Clear Sky Science · sv
En följsam, formförändrande gripare för hantering av olika bladgrönsaker i vertikala odlingssystem
Varför skonsamma robotar betyder något för din sallad
När städer söker sätt att odla mer mat nära där människor bor blir vertikala gårdar—inomhusstackar med bladgrönsaker—en viktig del av den urbana livsmedelsförsörjningen. Ändå skördas mycket i dessa högteknologiska farmer fortfarande för hand, särskilt känsliga salladssorter och asiatiska bladgrönsaker vars blad lätt får blåmärken. Denna artikel presenterar en ny typ av robotgripare som är särskilt utformad för att hantera sådana ömtåliga grönsaker skonsamt och pålitligt, vilket öppnar dörren för mer prisvärd och motståndskraftig lokal livsmedelsproduktion.
Odling uppåt på trång yta
I markbegränsade områden som Singapore packas grödor i vertikala odlingssystem på flera våningar av brickor, där ljus, vatten och näring kontrolleras noggrant för att odla enhetliga, tilltalande gröna blad. För att maximera avkastningen får växterna på varje flytande bricka växa tills bladen rör vid varandra och nästan täcker ytan. Denna trängsel är bra för skörden men problematisk för maskiner: en konventionell gripare har liten plats att klämma sig in mellan plantor, och klumpig hantering kan riva blad, förkorta hållbarheten och sprida kontaminering. Människor anpassar sig genom att byta verktyg och handrörelser för varje grödatyp, men det gör skörd arbetsintensiv, kostsam och svår att skala upp.
En fingertopp som ändrar form på begäran
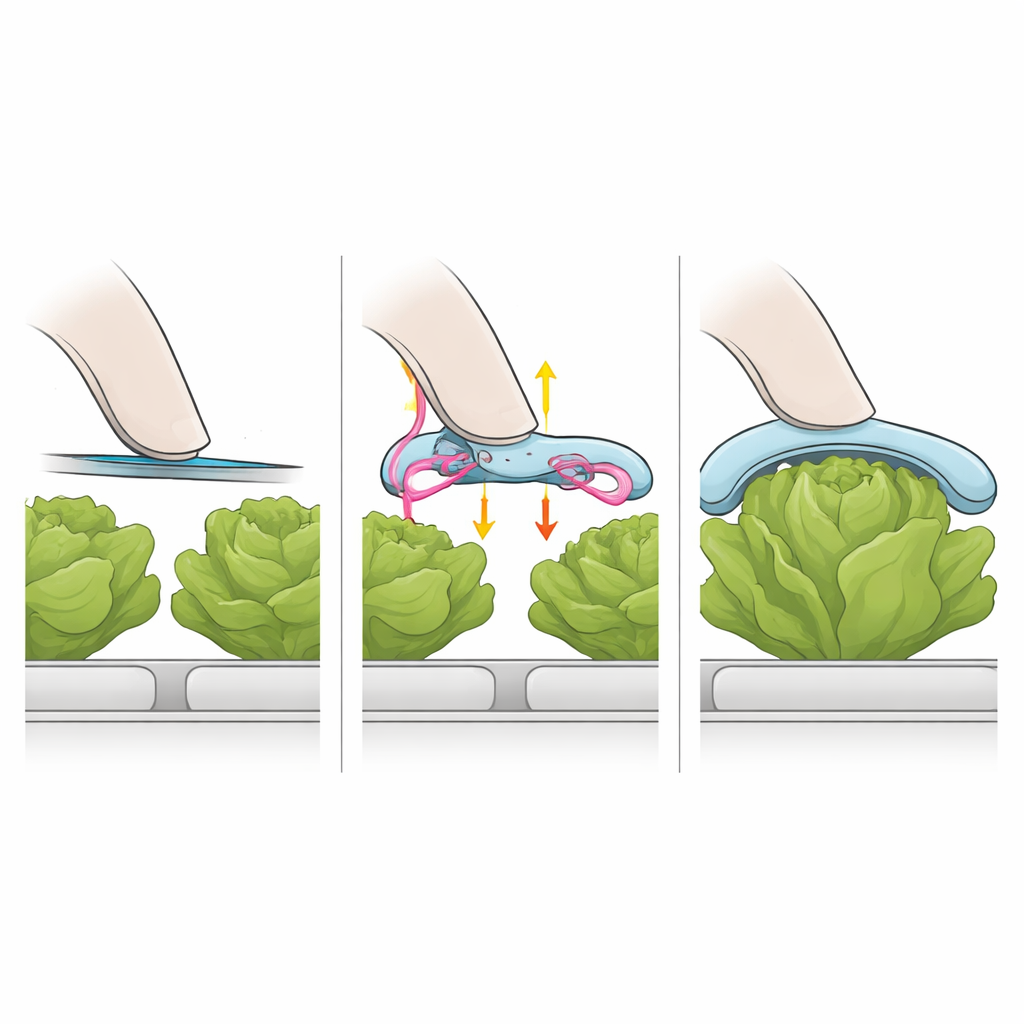
Forskarna utvecklade en tvåfingrad robotgripare vars fingertoppar kan ändra form för att passa uppgiften. I sitt "kollapsade" läge är spetsarna smala och platta, så att de kan glida in i de smala mellanrummen mellan intilliggande salladshuvuden. När de väl är på plats drar dolda kablar i en rörlig ryggrad inuti varje finger, vilket sträcker ut ett flexibelt skikt som böjer sig utåt till en mjuk, bågformad dyna. Denna utvidgade dyna erbjuder en bred, dämpad yta som varsamt anpassar sig efter plantan. Genom att rotera fingrarna och justera avståndet mellan dem kan samma gripare antingen nypa från sidorna eller skopa underifrån, delvis omsluta plantan som ett par försiktiga händer.
Testning av hur mjuk beröring möter fast grepp
För att säkerställa att fingertoppen var både skonsam och stark genomförde teamet en serie bänktester. De mätte hur det flexibla skiktet böjde sig när den inre ryggraden förlängdes, och hur mycket kraft den utvidgade spetsen utövade när den pressades till olika djup och vinklar. Dessa tester visade att fingertoppen förblev mjuk vid små kompressioner—viktigt för att undvika blåmärken—men ändå kunde motstå större påfrestningar utan att överföra plötsliga laster tillbaka till motorn. Med en 3D-printad kula som ersättning för ett salladshuvud undersökte forskarna hur fingerrotation och mellanrum påverkade den maximala vikten griparen kunde hålla. De fann att geometrisk anpassning för att undvika skarpa kantkontakter och sprida trycket över ett stort område gjorde det möjligt för griparen att lyfta tyngre föremål samtidigt som deformationen av "grönsaken" begränsades.
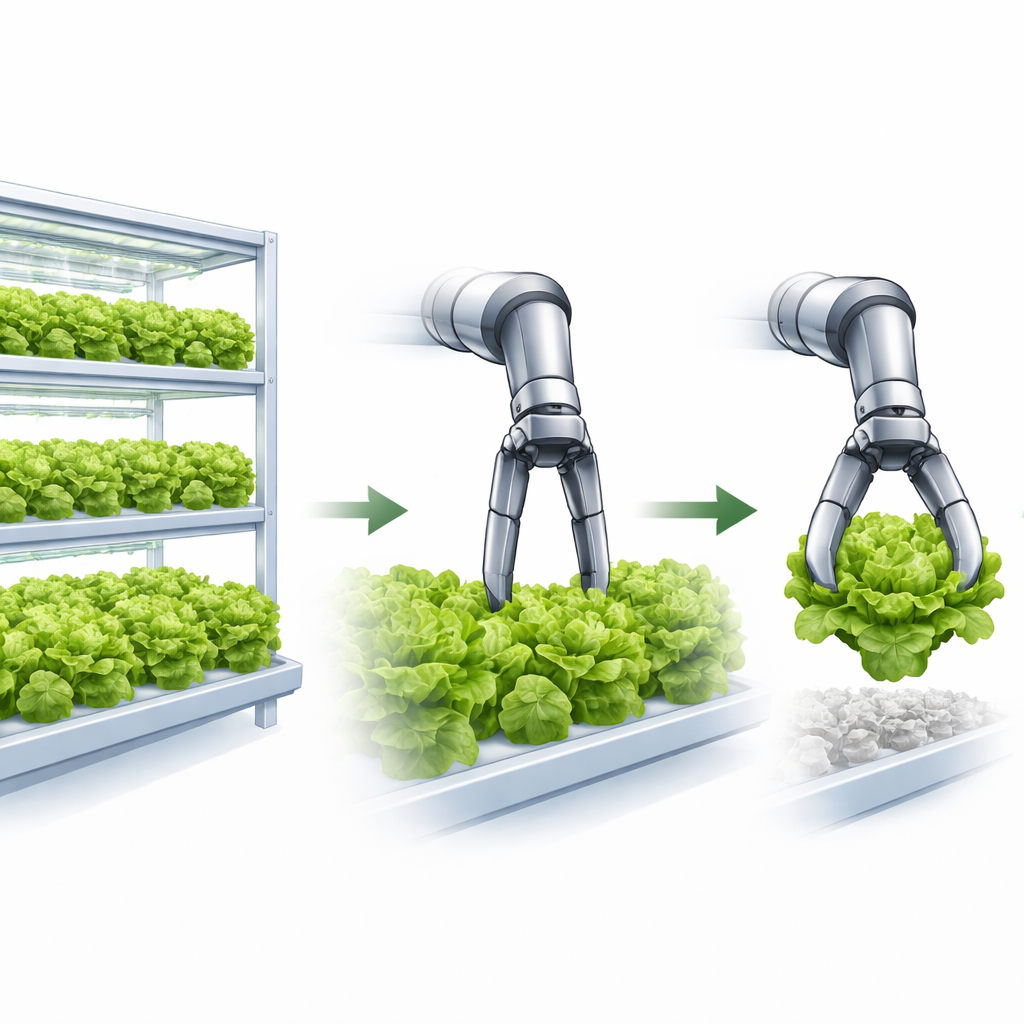
Från labb-bänk till verkliga odlingsrader
Det verkliga testet skedde i en fungerande vertikal gård, där griparen hanterade flera bladgrödor: krispsallader, naibai, xiaobaicai, kailan och grönkål. För bollformade sallader använde griparen en måttlig fingervinkel och större mellanrum för att skopa upp och klämma fast huvudet säkert utan att skrapa intilliggande plantor. För paraplyformade blad med högre stjälkar roterade fingrarna mer för att nå under bladtaket eller runt stammen, och justerade nypavståndet efter plantans storlek. I upprepade försök grep och lyfte systemet alla testplantor utan synliga skador eller halkningar, även när rötterna satt excentriskt eller plantformerna varierade. Forskarna demonstrerade också ett komplett skördeflöde: en kamera identifierade vilka sallader som var klara, roboten plockade dem, förde dem till en specialanpassad rottrimmerstation och flyttade sedan de trimmade huvuden till en uppsamlingspunkt.
Nästa steg mot fullt automatiserade grönsaker
Studien visar att en formförändrande gripare med mjuka spetsar kan överbrygga klyftan mellan känsliga växter och styva maskiner och erbjuda skonsam men stabil hantering av olika bladgrönsaker i trånga inomhusfarmer. För en lekmannaläsare är huvudbudskapet att robotar inte längre behöver vara klumpiga när de hanterar livsmedel: genom att låta sina "fingertoppar" ändra form kan de glida in i trånga utrymmen och omsluta varje planta nästan lika omsorgsfullt som en mänsklig arbetare. Författarna noterar att framtida förbättringar—såsom smartare syn, automatisk justering av fingervinklar, bättre halkdetektion och designs som tar hänsyn till sanitet—kommer att behövas för att nå kommersiella hastigheter. Ändå markerar detta arbete ett praktiskt första steg mot fullautomatiserad skörd som skyddar både grödan och kvaliteten på salladerna som så småningom når din tallrik.
Citering: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
Nyckelord: vertikal odling, mjukrobotik, bladgrönsaker, robotisk skörd, jordbrukets automatisering