Clear Sky Science · en
Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions
Seeing Clearly Through Rain and Snow
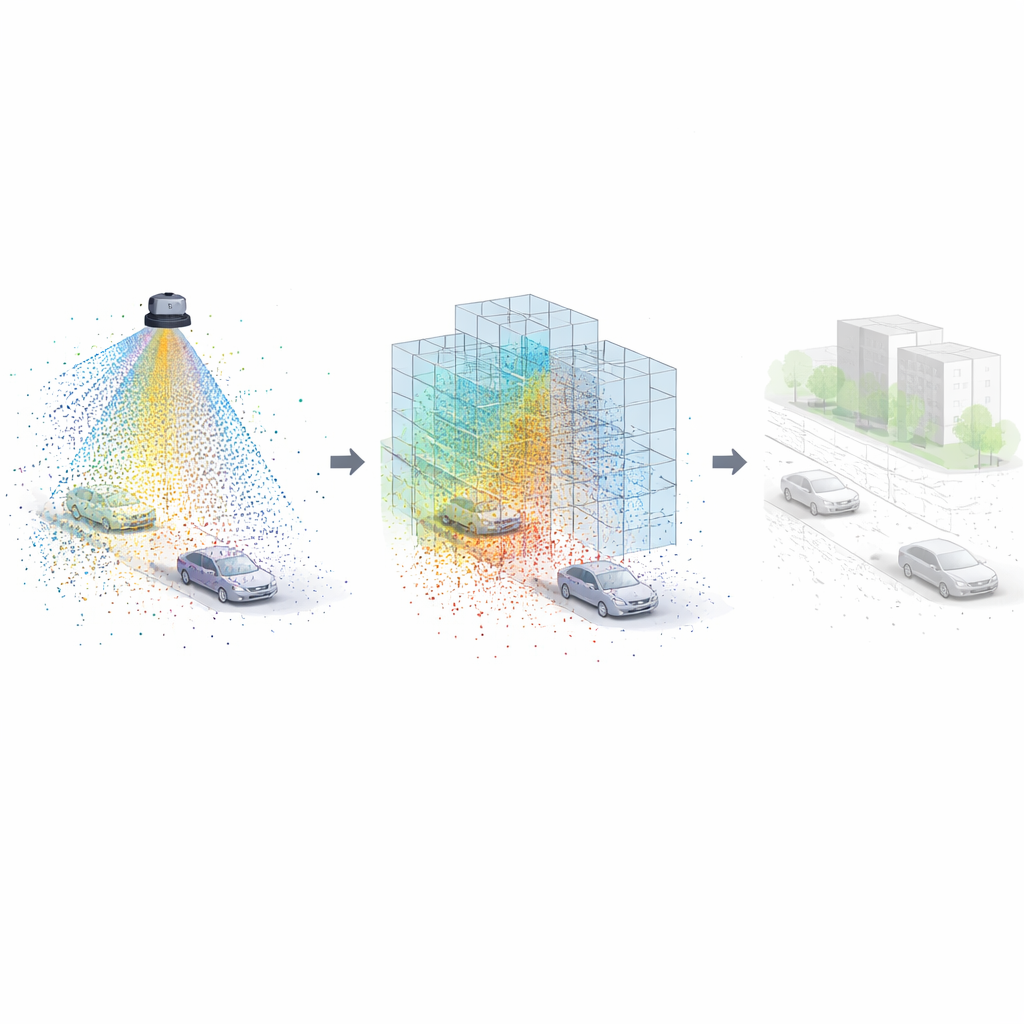
Self-driving cars rely on laser-based sensors, called LiDAR, to build a 3D picture of the world. But when the weather turns nasty—snow, rain, or fog—these sensors pick up countless reflections from droplets and flakes, cluttering the view with false points. This study introduces a new way to clean up those messy LiDAR scans quickly and accurately, helping autonomous vehicles “see” the road and real obstacles even in harsh conditions.
Why Bad Weather Blinds Laser Eyes
LiDAR works by sending out laser pulses and measuring the reflections to create a cloud of millions of 3D points. In clear weather, most of those points come from real objects like cars, buildings, and road surfaces. In snow or heavy rain, however, many points are caused by tiny particles floating in the air. Traditional cleanup methods look at how far points are from one another or how strongly they reflect light. While these approaches can remove some noise, they often struggle to keep up in real time and either erase too many real points or leave too many false ones, especially when the pattern of points changes with distance and viewing angle.
Breaking the View Into Manageable Pieces
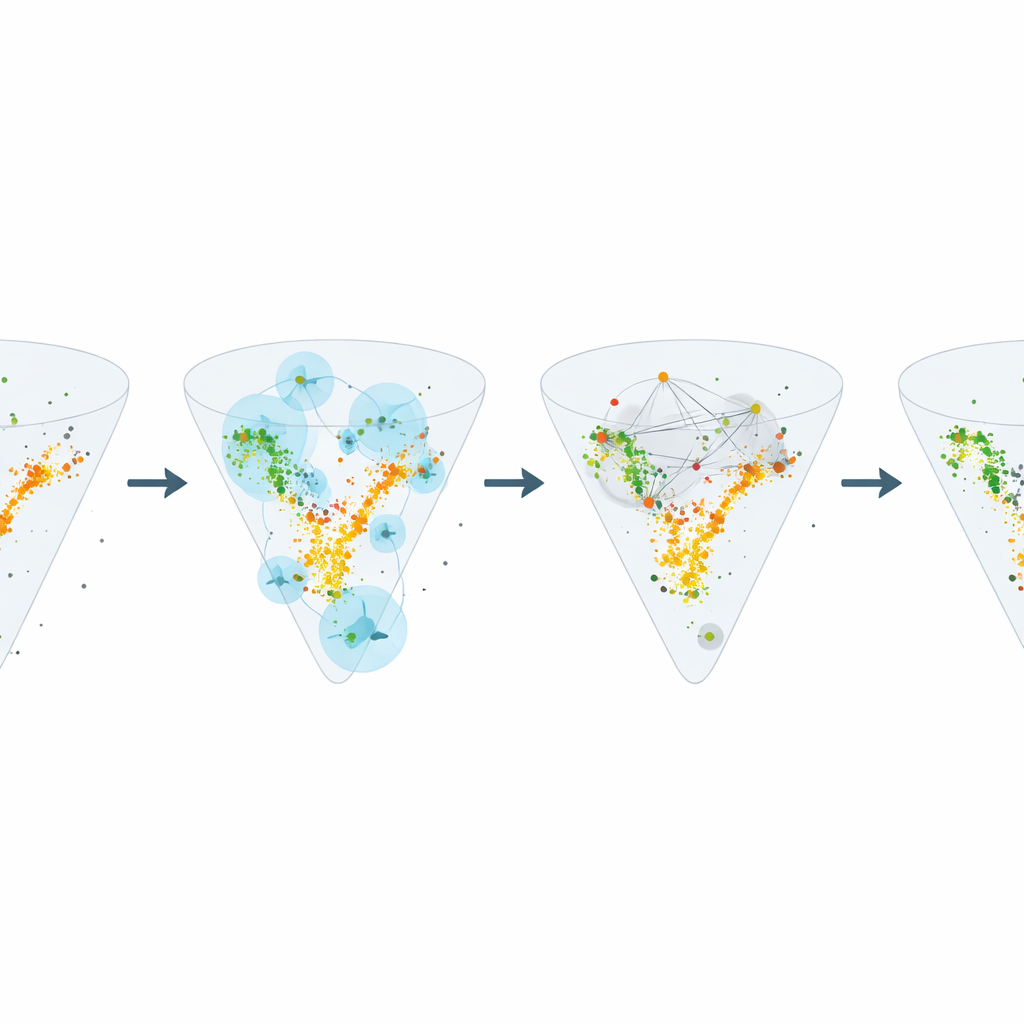
The authors propose Spatially Divided Outlier Removal (SDOR), a method that tackles the clutter by first dividing the LiDAR’s field of view into many small regions, or sectors, both horizontally and vertically. Instead of treating the entire scene as one big, uniform cloud, SDOR treats each sector as an independent mini-scene. Within each sector, the algorithm looks at how many points are present and how spread out they are. This division unlocks two key benefits: each sector can be processed in parallel on multi-core processors, and the method can adapt its behavior to the local conditions of that region, such as whether it is close to the car, far away, dense with points, or relatively sparse.
Letting the Data Decide What Counts as Noise
Once the scene is divided, SDOR estimates how crowded each sector is compared with the overall cloud. It then adjusts a search radius—the neighborhood around each point that is inspected—to match both distance from the sensor and local density. Points near the car or in densely packed regions get smaller neighborhoods; distant or sparse regions get larger ones. For every point, the algorithm counts how many neighbors fall within this radius. If there are too few, that point is treated as an outlier—likely a snowflake, raindrop, or fog reflection—and removed. This density-aware strategy avoids using one fixed rule everywhere and instead lets the data shape which points are trusted and which are thrown away.
Fast, Stable Performance Across Many Stormy Scenes
The researchers tested SDOR on two demanding datasets: one collected in real winter conditions with labeled snow points, and another that simulates snow, rain, and fog over urban driving scenes. They compared SDOR with eight existing methods, including classic distance-based filters, intensity-based filters that rely on brightness of returns, and more complex dynamic variants. SDOR consistently achieved high scores in correctly identifying weather noise while preserving real objects, and did so with some of the lowest error rates. Crucially, thanks to its sector-wise, parallel design, SDOR processed frames faster than other distance-based methods and even rivaled or beat many intensity-based approaches on speed, all while remaining more accurate and more stable from frame to frame.
Clearer 3D Vision for Safer Autonomous Driving
In everyday terms, SDOR teaches a self-driving car to ignore the visual “static” caused by bad weather without losing sight of the important things—other vehicles, pedestrians, and the road itself. By cutting the scene into pieces and adjusting its rules to each piece’s local conditions, the method delivers clean, reliable 3D views quickly enough for real-time driving. This makes SDOR a promising building block for safer autonomous vehicles that can maintain dependable perception even when the weather is far from perfect.
Citation: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
Keywords: LiDAR denoising, autonomous driving, adverse weather, point cloud filtering, sensor perception