quanto a qualidade das saladas que chegam ao seu prato.
Citação: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
Palavras-chave: agricultura vertical, robótica macia, hortaliças folhosas, colheita robótica, automação agrícola