Clear Sky Science · nl
Ruimtelijk verdeelde uitschieterverwijdering voor LiDAR-ruisonderdrukking bij ongunstige weersomstandigheden
Helder zien door regen en sneeuw
Zelfrijdende auto’s vertrouwen op lasersensoren, LiDAR genoemd, om een 3D-beeld van de omgeving te vormen. Wanneer het weer echter omslaat—sneeuw, regen of mist—vangen deze sensoren talloze reflecties van druppels en vlokken op, waardoor het beeld vervuild raakt met foutieve punten. Deze studie introduceert een nieuwe methode om die rommelige LiDAR-scans snel en nauwkeurig te reinigen, zodat autonome voertuigen de weg en echte obstakels zelfs onder zware omstandigheden beter kunnen ‘zien’.
Waarom slecht weer laserogen verblindt
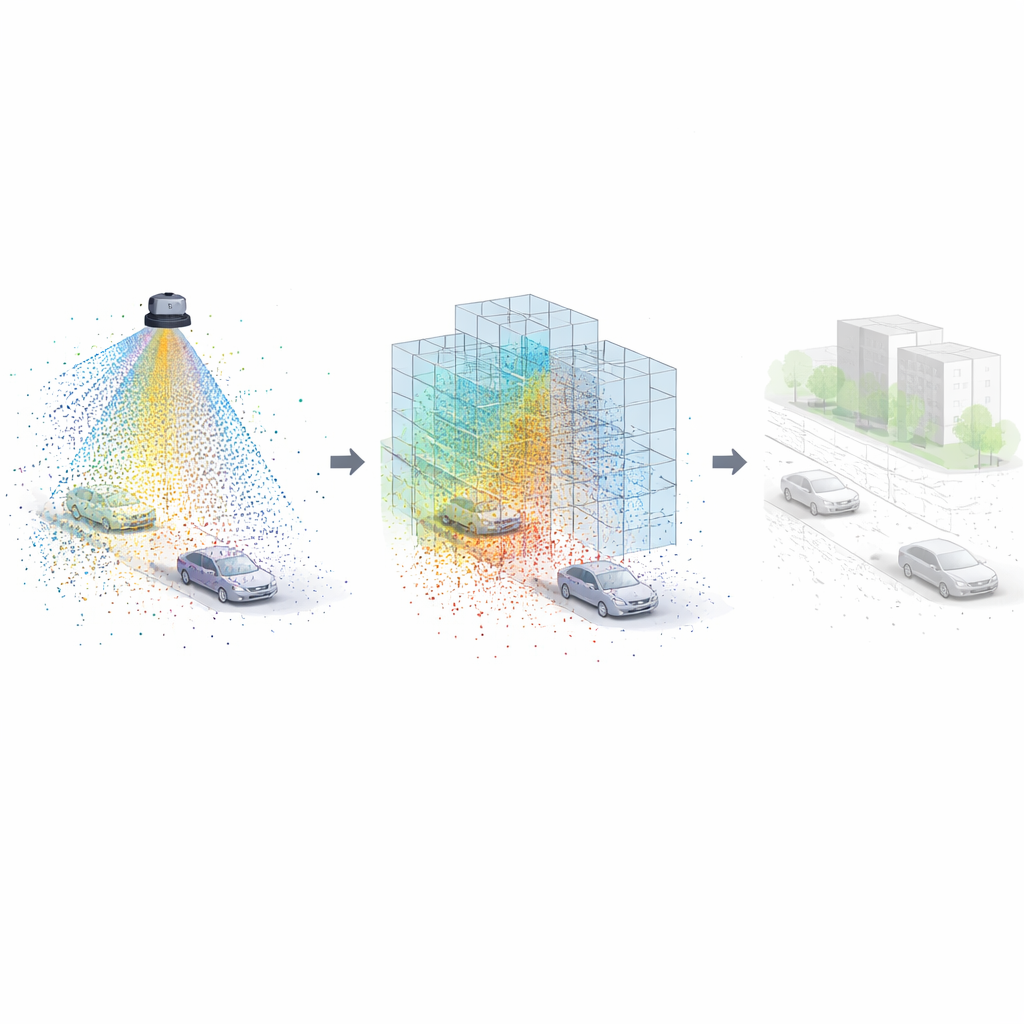
LiDAR werkt door laserpulsen uit te zenden en de reflecties te meten om een wolk van miljoenen 3D-punten te creëren. Bij helder weer komen de meeste punten van echte objecten zoals auto’s, gebouwen en wegoppervlakken. Bij sneeuw of hevige regen worden veel punten echter veroorzaakt door kleine deeltjes in de lucht. Traditionele schoonmaaktechnieken kijken naar afstanden tussen punten of naar hoe sterk ze licht terugkaatsen. Hoewel deze benaderingen wat ruis kunnen verwijderen, hebben ze vaak moeite om in realtime bij te blijven en wissen ze óf te veel echte punten, óf laten ze te veel foutieve punten staan—vooral wanneer het puntpatroon verandert met afstand en kijkhoek.
Het beeld in hanteerbare stukken breken
De auteurs stellen Spatially Divided Outlier Removal (SDOR) voor, een methode die de rommel aanpakt door eerst het gezichtsveld van de LiDAR in veel kleine regio’s, of sectoren, zowel horizontaal als verticaal te verdelen. In plaats van het hele landschap als één grote, uniforme wolk te behandelen, ziet SDOR elke sector als een op zichzelf staande mini-scène. Binnen elke sector kijkt het algoritme naar hoeveel punten aanwezig zijn en hoe verspreid ze liggen. Deze verdeling biedt twee belangrijke voordelen: elke sector kan parallel worden verwerkt op multicore-processors, en de methode kan haar gedrag aanpassen aan lokale omstandigheden in die regio, bijvoorbeeld of deze dicht bij de auto is, ver weg, dichtbevolkt met punten of relatief schaars.
De data laten beslissen wat ruis is
Zodra de scène is verdeeld, schat SDOR in hoe drukbezet elke sector is in vergelijking met de gehele wolk. Vervolgens past het een zoekstraal aan—de buurt rond elk punt die wordt onderzocht—zodat deze overeenkomt met zowel de afstand tot de sensor als de lokale dichtheid. Punten dicht bij de auto of in dichtbevolkte regio’s krijgen kleinere buurten; verre of losse regio’s krijgen grotere. Voor elk punt telt het algoritme hoeveel buren binnen deze straal vallen. Zijn het er te weinig, dan wordt dat punt als uitschieter beschouwd—waarschijnlijk een sneeuwvlok, regendruppel of mistreflectie—en verwijderd. Deze dichtheidsbewuste strategie vermijdt één vaste regel voor overal en laat in plaats daarvan de data bepalen welke punten vertrouwd worden en welke worden weggefilterd.
Snelle, stabiele prestaties in vele stormachtige scènes
De onderzoekers testten SDOR op twee zware datasets: één verzameld in echte winteromstandigheden met gelabelde sneeuwpunten, en een andere die sneeuw, regen en mist simuleert boven stedelijke rijscenario’s. Ze vergeleken SDOR met acht bestaande methoden, waaronder klassieke afstandsgebaseerde filters, intensiteitsgebaseerde filters die vertrouwen op de helderheid van terugkaatsingen, en complexere dynamische varianten. SDOR behaalde consequent hoge scores in het correct identificeren van weersgerelateerde ruis terwijl echte objecten werden behouden, en deed dat met enkele van de laagste foutpercentages. Cruciaal is dat SDOR dankzij het sectorgewijze, parallelle ontwerp frames sneller verwerkte dan andere afstandsgebaseerde methoden en zelfs concurreerde met of sneller was dan veel intensiteitsgebaseerde benaderingen qua snelheid, terwijl het nauwkeuriger en stabieler bleef van frame tot frame.
Duidelijker 3D-visie voor veiliger autonoom rijden
In gewone bewoordingen leert SDOR een zelfrijdende auto de visuele ‘ruis’ veroorzaakt door slecht weer te negeren zonder het zicht op belangrijke zaken—andere voertuigen, voetgangers en de weg zelf—te verliezen. Door de scène in stukken te knippen en de regels aan te passen aan de lokale omstandigheden van elk stuk, levert de methode schone, betrouwbare 3D-weergaven snel genoeg voor realtime rijden. Dit maakt SDOR tot een veelbelovend bouwblok voor veiligere autonome voertuigen die betrouwbare waarneming kunnen behouden, zelfs wanneer het weer verre van perfect is.
Bronvermelding: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
Trefwoorden: LiDAR-ruisonderdrukking, autonoom rijden, onjuiste weersomstandigheden, puntwolkfiltering, sensorwaarneming