Clear Sky Science · tr
Olumsuz hava koşullarında LiDAR parazit temizliği için mekânsal bölümlenmiş aykırı değer giderimi
Yağmur ve Karın İçinden Net Görmek
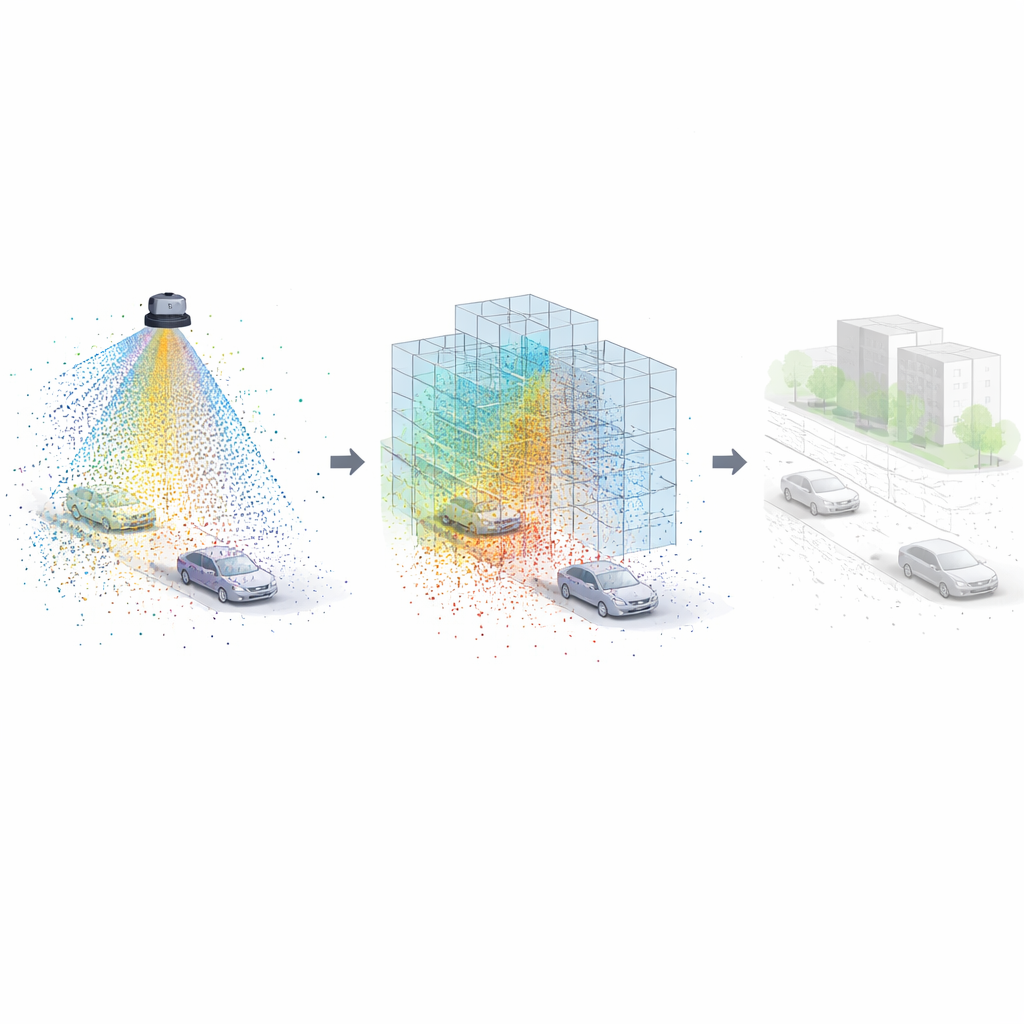
Kendi kendine giden araçlar, dünyayı 3B olarak algılamak için LiDAR adı verilen lazer tabanlı sensörlere dayanır. Ancak hava bozulduğunda—kar, yağmur veya sis—bu sensörler damla ve tanelerden gelen sayısız yansıma algılar; görünümü sahte noktalarla doldurarak karıştırır. Bu çalışma, o dağınık LiDAR taramalarını hızlı ve doğru şekilde temizlemenin yeni bir yolunu sunuyor; böylece otonom araçlar zorlu koşullarda bile yolu ve gerçek engelleri “görebiliyor”.
Neden Kötü Hava Lazer Gözleri Kör Eder
LiDAR, lazer darbeleri gönderip yansımaları ölçerek milyonlarca 3B noktadan oluşan bir bulut oluşturur. Açık havada bu noktaların çoğu araçlar, binalar ve yol yüzeyleri gibi gerçek nesnelerden gelir. Ancak kar veya şiddetli yağmurda birçok nokta havadaki küçük parçacıklardan kaynaklanır. Geleneksel temizleme yöntemleri noktaların birbirine olan uzaklığını veya ne kadar güçlü ışık yansıttıklarını inceler. Bu yaklaşımlar bazı gürültüleri silebilse de genellikle gerçek zamanlı olarak zorlanır ve ya çok fazla gerçek noktayı siler ya da özellikle nokta örüntüsü mesafe ve görüş açısıyla değiştiğinde çok sayıda sahte noktayı bırakır.
Görüşü Yönetilebilir Parçalara Bölmek
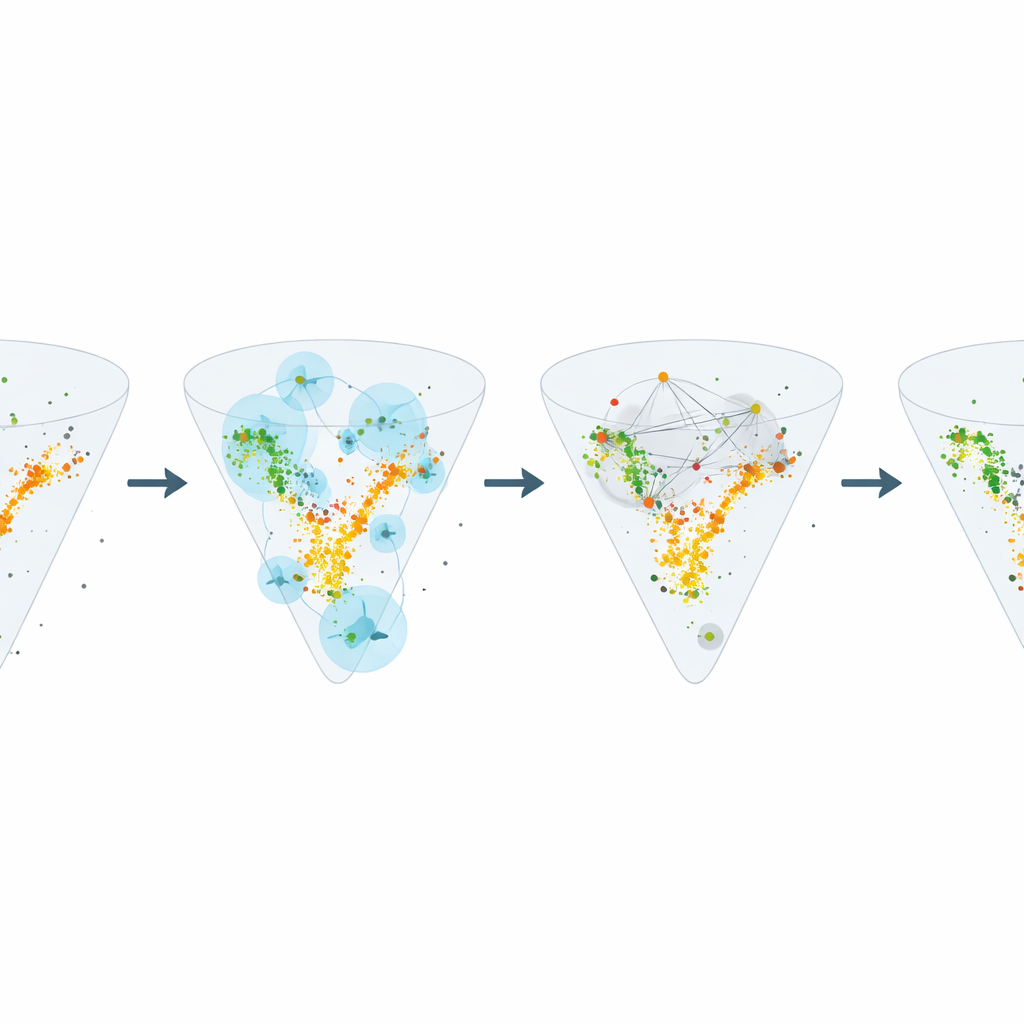
Yazarlar, karmaşayı yatay ve dikey olarak LiDAR’ın görüş alanını birçok küçük bölgeye, yani sektöre bölerek ele alan Mekânsal Bölümlenmiş Aykırı Değer Giderimi (SDOR) yöntemini öneriyor. Tüm sahneyi tek bir büyük, homojen bulut olarak ele almak yerine SDOR her sektörü bağımsız bir mini-sahne olarak işler. Her sektörde algoritma kaç nokta olduğunu ve bu noktaların nasıl dağıldığını inceler. Bu bölünme iki temel avantaj sağlar: her sektör çok çekirdekli işlemcilerde paralel olarak işlenebilir ve yöntem o bölgenin araç yakınlığı, uzaklığı, nokta yoğunluğu veya seyrekliği gibi yerel koşullarına göre davranışını uyarlayabilir.
Gürültüyü Ne Olarak Kabul Edeceğini Veriye Bırakmak
Sahne bölündükten sonra SDOR her sektörün genel buluta göre ne kadar kalabalık olduğunu tahmin eder. Ardından bir arama yarıçapını—her noktanın çevresinde incelenen komşuluk—sensörden uzaklık ve yerel yoğunluğa göre ayarlar. Araç yakınındaki veya yoğun bölgelerdeki noktalar daha küçük komşuluklar alır; uzak veya seyrek bölgeler daha büyük komşuluklar alır. Her nokta için algoritma bu yarıçap içindeki kaç komşu olduğunu sayar. Çok az komşu varsa o nokta aykırı değer—muhtemelen bir kar tanesi, yağmur damlası veya sis yansıması—olarak değerlendirilir ve kaldırılır. Bu yoğunluğa duyarlı strateji, her yerde tek bir sabit kural kullanmaktan kaçınır; bunun yerine hangi noktaların güvenilir olduğu ve hangilerinin atılacağına verinin kendisi karar verir.
Birçok Fırtınalı Sahne İçin Hızlı, Kararlı Performans
Araştırmacılar SDOR’u iki zorlayıcı veri kümesinde test etti: biri etiketlenmiş kar noktalarına sahip gerçek kış koşullarında toplanmış veri, diğeri ise kentsel sürüş sahneleri üzerinde kar, yağmur ve sisi simüle eden veri. SDOR’u klasik mesafeye dayalı filtreler, yansımaların parlaklığına dayanan yoğunluk filtreleri ve daha karmaşık dinamik varyantlar dahil olmak üzere sekiz mevcut yöntemle karşılaştırdılar. SDOR, gerçek nesneleri korurken hava kaynaklı gürültüyü doğru şekilde tanımlamada sürekli olarak yüksek puanlar elde etti ve bazı en düşük hata oranlarından birine ulaştı. Kritik olarak, sektör bazlı paralel tasarımı sayesinde SDOR kareleri diğer mesafe tabanlı yöntemlerden daha hızlı işledi ve hız açısından birçok yoğunluk tabanlı yaklaşıma rakip oldu veya onları geride bıraktı; tüm bunlar yapılırken kareden kareye daha doğru ve daha kararlı kaldı.
Daha Güvenli Otonom Sürüş İçin Daha Net 3B Görüş
Günlük ifadeyle SDOR, kendi kendine giden bir araca kötü havanın neden olduğu görsel “gürültüyü” önemli şeyleri—diğer araçlar, yayalar ve yolun kendisi—kaybetmeden görmeyi öğretir. Sahneyi parçalara ayırıp her parçanın yerel koşullarına göre kurallarını ayarlayarak yöntem, gerçek zamanlı sürüş için yeterince hızlı temiz ve güvenilir 3B görüntüler sunar. Bu da SDOR’u, hava koşulları mükemmel olmadığında bile güvenilir algılama sağlayabilecek daha güvenli otonom araçlar için umut verici bir yapı taşı yapar.
Atıf: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
Anahtar kelimeler: LiDAR gürültü giderme, otonom sürüş, olumsuz hava, nokta bulutu filtreleme, sensör algılama