Clear Sky Science · he
הסרת חריגים מחולקת מרחבית לניקוי רעש LiDAR בתנאי מזג אוויר קשים
לראות בבירור דרך גשם ושלג
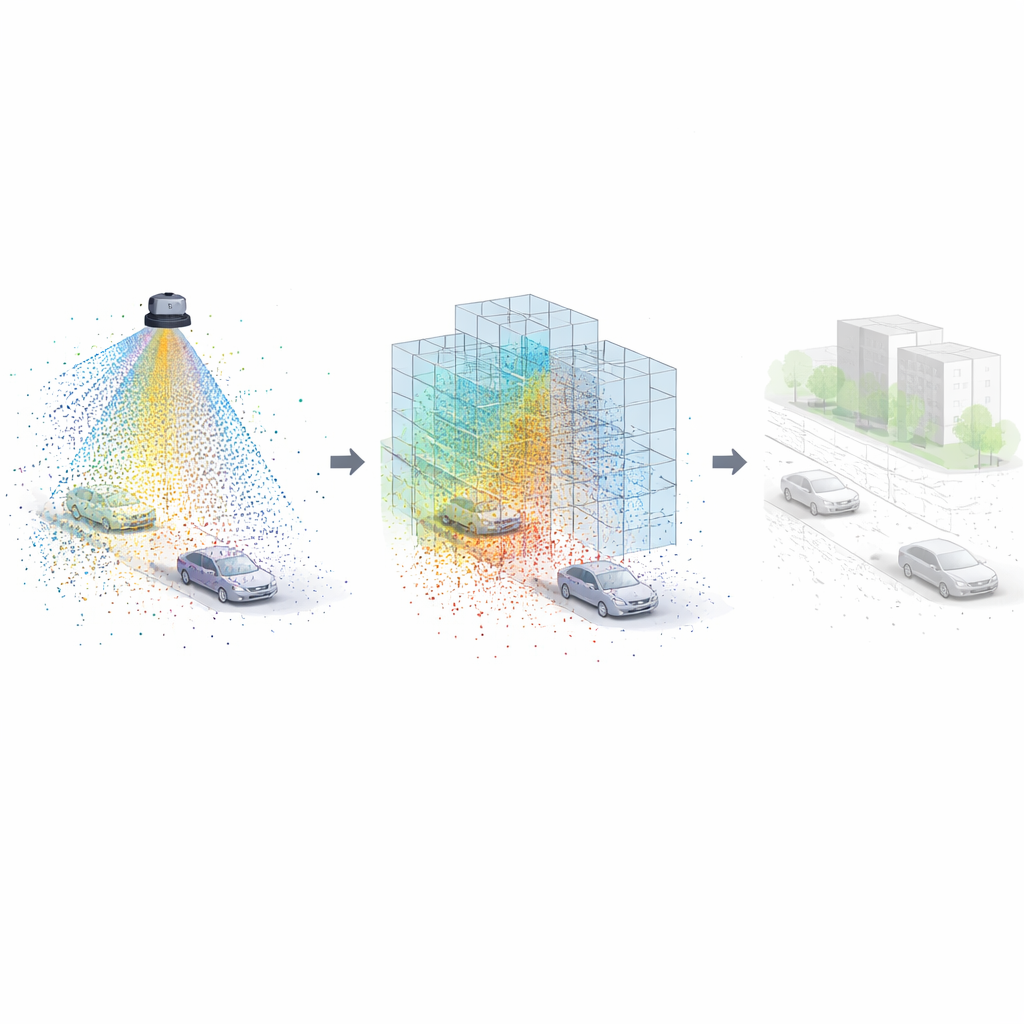
מכוניות אוטונומיות מסתמכות על חיישנים מבוססי לייזר, שנקראים LiDAR, כדי ליצור תמונה תלת־ממדית של הסביבה. אך כאשר מזג האוויר נהיה סוער—שלג, גשם או ערפל—החיישנים קולטים שפע החזרים מטיפות ופתיתים, ומלכלכים את התצוגה עם נקודות שווא. המחקר הזה מציג שיטה חדשה לנקות במהירות ובדייקנות סריקות LiDAR מסורבלות כאלה, ולסייע לכלי רכב אוטונומיים "לראות" את הדרך והמכשולים האמיתיים גם בתנאים קשים.
מדוע מזג אוויר גרוע עיוור עיניים לייזריות
LiDAR פועל על ידי שליחת פולסים לייזריים ומדידת ההחזרים ליצירת ענן של מיליוני נקודות תלת־ממדיות. במזג אוויר בהיר, רוב הנקודות מגיעות מאובייקטים אמיתיים כמו כלי רכב, מבנים ומשטחי דרך. בשלג או גשם כבד, לעומת זאת, רבות מהנקודות נוצרות על ידי חלקיקים זעירים הצפים באוויר. שיטות ניקוי מסורתיות בוחנות עד כמה הנקודות קרובות זו לזו או עד כמה הן מחזירות אור בחוזקה. בעוד שגישות אלה יכולות להסיר חלק מהרעש, לעיתים הן מתקשות לעמוד בקצב בזמן אמת ולפעמים מוחקות יותר מדי נקודות אמיתיות או משאירות יותר מדי נקודות שווא, במיוחד כאשר דפוס הנקודות משתנה עם מרחק וזווית הצפייה.
לפצח את המבט לחלקים מנוהלים
המחברים מציעים שיטה הנקראת הסרת חריגים מחולקת מרחבית (SDOR), שנלחמת בבלגאן על ידי חלוקת שדה הראייה של ה‑LiDAR לאזורים קטנים רבים, או מגזרים, גם במאוזן וגם במאונך. במקום להתייחס לכל הסצנה כענן אחד גדול ואחיד, SDOR מתייחסת לכל מגזר כסצנה מיני עצמאית. בתוך כל מגזר האלגוריתם בוחן כמה נקודות נמצאות וכמה הן מפוזרות. חלוקה זו פותחת שתי יתרונות מרכזיים: כל מגזר ניתן לעיבוד במקביל על מעבדים רב־ליבתיים, והשיטה יכולה להתאים את התנהגותה לתנאים המקומיים של אותו אזור, כגון קרבה לרכב, מרחק, צפיפות נקודות או נדירות יחסית.
להניח לנתונים להחליט מה נחשב לרעש
לאחר שהסצנה מחולקת, SDOR מעריכה עד כמה כל מגזר צפוף בהשוואה לענן הכולל. היא מתאימה רדיוס חיפוש—הסביבה סביב כל נקודה שנבדקת—כך שיתאים הן למרחק מהחיישן והן לצפיפות המקומית. נקודות קרובות לרכב או באזורים צפופים מקבלות שכנות קטנות יותר; אזורים מרוחקים או דלילים מקבלים שכנות גדולות יותר. עבור כל נקודה האלגוריתם סופר כמה שכנים נמצאים בתוך רדיוס זה. אם יש מעט מדי שכנים, הנקודה מתויגת כחריגה—ככל הנראה פתית שלג, טיפה של גשם או ההחזר של ערפל—ונמחקת. אסטרטגיית המודעות לצפיפות הזו נמנעת מחוק אחד קבוע לכל מקום ומאפשרת לנתונים לעצב אילו נקודות מהימנות ואילו מושלכות.
ביצועים מהירים ויציבים במספר רב של סצנות סוערות
החוקרים בחנו את SDOR על שני מערכי נתונים תובעניים: אחד נאסף בתנאי חורף אמיתיים עם נקודות שלג מתוייגות, ואחר המדמה שלג, גשם וערפל על סצנות נהיגה עירוניות. הם השוו את SDOR עם שמונה שיטות קיימות, כולל מסננים קלאסיים מבוססי מרחק, מסננים מבוססי עוצמת החזרה התלויים בבהירות ההחזר, וגרסאות דינמיות מורכבות יותר. SDOR השיגה בעקביות ציונים גבוהים בזיהוי נכון של רעש מזג האוויר תוך שמירה על אובייקטים אמיתיים, ועשתה זאת עם חלק משיעורי השגיאה הנמוכים ביותר. חשוב מכך, הודות לעיצוב המגזרי וליכולת העיבוד המקבילית, SDOR עיבדה פריימים מהר יותר משיטות מבוססות מרחק אחרות ואפילו התחרתה או עברו רבות מהשיטות המבוססות עוצמה במהירות, כל זאת תוך שמירה על דיוק ויציבות טובים יותר מפריים לפריים.
ראייה תלת־ממדית בהירה יותר לבטיחות הנהיגה האוטונומית
באופן יומיומי, SDOR מלמדת רכב אוטונומי להתעלם מה"סטטיקה" הוויזואלית שנגרמת על ידי מזג אוויר גרוע מבלי לאבד את המבט על הדברים החשובים—רכבים אחרים, הולכי רגל והדרך עצמה. על ידי חלוקת הסצנה לחתיכות והתאמת הכללים לתנאים המקומיים של כל חתיכה, השיטה מספקת מבטים תלת־ממדיים נקיים ואמינים במהירות מספקת לנהיגה בזמן אמת. זה הופך את SDOR לבניין מבטיח למערכות נהיגה אוטונומית בטוחות יותר היכולות לשמור על תפיסה מהימנה גם כאשר מזג האוויר רחוק מלהיות מושלם.
ציטוט: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
מילות מפתח: ניקוי רעש LiDAR, נהיגה אוטונומית, מזג אוויר קשה, סינון ענני נקודות, תפיסת חישה חיישנית