Clear Sky Science · ru
Податливый морфирующий захват для обращения с разнообразными листовыми овощами в системах вертикального земледелия
Почему нежные роботы важны для вашего салата
По мере того как города ищут способы выращивать больше продуктов вблизи места потребления, вертикальные фермы — внутренние многоярусные грядки с листовой зеленью — становятся важной частью городского продовольственного снабжения. Однако значительная часть уборки на этих высокотехнологичных фермах по-прежнему выполняется вручную, особенно для деликатных салатов и азиатских зелёных культур, листья которых легко мнутся. В статье представлен новый тип роботизированного захвата, разработанный специально для бережного и надёжного обращения с такими хрупкими растениями, что открывает путь к более доступному и устойчивому локальному производству пищи.
Выращивание вверх в тесных помещениях
В местах с дефицитом земли, таких как Сингапур, системы вертикального земледелия размещают культуры на нескольких уровнях лотков, используя тщательно контролируемое освещение, воду и питательные вещества для получения ровной, привлекательной зелени. Чтобы максимизировать урожай, растения на каждой плавающей панели допускают рост до тех пор, пока их листья не соприкасаются и почти не покроют поверхность. Такая скученность полезна для урожайности, но проблемна для машин: обычному захвату трудно втиснуться между растениями, а неуклюжая обработка может порвать листья, сократить срок хранения и распространить загрязнения. Люди-рабочие приспосабливаются, меняя инструменты и движения рук под каждый вид культуры, но это делает уборку трудоёмкой, дорогостоящей и трудно масштабируемой.
Кончик пальца, меняющий форму по требованию
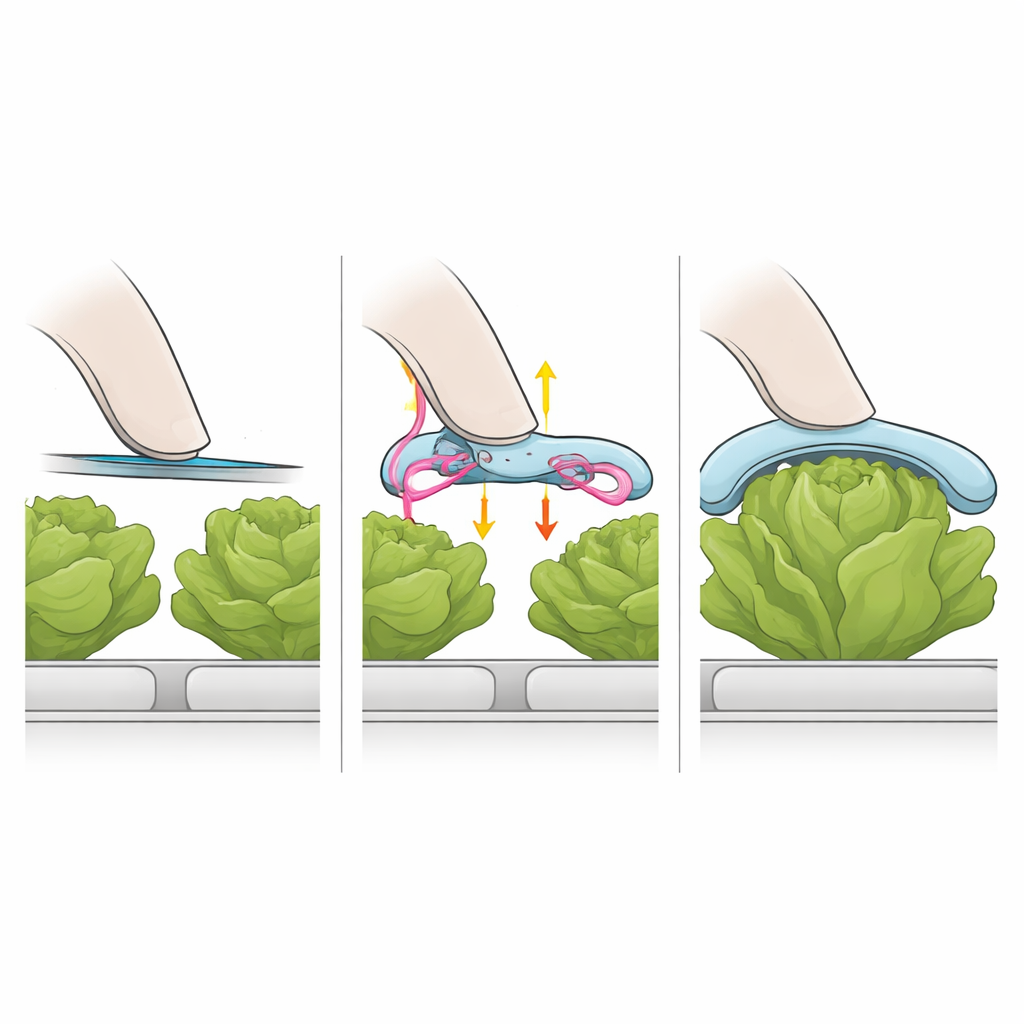
Исследователи разработали двухпальцевый роботизированный захват, кончики пальцев которого могут менять форму в зависимости от задачи. В «свернутом» состоянии кончики узкие и плоские, что позволяет им проскальзывать в узкие зазоры между соседними кочанами салата. Оказавшись на месте, скрытые тросы тянут подвижный «хребет» внутри каждого пальца, натягивая гибкую пластину, которая выгибается наружу в мягкую, лукоподобную подушку. Эта расширенная подушка обеспечивает широкую, амортизирующую поверхность, которая деликатно принимается по форме растения. Поворачивая пальцы и регулируя расстояние между ними, тот же захват может либо сжимать растения с боков, либо подчерпывать снизу, частично обвивая растение как пара осторожных рук.
Испытания: мягкое прикосновение и надёжное удержание
Чтобы убедиться, что кончик пальца одновременно мягкий и прочный, команда провела серию лабораторных экспериментов. Они измеряли, как гибкая пластина изгибается при выдвижении внутреннего «хребта», и какое усилие оказывает расширённый наконечник при нажатии на разную глубину и под разными углами. Эти тесты показали, что кончик остаётся мягким при небольших сжатиях — что важно для предотвращения синяков — но при этом способен противостоять более сильным воздействиям, не передавая внезапных ударных нагрузок назад к мотору. Используя 3D-печатный шар в роли «головы» салата, исследователи затем изучали, как поворот пальцев и расстояние между ними влияют на максимальный поднимаемый вес. Они обнаружили, что настройка геометрии для избежания контакта острыми краями и распределения касания на большую площадь позволяет захвату поднимать более тяжёлые объекты, ограничивая при этом деформацию «овоща».
От лабораторного стола к настоящим грядам
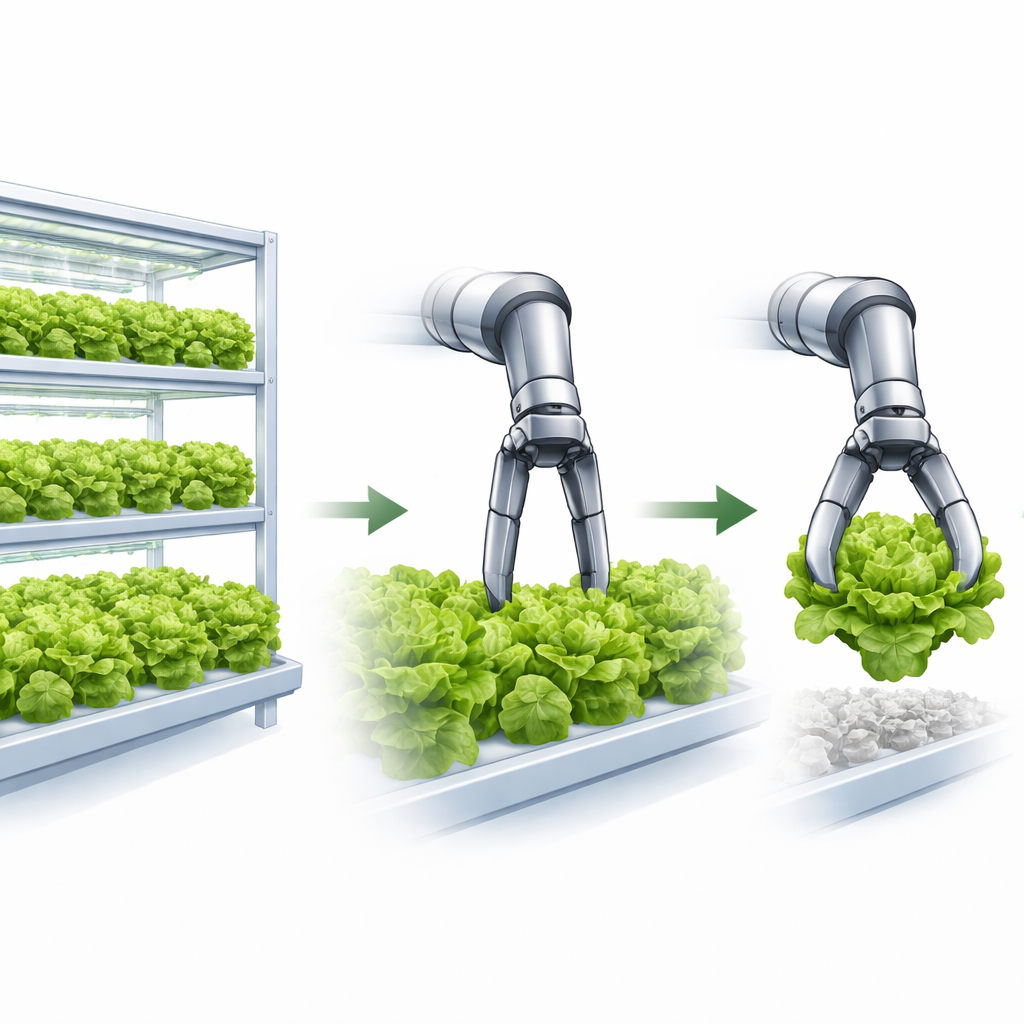
Реальное испытание прошло на работающей вертикальной ферме, где захват обслуживал несколько листовых культур: кристальные салаты, найбай, сяобацаи, кайлан и капусту кейл. Для шаровидных кочанов захват использовал умеренный угол пальцев и большее расстояние между ними, чтобы подчерпнуть и зажать кочан надёжно, не задевая соседние растения. Для зонтичных зелёных с более высокими стеблями пальцы поворачивались дальше, чтобы дотянуться под крону листьев или обойти стебель, регулируя дистанцию захвата под размер растения. В повторных испытаниях система успешно захватывала и поднимала все тестовые растения без видимых повреждений или проскальзывания, даже когда корни были смещены от центра или формы растений варьировались. Исследователи также продемонстрировали полный поток сбора: камера определяла, какие салаты готовы, робот их снимал, передавал на специализированную станцию подрезки корней, а затем перемещал обработанные головы в точку сбора.
Следующие шаги к полностью автоматизированной зелени
Исследование показывает, что морфирующийся захват с мягкими наконечниками может преодолеть разрыв между хрупкими растениями и жёсткими машинами, обеспечивая бережное и в то же время стабильное обращение с разными листовыми овощами в густонаселённых закрытых фермах. Для непосвящённого читателя главный вывод таков: роботы больше не обязаны быть неуклюжими при работе с продуктами питания — позволяя «кончикам пальцев» менять форму, они могут вкрадываться в узкие промежутки и поддерживать каждое растение почти так же аккуратно, как человек. Авторы отмечают, что для достижения коммерческой производительности потребуются дальнейшие улучшения — более продвинутый обзор зрения, автоматическая настройка углов пальцев, лучшее обнаружение проскальзывания и конструкции, учитывающие санитарные требования. Тем не менее эта работа отмечает практический первый шаг к полностью автоматизированной уборке, которая защищает и урожай, и качество салатов, в конечном счёте попадающих на вашу тарелку.
Цитирование: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
Ключевые слова: вертикальное земледелие, мягкая робототехника, листовые овощи, роботизированная уборка, сельскохозяйственная автоматизация