Clear Sky Science · tr
Dikey tarım sistemlerinde çeşitli yapraklı sebzelerin işlenmesi için uyumlu, biçim değiştiren bir kavrayıcı
Neden nazik robotlar salatanız için önemli?
Şehirler evlere yakın daha fazla gıda yetiştirmenin yollarını ararken, iç içe dizilmiş yapraklı yeşilliklerden oluşan dikey çiftlikler kentsel gıda arzının önemli bir parçası haline geliyor. Yine de bu yüksek teknolojili çiftliklerdeki hasadın büyük bölümü hâlâ özellikle yaprakları kolayca ezilen hassas marul ve Asya yeşillikleri gibi ürünler için elle yapılıyor. Bu çalışma, hassas sebzeleri nazik ve güvenilir şekilde işlemek üzere özel olarak tasarlanmış yeni bir robot kavrayıcı türünü tanıtıyor ve daha uygun maliyetli, dayanıklı yerel gıda üretiminin önünü açıyor.
Sıkışık alanlarda yukarı doğru tarım
Singapur gibi arazi kıtlığı olan yerlerde, dikey tarım sistemleri mahsulleri tepsiler katmanına yerleştirir; kontrollü ışık, su ve besinlerle uniform, cazip yeşillikler yetiştirilir. Verimi maksimize etmek için her yüzeydeki bitkilerin yaprakları birbirine değip neredeyse yüzeyi kaplayana kadar büyümelerine izin verilir. Bu sıkışıklık verim için iyi olsa da makineler için kötüdür: geleneksel bir kavrayıcının bitkiler arasına sokulmak için çok az boşluğu vardır ve kaba muamele yaprakları yırtabilir, raf ömrünü kısaltabilir ve kontaminasyonu yayabilir. İnsan işçiler her mahsul türü için aletleri ve el hareketlerini değiştirerek uyum sağlar, ancak bu hasadı emek yoğun, maliyetli ve ölçeklenmesi zor hale getirir.
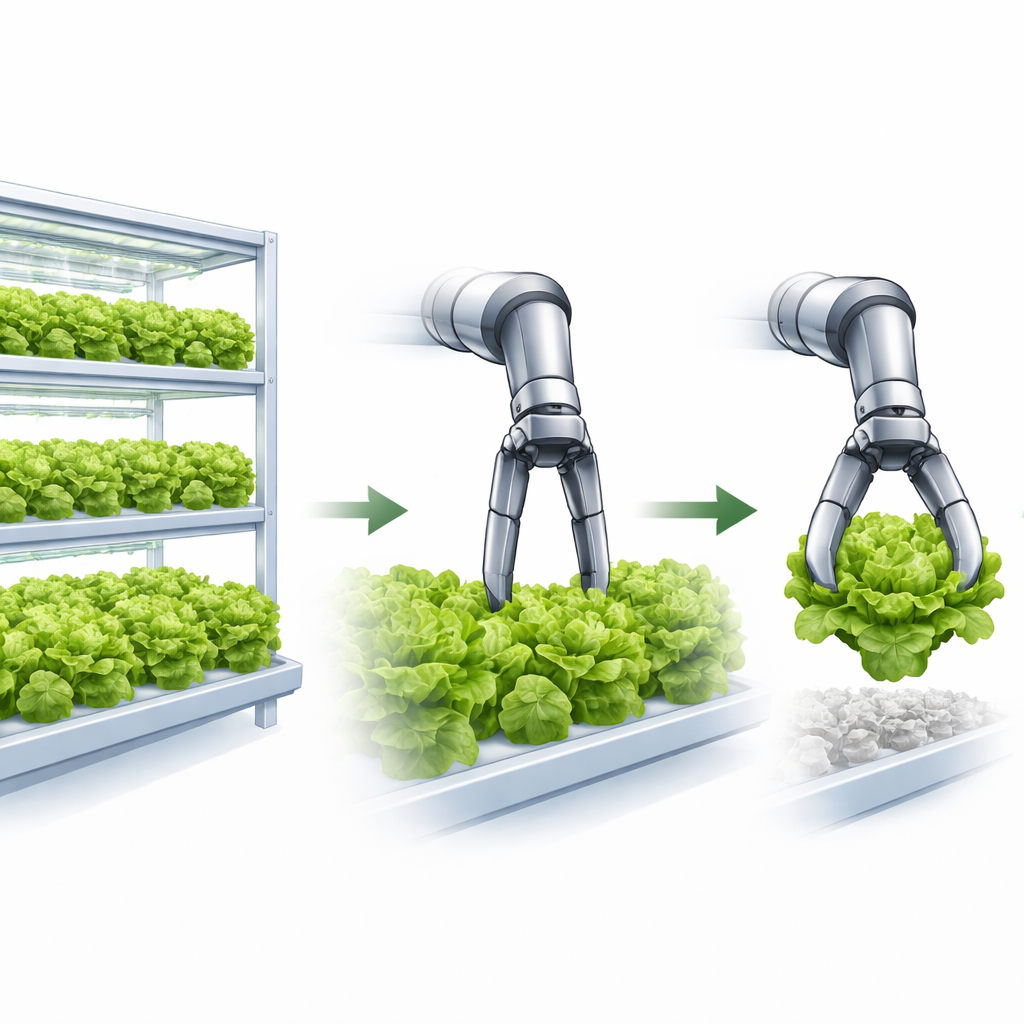
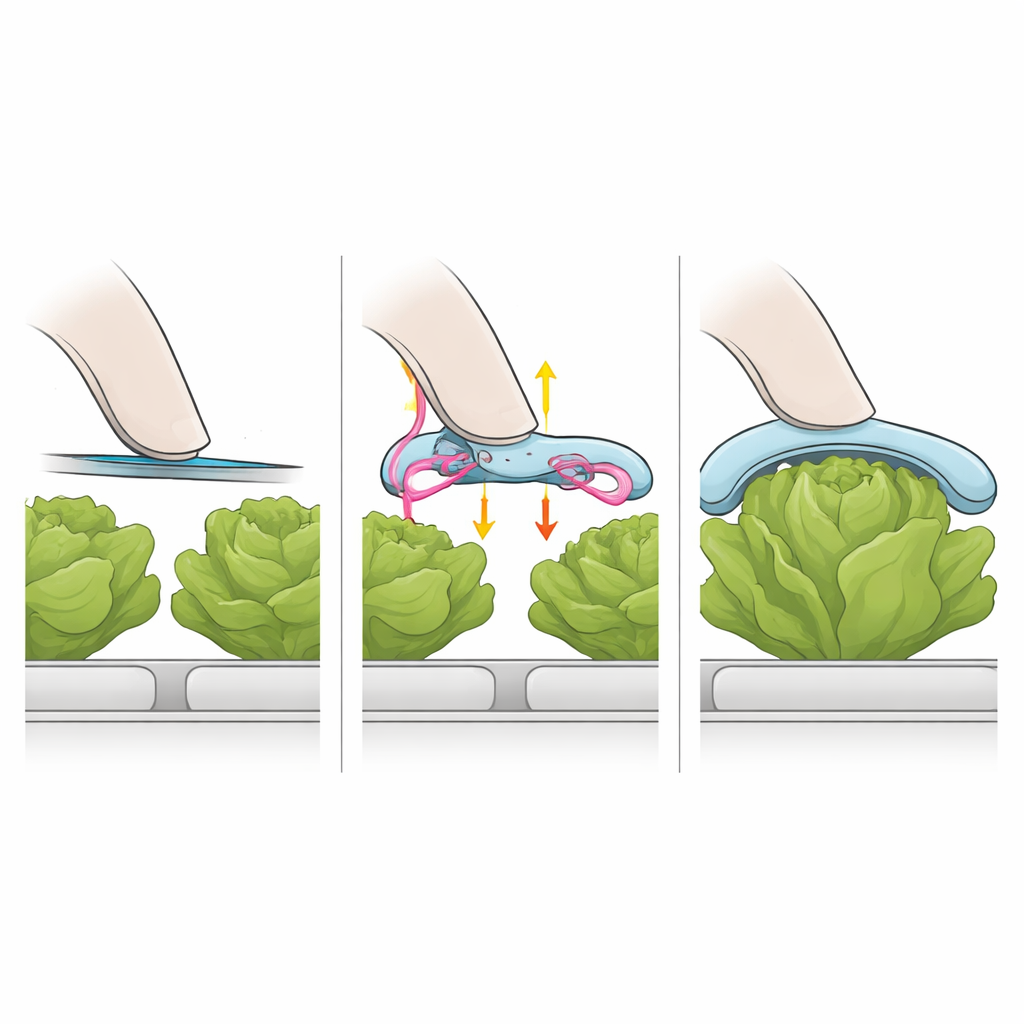
İstendiğinde şekil değiştiren bir parmak ucu
Araştırmacılar, parmak uçları işi karşılayacak şekilde şekil değiştirebilen iki parmaklı bir robot kavrayıcı geliştirdiler. "Çökmüş" durumda uçlar ince ve düz olup, komşu marul başları arasındaki dar boşluklara kayabilir. Konumuna girdikten sonra gizli kablolar her parmağın içindeki hareketli bir omurgayı çekerek esnek bir tabakayı gerer ve dışa doğru kavislenen yumuşak bir ped oluşturur. Bu genişlemiş ped, bitkiye nazikçe uyum sağlayan geniş, yastıklı bir yüzey sunar. Parmakları döndürerek ve aralarındaki mesafeyi ayarlayarak aynı kavrayıcı ya yandan sıkma ya da alttan kepçeleme yapabilir; bitkiyi dikkatli eller gibi kısmen sarar.
Yumuşak dokunuş ile sağlam tutuşun test edilmesi
Parmak ucunun hem nazik hem de güçlü olduğundan emin olmak için ekip bir dizi tezgah üstü deney gerçekleştirdi. İç omurga uzadıkça esnek tabakanın nasıl büküldüğünü ve genişlemiş ucun farklı derinliklere ve farklı açılara bastırıldığında ne kadar kuvvet uyguladığını ölçtüler. Bu testler, parmak ucunun küçük sıkışmalarda yumuşak kaldığını—ezilmeleri önlemek için önemli—ama aynı zamanda ani yükleri motora aktarmadan daha büyük itmelere direnç gösterebildiğini ortaya koydu. Marul başını temsil etmek üzere 3B yazdırılmış bir top kullanılarak araştırmacılar daha sonra parmak dönüşü ve aralığın kavrayıcının tutabileceği maksimum ağırlığı nasıl etkilediğini incelediler. Keskin kenar temasını önleyecek ve temasın geniş bir alana yayılmasını sağlayacak şekilde geometrinin ayarlanmasının, kavrayıcının daha ağır hedefleri kaldırmasına izin verirken "sebzenin" deformasyonunu sınırladığını buldular.
Laboratuvar tezgahından gerçek çiftlik sıralarına
Gerçek sınama, kavrayıcının kristal marullar, naibai, xiaobaicai, kailan ve lahana gibi birkaç yapraklı ürünü işlediği çalışan bir dikey çiftlikte yapıldı. Küre biçimli marullar için kavrayıcı, komşu bitkileri çizmeden başı güvenli şekilde kepçeleyip sıkmak için ılımlı bir parmak açısı ve daha geniş bir aralık kullandı. Daha uzun saplı şemsiye biçimli yeşillikler için parmaklar yaprak siperinin altına veya sapın etrafına ulaşmak üzere daha fazla döndü ve sıkma mesafesini bitki boyuna göre ayarladı. Tekrarlanan denemelerde sistem, kökler merkezi dışında olsa ya da bitki şekilleri değişse bile test edilen tüm bitkileri görünür hasar veya kayma olmadan başarılı şekilde kavrayıp kaldırdı. Araştırmacılar ayrıca tam bir hasat akışını gösterdiler: bir kamera hangi marulların hasada hazır olduğunu tespit etti, robot onları aldı, özel bir kök kırpma istasyonuna verdi ve kırpılmış başları toplama noktasına taşıdı.
Tam otomatik yeşilliklere doğru sonraki adımlar
Çalışma, biçim değiştiren, yumuşak uçlu bir kavrayıcının hassas bitkiler ile sert makineler arasındaki boşluğu kapatabileceğini, sıkışık iç çiftliklerde farklı yapraklı sebzeler için nazik ama kararlı bir tutuş sağlayabileceğini gösteriyor. Bir okuyucu için çıkarılacak ders şudur: robotlar artık gıdayla uğraşırken sakar olmak zorunda değil; "parmak uçlarının" şekil değiştirmesine izin vererek dar boşluklara girip her bitkiyi neredeyse insan bir işçi kadar dikkatle kavrayabilirler. Yazarlar, ticari hızlara ulaşmak için daha akıllı görme sistemleri, parmak açılarını otomatik ayarlama, daha iyi kayma algılama ve hijyen odaklı tasarımlar gibi gelecekteki iyileştirmelere ihtiyaç duyulacağını belirtiyor. Yine de bu çalışma, ürünü ve sonunda tabağınıza ulaşacak salataların kalitesini koruyan tam otomatik hasada doğru pratik bir ilk adımı işaret ediyor.
Atıf: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
Anahtar kelimeler: dikey tarım, yumuşak robotik, yapraklı sebzeler, robotik hasat, tarımsal otomasyon