Clear Sky Science · de
Räumlich geteilte Ausreißerentfernung zur LiDAR-Rauschunterdrückung bei widrigen Wetterbedingungen
Bei Regen und Schnee klar sehen
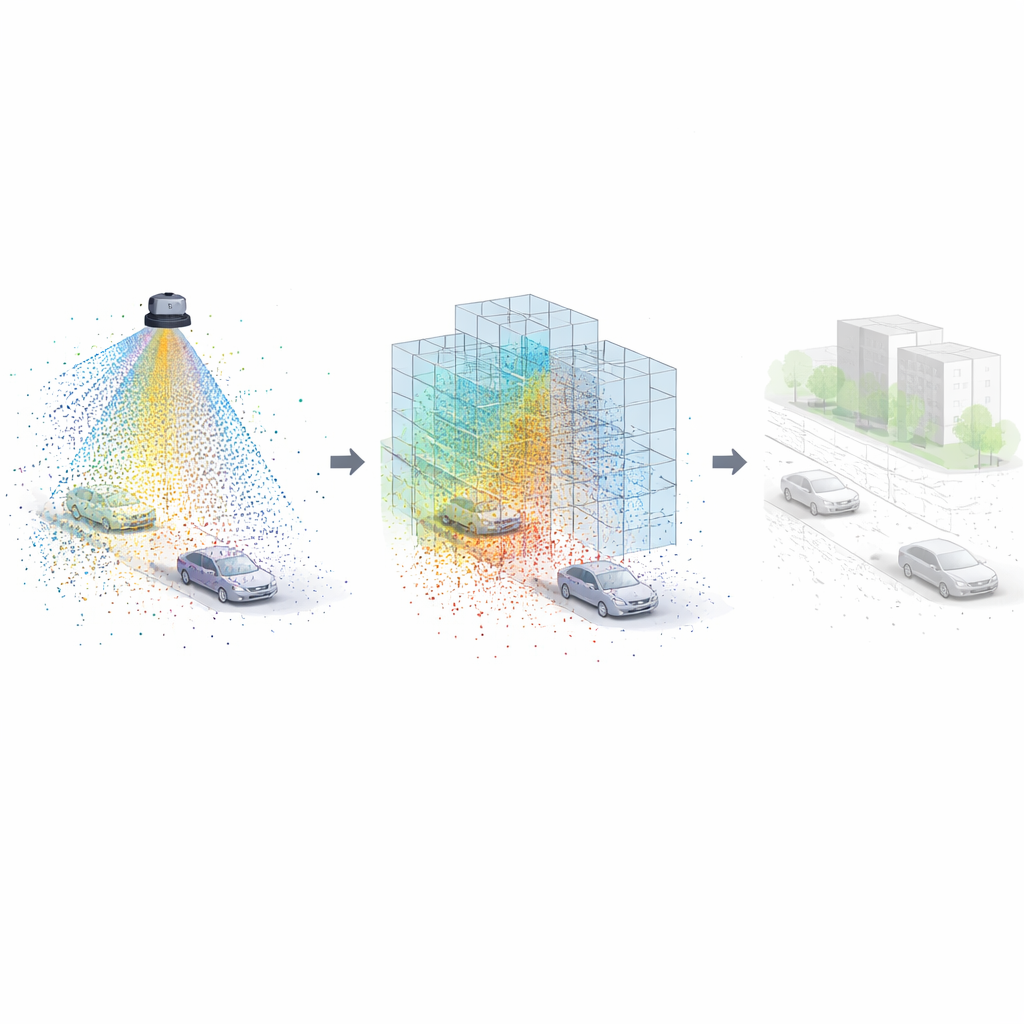
Autonome Fahrzeuge verlassen sich auf laserbasierte Sensoren, sogenannte LiDAR, um ein 3D-Bild der Umgebung zu erstellen. Wenn das Wetter jedoch schlecht wird – Schnee, Regen oder Nebel – erfassen diese Sensoren zahllose Reflexionen von Tropfen und Flocken, die die Szene mit falschen Punkten überlagern. Diese Studie stellt eine neue Methode vor, um solche unordentlichen LiDAR-Scans schnell und präzise zu bereinigen, sodass autonome Fahrzeuge die Fahrbahn und echte Hindernisse auch unter harten Bedingungen besser „sehen“ können.
Warum schlechtes Wetter die Laseraugen blendet
LiDAR arbeitet, indem Laserimpulse ausgesendet und die Reflexionen gemessen werden, um eine Wolke aus Millionen 3D-Punkten zu erzeugen. Bei klarem Wetter stammen die meisten dieser Punkte von realen Objekten wie Autos, Gebäuden oder Straßendecken. Bei Schnee oder starkem Regen hingegen werden viele Punkte durch winzige Partikel in der Luft verursacht. Traditionelle Bereinigungsmethoden betrachten, wie weit Punkte voneinander entfernt sind oder wie stark sie Licht reflektieren. Diese Ansätze können zwar einiges Rauschen entfernen, haben aber häufig Probleme, in Echtzeit Schritt zu halten, und löschen entweder zu viele reale Punkte oder lassen zu viele falsche stehen – besonders wenn sich das Punktmuster mit Entfernung und Blickwinkel verändert.
Die Sicht in handhabbare Stücke zerlegen
Die Autoren schlagen die Spatially Divided Outlier Removal (SDOR) vor, eine Methode, die das Durcheinander angeht, indem sie das Sichtfeld des LiDAR zuerst in viele kleine Bereiche oder Sektoren sowohl horizontal als auch vertikal unterteilt. Anstatt die gesamte Szene als eine große, einheitliche Wolke zu behandeln, sieht SDOR jeden Sektor als eigene Mini-Szene an. Innerhalb jedes Sektors untersucht der Algorithmus, wie viele Punkte vorhanden sind und wie stark sie verteilt sind. Diese Aufteilung bietet zwei wesentliche Vorteile: Jeder Sektor kann parallel auf Mehrkernprozessoren bearbeitet werden, und die Methode kann ihr Verhalten an die lokalen Bedingungen in diesem Bereich anpassen, etwa ob er nahe am Fahrzeug, weit entfernt, punktedicht oder eher spärlich ist.
Die Daten entscheiden lassen, was als Rauschen gilt
Nachdem die Szene unterteilt ist, schätzt SDOR, wie dicht besetzt jeder Sektor im Vergleich zur Gesamtwolke ist. Anschließend passt es einen Suchradius – die Nachbarschaft um jeden Punkt, die untersucht wird – so an, dass sowohl die Entfernung zum Sensor als auch die lokale Dichte berücksichtigt werden. Punkte nahe am Fahrzeug oder in dicht gepackten Bereichen erhalten kleinere Nachbarschaften; entfernte oder spärliche Regionen größere. Für jeden Punkt zählt der Algorithmus, wie viele Nachbarn innerhalb dieses Radius liegen. Gibt es zu wenige, wird der Punkt als Ausreißer behandelt – wahrscheinlich eine Schneeflocke, ein Regentropfen oder eine Nebelreflexion – und entfernt. Diese dichteabhängige Strategie vermeidet eine überall gleiche Regel und lässt stattdessen die Daten bestimmen, welche Punkte vertrauenswürdig sind und welche verworfen werden.
Schnelle, stabile Leistung in vielen stürmischen Szenen
Die Forschenden testeten SDOR auf zwei anspruchsvollen Datensätzen: einem, das unter realen Wintersbedingungen mit gekennzeichneten Schneepunkten aufgenommen wurde, und einem anderen, das Schnee, Regen und Nebel über städtische Fahrszenen simuliert. Sie verglichen SDOR mit acht existierenden Methoden, darunter klassische distanzbasierte Filter, intensitätsbasierte Filter, die auf der Helligkeit der Rückkehrsignale beruhen, und komplexere dynamische Varianten. SDOR erreichte durchweg hohe Werte bei der korrekten Identifikation von Wettermüll, während reale Objekte erhalten blieben, und wies einige der geringsten Fehlerraten auf. Entscheidender Vorteil ist, dass SDOR dank seines sektorenweisen, parallelen Designs Frames schneller verarbeitete als andere distanzbasierte Methoden und in puncto Geschwindigkeit viele intensitätsbasierte Ansätze einholte oder übertraf – und das bei besserer Genauigkeit und größerer Stabilität von Frame zu Frame.
Deutlichere 3D-Sicht für sichereres autonomes Fahren
Alltagssprachlich bringt SDOR einem selbstfahrenden Auto bei, das visuelle „Rauschen“, das schlechtes Wetter verursacht, zu ignorieren, ohne den Blick für Wesentliches zu verlieren – andere Fahrzeuge, Fußgänger und die Fahrbahn selbst. Indem die Szene in Teile zerlegt und die Regeln an die lokalen Bedingungen jedes Abschnitts angepasst werden, liefert die Methode saubere, verlässliche 3D-Ansichten schnell genug für das Echtzeitfahren. Das macht SDOR zu einem vielversprechenden Baustein für sicherere autonome Fahrzeuge, die auch bei widrigem Wetter eine verlässliche Wahrnehmung behalten können.
Zitation: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
Schlüsselwörter: LiDAR-Rauschunterdrückung, autonomes Fahren, widrige Wetterbedingungen, Punktwolkenfilterung, Sensorwahrnehmung