Clear Sky Science · pl
Kompatybilny, morfujący chwytak do obsługi różnych warzyw liściastych w systemach rolnictwa wertykalnego
Dlaczego delikatne roboty mają znaczenie dla twojej sałatki
W miarę jak miasta szukają sposobów na uprawę większej ilości żywności blisko miejsca zamieszkania, farmy wertykalne — wewnętrzne warstwy liściastych warzyw — stają się ważną częścią miejskich dostaw żywności. Jednak wiele zbiorów na tych zaawansowanych technologicznie farmach jest wciąż wykonywanych ręcznie, zwłaszcza w przypadku delikatnych sałat i azjatyckich warzyw, których liście łatwo się bruisują. Artykuł przedstawia nowy typ chwytaka robotycznego zaprojektowanego specjalnie do łagodnej i niezawodnej obsługi takich kruchych warzyw, otwierając drogę do bardziej przystępnej i odpornej lokalnej produkcji żywności.
Uprawa w górę w ciasnych przestrzeniach
W miejscach o ograniczonym dostępie do ziemi, takich jak Singapur, systemy upraw wertykalnych rozmieszczają uprawy na piętrach tac, wykorzystując precyzyjnie kontrolowane światło, wodę i składniki odżywcze do uzyskania jednolitych, atrakcyjnych zieleni. Aby zmaksymalizować plony, rośliny na każdej pływającej tacy rosną aż ich liście stykają się i niemal pokrywają powierzchnię. To zagęszczenie jest korzystne dla wydajności, ale utrudnia pracę maszyn: konwencjonalny chwytak ma mało miejsca, by wcisnąć się między rośliny, a niezdarne obchodzenie się z nimi może rozrywać liście, skracać trwałość i szerzyć zanieczyszczenia. Ludzie dostosowują narzędzia i ruchy dłoni do każdego typu rośliny, lecz sprawia to, że zbiór jest pracochłonny, kosztowny i trudny do skalowania.
Końcówka palca, która zmienia kształt na żądanie
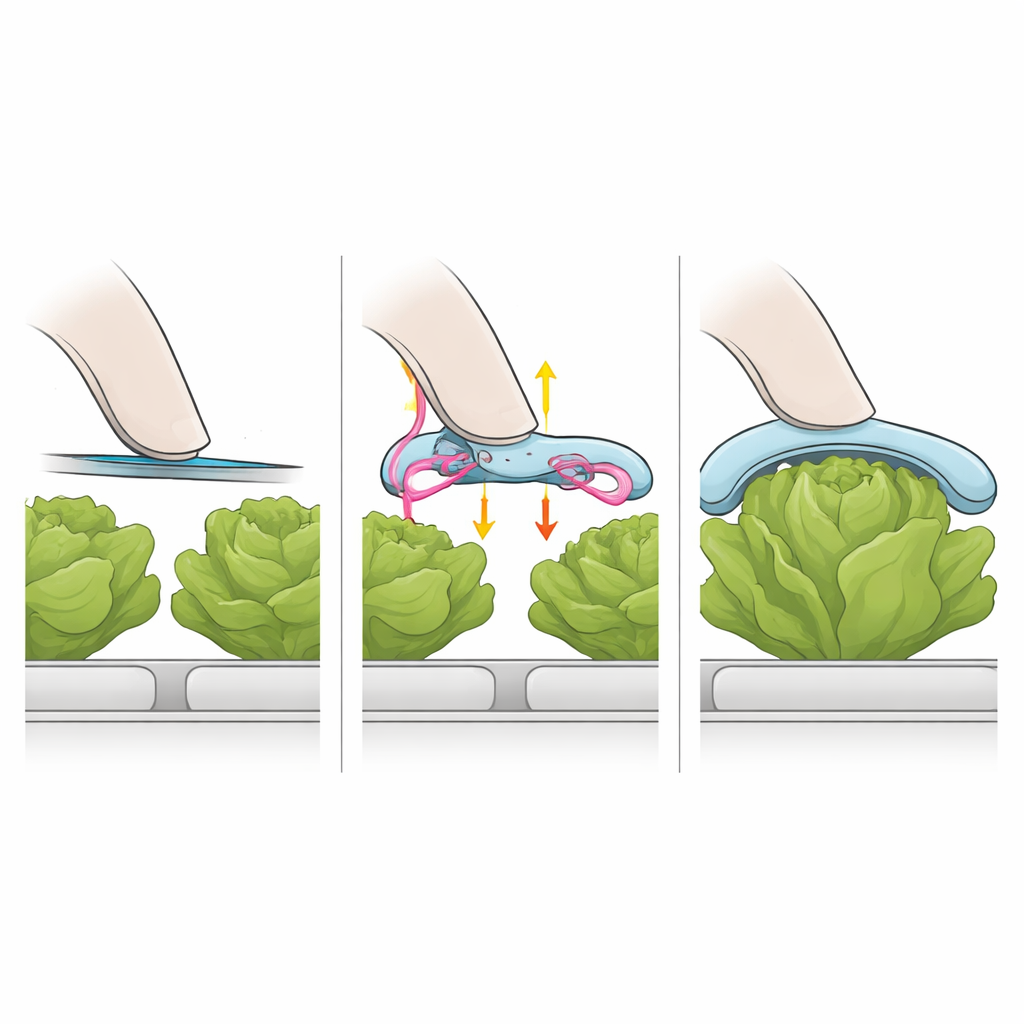
Naukowcy opracowali dwupalczasty chwytak robotyczny, którego końcówki palców potrafią zmieniać kształt, by dopasować się do zadania. W stanie „złożonym” końcówki są wąskie i płaskie, mogą wsunąć się w ciasne szczeliny między sąsiednimi główkami sałaty. Gdy są już na miejscu, ukryte linki ciągną ruchome „kręgosłupy” wewnątrz każdego palca, rozciągając elastyczną powłokę, która wygina się na zewnątrz w miękką, łukowatą poduszkę. Ta rozszerzona poduszka oferuje szeroką, amortyzowaną powierzchnię, która delikatnie dopasowuje się do rośliny. Obracając palcami i regulując ich rozstaw, ten sam chwytak może albo szczypać z boków, albo nabierać od spodu, częściowo owijać się wokół rośliny niczym para ostrożnych dłoni.
Testowanie, jak miękki dotyk łączy się z pewnym chwytaniem
Aby upewnić się, że końcówka palca jest zarówno delikatna, jak i wytrzymała, zespół przeprowadził serię eksperymentów laboratoryjnych. Mierzono, jak elastyczna powłoka wygina się wraz z wydłużaniem wewnętrznego „kręgosłupa” oraz jaką siłę wywiera rozciągnięta końcówka przy różnych głębokościach nacisku i kątach. Testy wykazały, że końcówka pozostaje miękka przy małych kompresjach — co jest ważne, by unikać stłuczeń — ale potrafi też przeciwstawić się większym naciskom bez przekazywania nagłych obciążeń z powrotem na silnik. Używając wydrukowanej w 3D kulki jako zamiennika główki sałaty, badacze zbadali następnie, jak rotacja palców i ich rozstaw wpływają na maksymalny ciężar, jaki chwytak może utrzymać. Stwierdzili, że dopasowanie geometrii tak, by unikać kontaktu ostrymi krawędziami i rozkładać dotyk na szerokiej powierzchni, pozwala chwytakowi podnosić cięższe obiekty przy jednoczesnym ograniczaniu odkształceń „warzywa”.
Z laboratorium na prawdziwe rzędy w farmie
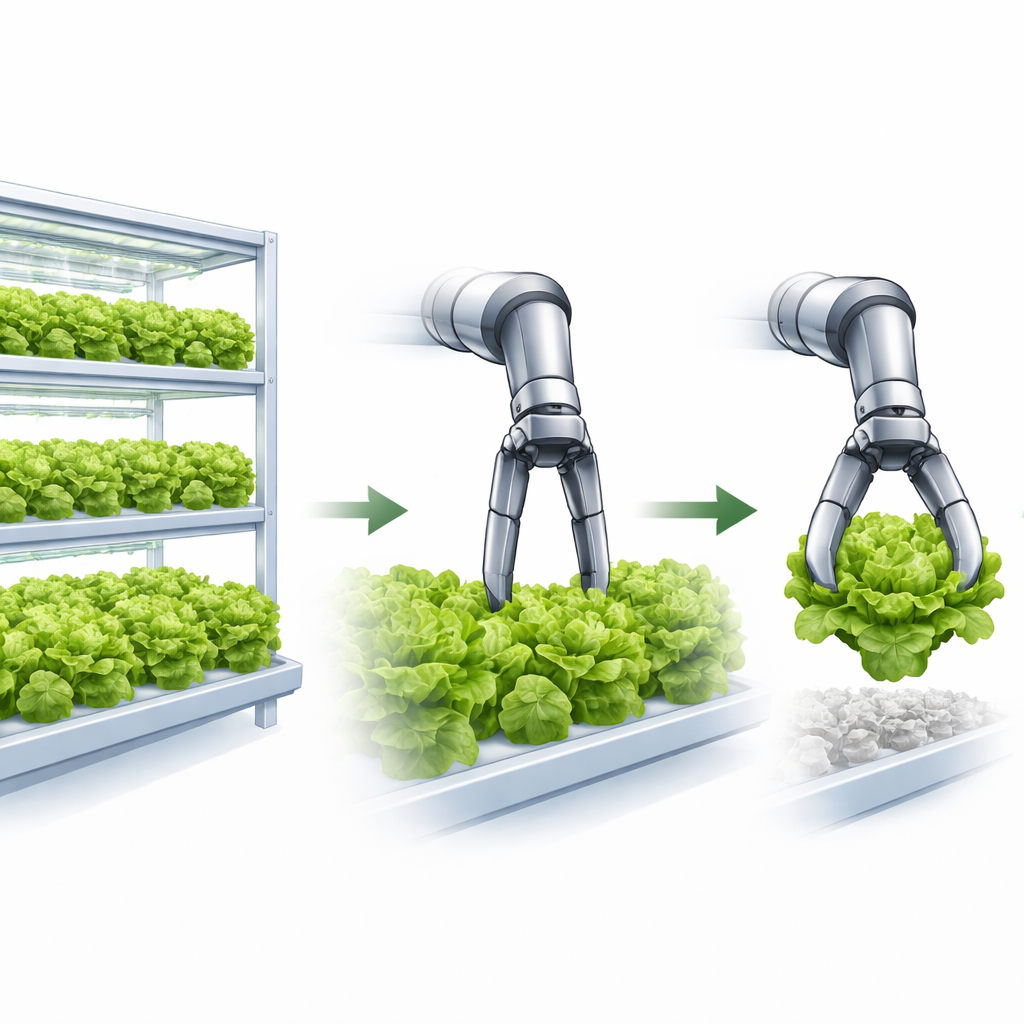
Prawdziwy test odbył się na działającej farmie wertykalnej, gdzie chwytak obsługiwał kilka upraw liściastych: sałaty krystaliczne, naibai, xiaobaicai, kailan i jarmuż. Dla kulistych sałat chwytak używał umiarkowanego kąta palców i większego rozstawu, by nabrać i pewnie zaciąć główkę bez ocierania sąsiednich roślin. Dla roślin o parasolowatym pokroju z wyższymi łodygami palce obracały się bardziej, by sięgnąć pod koronę liści lub wokół łodygi, regulując odległość szczypania do wielkości rośliny. W kolejnych próbach system z powodzeniem chwytał i podnosił wszystkie testowane rośliny bez widocznych uszkodzeń czy poślizgów, nawet gdy korzenie były przesunięte względem środka lub kształty roślin się różniły. Badacze zaprezentowali też pełny proces zbioru: kamera identyfikowała, które sałaty są gotowe, robot je zbierał, przekazywał do stacji przycinania korzeni, a następnie przenosił przycięte główki do punktu zbioru.
Następne kroki w kierunku w pełni zautomatyzowanych zieleni
Badanie pokazuje, że morfujący chwytak z miękkimi końcówkami może zlikwidować przepaść między kruchymi roślinami a sztywnymi maszynami, zapewniając delikatną, a zarazem stabilną obsługę różnych warzyw liściastych w zatłoczonych farmach wewnętrznych. Dla laika wniosek jest prosty: roboty nie muszą już być niezdarne w kontakcie z żywnością — pozwalając swoim „końcówkom palców” zmieniać kształt, mogą wsunąć się w ciasne przestrzenie i tulić każdą roślinę niemal tak ostrożnie jak człowiek. Autorzy zauważają, że potrzebne będą dalsze ulepszenia — takie jak lepszy system wizyjny, automatyczne strojenie kątów palców, lepsze wykrywanie poślizgu oraz rozwiązania uwzględniające sanitarne wymagania — aby osiągnąć prędkości komercyjne. Mimo to praca ta stanowi praktyczny pierwszy krok w kierunku w pełni zautomatyzowanego zbioru, który chroni zarówno plon, jak i jakość sałatek trafiających ostatecznie na twój talerz.
Cytowanie: Liu, J., Chen, X.Y., Nguyen, H.D. et al. A compliant, morphing gripper for handling diverse leafy vegetables in vertical farming systems. Sci Rep 16, 11873 (2026). https://doi.org/10.1038/s41598-026-40087-4
Słowa kluczowe: rolnictwo wertykalne, robotyka miękka, warzywa liściaste, robotyczne zbieranie, automatyzacja rolnictwa