Clear Sky Science · zh
在恶劣天气条件下用于 LiDAR 去噪的空间划分离群点去除方法
在雨雪中清晰可见
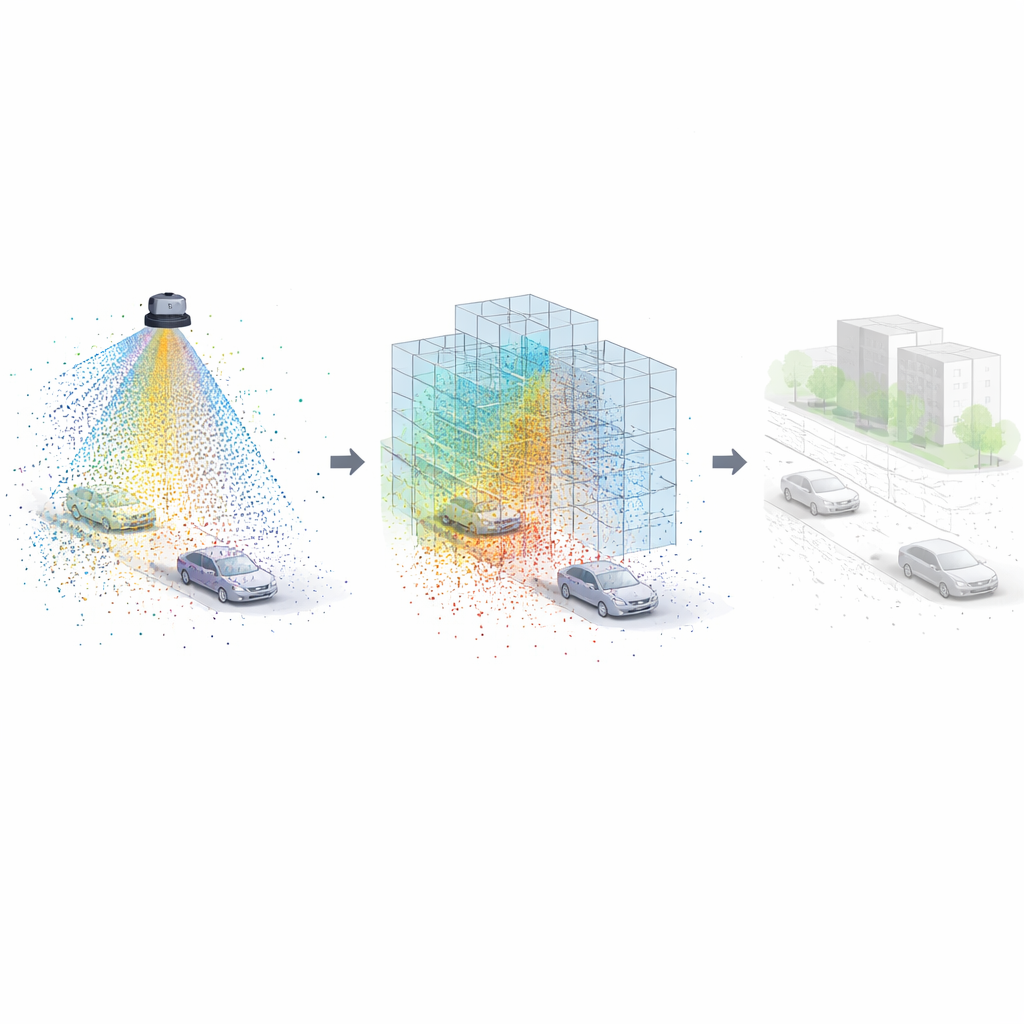
自动驾驶汽车依赖名为 LiDAR 的激光传感器来构建世界的 3D 图像。但当天气变得恶劣——下雪、下雨或起雾时,这些传感器会收到大量来自水滴和雪花的反射,从而用虚假的点淹没视野。本研究提出了一种新的方法,能够快速且准确地清理这些杂乱的 LiDAR 扫描,帮助自动驾驶车辆在恶劣条件下仍能“看见”道路和真实障碍物。
为什么恶劣天气会使激光“失明”
LiDAR 通过发射激光脉冲并测量反射来创建由数百万个 3D 点组成的点云。在晴朗天气下,大多数点来自真实物体,如车辆、建筑和路面。然而在降雪或大雨时,许多点是由空气中漂浮的微小颗粒产生的。传统的清理方法通常基于点之间的距离或反射强度进行筛除。虽然这些方法可以去除部分噪声,但它们常常难以实时跟上,并且在不同距离和视角下点的分布变化时,要么误删过多真实点,要么保留过多虚假点。
将视野划分为可管理的小块
作者提出了空间划分离群点去除(SDOR)方法,首先将 LiDAR 的视野在水平和垂直方向上划分为许多小区域或扇区,从而应对杂波。SDOR 不再将整个场景视为一个大的均质点云,而是把每个扇区当作独立的小场景来处理。在每个扇区内,算法会检查点的数量以及它们的分散程度。这样的划分带来两个主要好处:每个扇区可以在多核处理器上并行处理;方法可以根据该区域的局部条件自适应调整,例如离车辆近或远、点密集或相对稀疏等。
让数据决定什么算噪声
场景被划分后,SDOR 估计每个扇区相对于整体点云的拥挤程度,然后调整搜索半径——即检查每个点周围邻域的范围——以匹配传感器距离和局部密度。靠近车辆或点密集的区域使用较小的邻域;远处或稀疏区域则使用较大的邻域。对于每个点,算法统计落在该半径内的邻居数量。如果邻居过少,该点被视为离群点——很可能是雪花、雨滴或雾的反射——并被移除。这种以密度为感知的策略避免了在所有地方使用单一固定规则,而是让数据决定哪些点值得信任、哪些应被丢弃。
在众多风雨场景中快速且稳定的表现
研究人员在两个具有挑战性的数据集上测试了 SDOR:一个是在真实冬季条件下采集并标注了雪点的数据集,另一个是在城市场景上模拟雪、雨和雾的合成数据集。他们将 SDOR 与八种现有方法进行了比较,包括经典的基于距离的滤波器、依赖回波强度的基于强度的滤波器以及更复杂的动态变体。SDOR 在正确识别天气噪声同时保留真实物体方面始终取得高分,且错误率较低。关键是,得益于其按扇区并行的设计,SDOR 在处理帧速上比其他基于距离的方法更快,并在速度上可与许多基于强度的方法匹敌甚至超越,同时在准确性和帧间稳定性上表现更好。
为更安全的自动驾驶带来更清晰的 3D 视觉
通俗地说,SDOR 教会自动驾驶汽车在不忽视重要事物——如其他车辆、行人和道路本身——的前提下,忽略由恶劣天气产生的视觉“静态”。通过将场景切分并根据每一块的局部条件调整规则,该方法能够快速提供干净且可靠的 3D 视图,足以满足实时驾驶需求。这使得 SDOR 成为在恶劣天气下仍能保持可靠感知的更安全自动驾驶车辆的有前景的构建模块。
引用: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
关键词: LiDAR 去噪, 自动驾驶, 恶劣天气, 点云滤波, 传感器感知