Clear Sky Science · sv
Rumsligt uppdelad uteliggareborttagning för LiDAR-bullerreduktion i ogynnsamma väderförhållanden
Se klart genom regn och snö
Självkörande bilar förlitar sig på laserbaserade sensorer, kallade LiDAR, för att bygga en 3D-bild av omgivningen. Men när vädret blir besvärligt—snö, regn eller dimma—får dessa sensorer otaliga reflektioner från droppar och flingor, vilket skräpar ner bilden med falska punkter. Denna studie presenterar ett nytt sätt att snabbt och noggrant rengöra sådana röriga LiDAR-skanningar, vilket hjälper autonoma fordon att ”se” vägen och verkliga hinder även i hårda förhållanden.
Varför dåligt väder bländar laserögon
LiDAR fungerar genom att sända ut laserpulser och mäta reflektionerna för att skapa ett moln av miljontals 3D-punkter. I klart väder kommer de flesta av dessa punkter från verkliga objekt som bilar, byggnader och vägytor. I snö eller kraftigt regn orsakas däremot många punkter av små partiklar som svävar i luften. Traditionella rengöringsmetoder ser på hur långt punkter ligger från varandra eller hur starkt de reflekterar ljus. Även om dessa tillvägagångssätt kan ta bort en del brus, har de ofta svårt att hänga med i realtid och raderar antingen för många verkliga punkter eller lämnar kvar för många falska, särskilt när punktmönstret förändras med avstånd och synvinkel.
Dela upp vyn i hanterbara delar
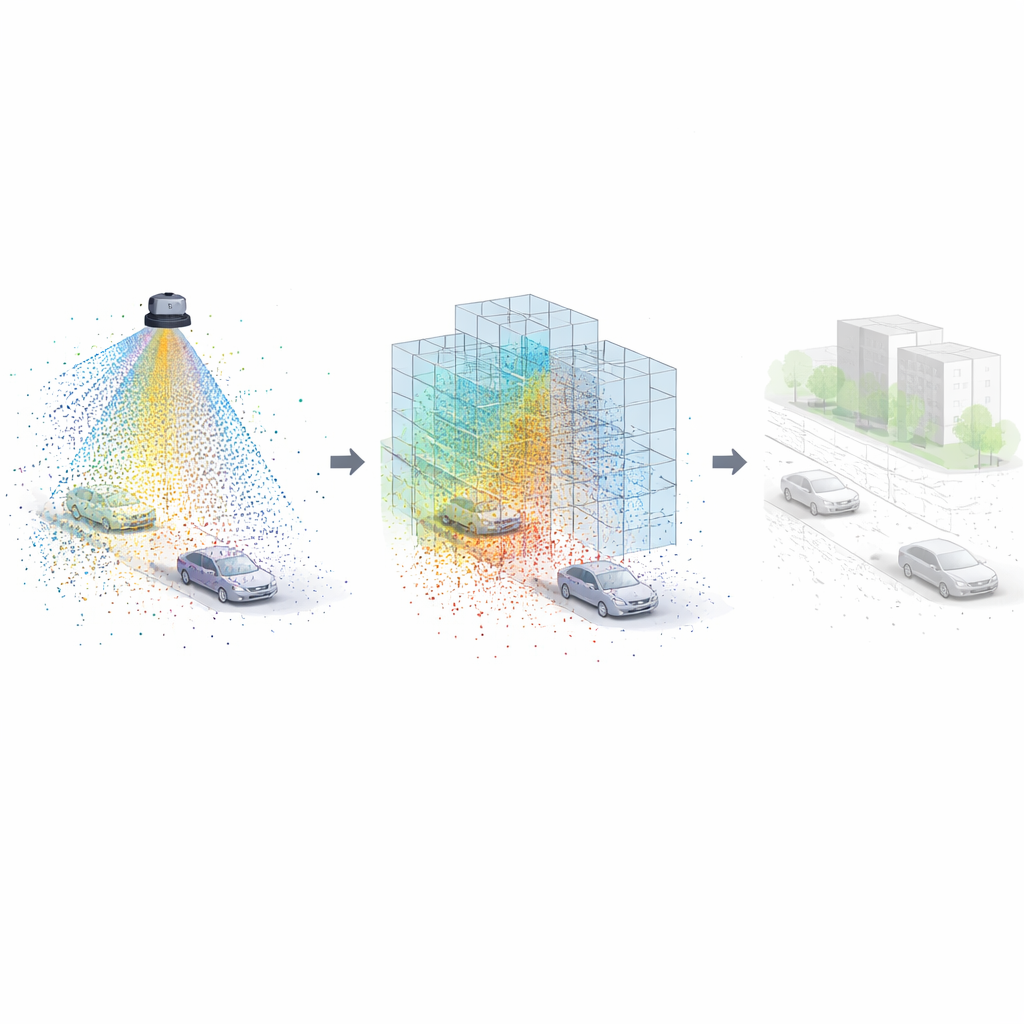
Författarna föreslår Spatially Divided Outlier Removal (SDOR), en metod som hanterar röran genom att först dela LiDAR:ens synfält i många små regioner, eller sektorer, både horisontellt och vertikalt. Istället för att behandla hela scenen som ett enda stort, enhetligt moln, behandlar SDOR varje sektor som en fristående mini-scen. Inom varje sektor undersöker algoritmen hur många punkter som finns och hur utspridda de är. Denna uppdelning ger två viktiga fördelar: varje sektor kan bearbetas parallellt på flerkärniga processorer, och metoden kan anpassa sitt beteende till de lokala förhållandena i den regionen, till exempel om den ligger nära bilen, långt bort, är tät med punkter eller relativt glest.
Låta datan avgöra vad som räknas som brus
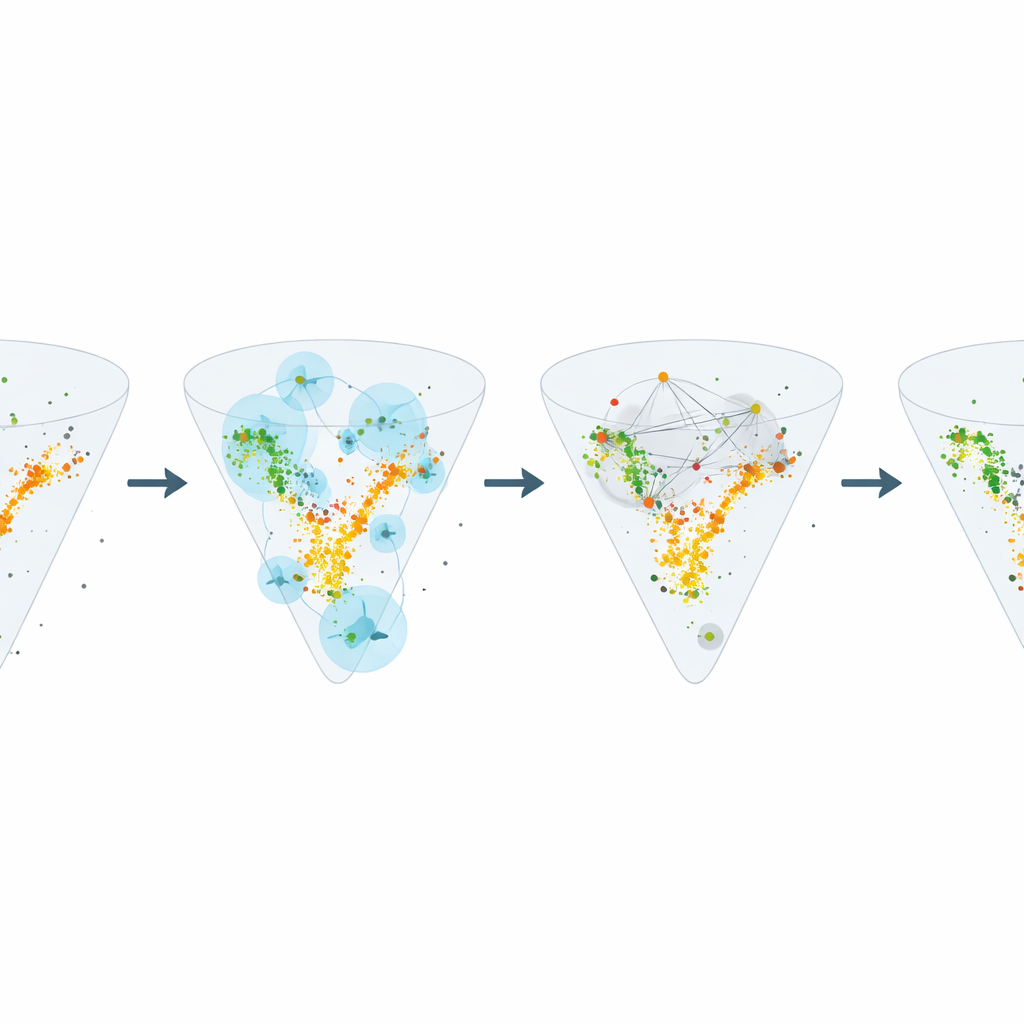
När scenen är uppdelad uppskattar SDOR hur trång varje sektor är jämfört med hela molnet. Därefter justerar den en sökrank—grannskapet runt varje punkt som inspekteras—så att det motsvarar både avståndet från sensorn och lokal densitet. Punkter nära bilen eller i tätt packade regioner får mindre grannskap; avlägsna eller glesa regioner får större. För varje punkt räknar algoritmen hur många grannar som faller inom denna radie. Om det finns för få behandlas den punkten som en uteliggare—sannolikt en snöflinga, regndroppe eller dimreflektion—och tas bort. Denna densitetsmedvetna strategi undviker en enda fast regel överallt och låter istället datan forma vilka punkter som kan litas på och vilka som kastas bort.
Snabb, stabil prestanda över många stormiga scener
Forskarna testade SDOR på två krävande dataset: ett insamlat i verkliga vinterförhållanden med märkta snöpunkter, och ett annat som simulerar snö, regn och dimma över urbana körscener. De jämförde SDOR med åtta befintliga metoder, inklusive klassiska avståndsbaserade filter, intensitetsbaserade filter som förlitar sig på returers ljusstyrka, och mer komplexa dynamiska varianter. SDOR nådde konsekvent höga poäng i att korrekt identifiera väderbrus samtidigt som verkliga objekt bevarades, och gjorde det med några av de lägsta felnivåerna. Avgörande är att tack vare sin sektorsvisa, parallella design bearbetade SDOR ramar snabbare än andra avståndsbaserade metoder och till och med matchade eller slog många intensitetsbaserade tillvägagångssätt i hastighet, samtidigt som den förblev mer exakt och stabilare från bildruta till bildruta.
Klarare 3D-syn för säkrare autonom körning
I vardagstermer lär SDOR en självkörande bil att ignorera det visuella ”bruset” som orsakas av dåligt väder utan att tappa sikte på det viktiga—andra fordon, fotgängare och själva vägen. Genom att dela upp scenen i delar och anpassa sina regler till varje dels lokala förhållanden levererar metoden rena, tillförlitliga 3D-vyer tillräckligt snabbt för verklig körning. Det gör SDOR till en lovande byggsten för säkrare autonoma fordon som kan bibehålla pålitlig perception även när vädret är långt från perfekt.
Citering: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
Nyckelord: LiDAR-bullerreduktion, självkörande fordon, ogynnsamt väder, punktmolnsfiltrering, sensormedvetande