Clear Sky Science · fr
Suppression d’anomalies spatialement divisée pour le débruitage LiDAR en conditions météorologiques difficiles
Voir clairement à travers la pluie et la neige
Les voitures autonomes s’appuient sur des capteurs laser, appelés LiDAR, pour construire une image 3D du monde. Mais lorsque la météo se déchaîne — neige, pluie ou brouillard — ces capteurs enregistrent d’innombrables réflexions sur les gouttes et flocons, encombrant la vue de points faux. Cette étude présente une nouvelle méthode pour nettoyer rapidement et précisément ces balayages LiDAR encombrés, aidant les véhicules autonomes à « voir » la route et les obstacles réels même dans des conditions difficiles.
Pourquoi le mauvais temps aveugle les yeux laser
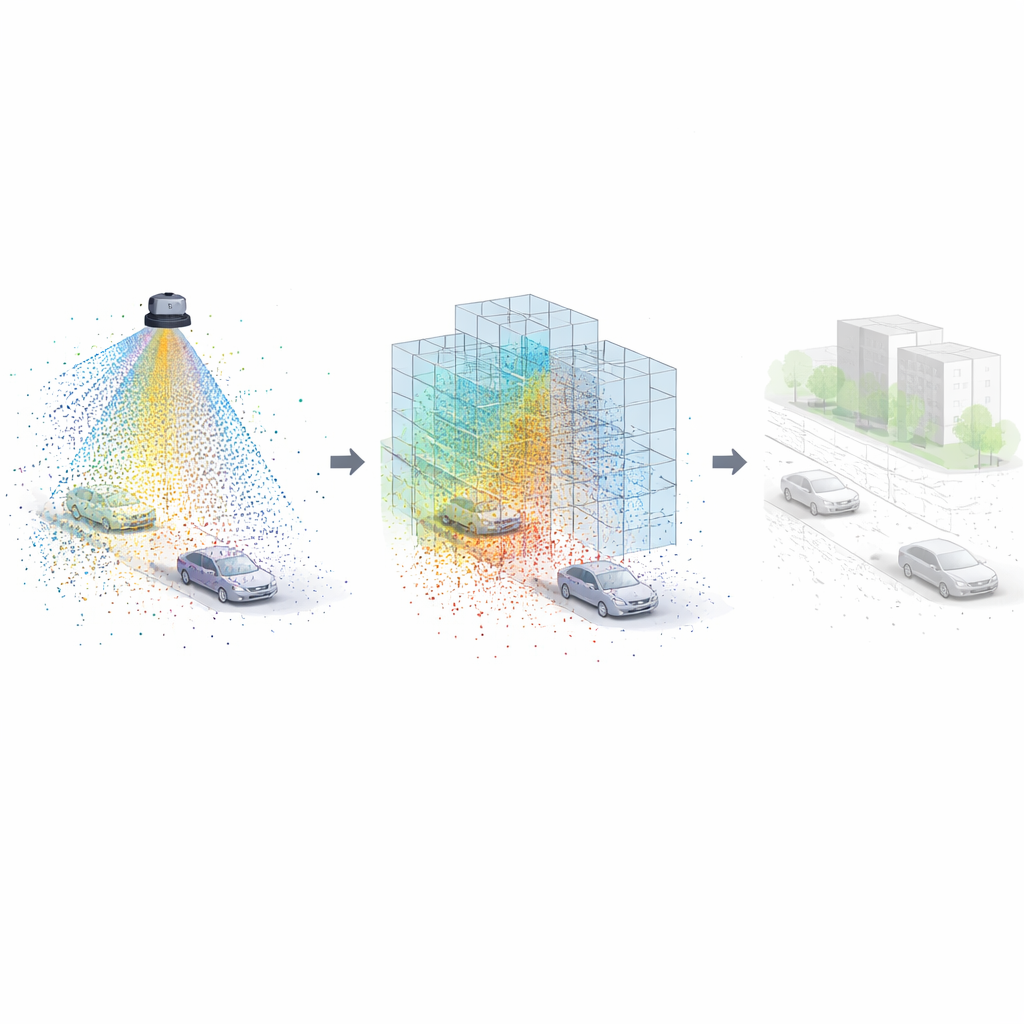
Le LiDAR fonctionne en émettant des impulsions laser et en mesurant les réflexions pour créer un nuage de millions de points 3D. Par temps clair, la plupart de ces points proviennent d’objets réels comme des voitures, des bâtiments ou la chaussée. En cas de neige ou de forte pluie, toutefois, de nombreux points sont causés par de petites particules en suspension dans l’air. Les méthodes de nettoyage traditionnelles examinent les distances entre points ou l’intensité des retours lumineux. Bien que ces approches puissent éliminer une partie du bruit, elles peinent souvent à suivre en temps réel et suppriment soit trop de points réels, soit laissent trop de points faux, surtout lorsque la configuration des points varie selon la distance et l’angle de vue.
Découper la vue en morceaux gérables
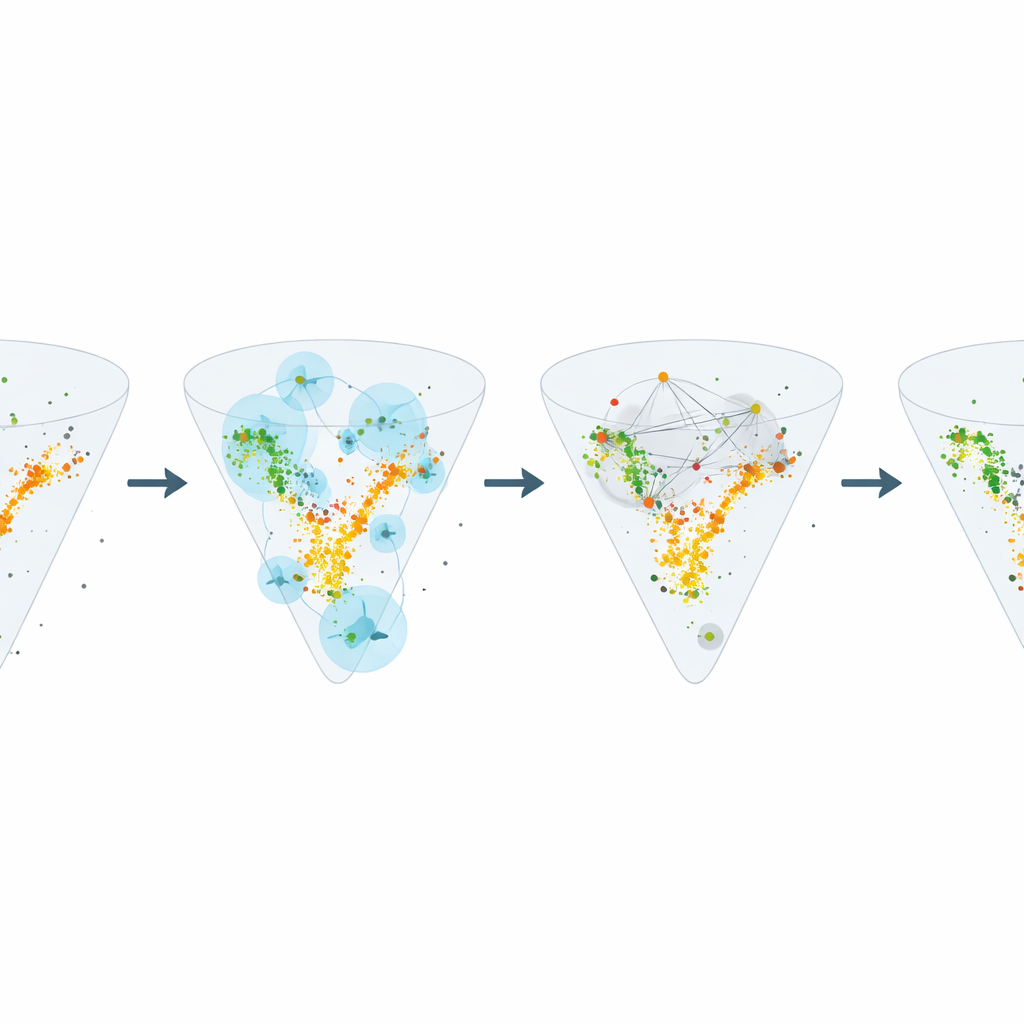
Les auteurs proposent la suppression d’anomalies spatialement divisée (SDOR), une méthode qui s’attaque à l’encombrement en divisant d’abord le champ de vision du LiDAR en nombreuses petites régions, ou secteurs, à la fois horizontalement et verticalement. Plutôt que de traiter la scène entière comme un grand nuage uniforme, SDOR considère chaque secteur comme une mini-scène indépendante. Dans chaque secteur, l’algorithme évalue combien de points sont présents et à quel point ils sont dispersés. Cette division apporte deux bénéfices clés : chaque secteur peut être traité en parallèle sur des processeurs multi-cœurs, et la méthode peut adapter son comportement aux conditions locales de cette zone, par exemple si elle est proche du véhicule, éloignée, dense en points ou relativement claire.
Laisser les données décider de ce qui compte comme bruit
Une fois la scène découpée, SDOR estime l’occupation de chaque secteur par rapport au nuage global. Elle ajuste ensuite un rayon de recherche — le voisinage autour de chaque point examiné — pour tenir compte à la fois de la distance au capteur et de la densité locale. Les points proches du véhicule ou dans des régions très denses reçoivent des voisinages plus petits ; les régions éloignées ou clairsemées en reçoivent des plus grands. Pour chaque point, l’algorithme compte combien de voisins se trouvent dans ce rayon. S’il y en a trop peu, le point est considéré comme un outlier — probablement un flocon, une goutte de pluie ou une réflexion de brouillard — et est supprimé. Cette stratégie sensible à la densité évite d’appliquer une règle unique partout et laisse les données déterminer quels points sont fiables et lesquels doivent être écartés.
Performances rapides et stables à travers de nombreuses scènes orageuses
Les chercheurs ont testé SDOR sur deux jeux de données exigeants : l’un collecté en conditions hivernales réelles avec des points de neige étiquetés, et l’autre simulant neige, pluie et brouillard sur des scènes urbaines. Ils ont comparé SDOR à huit méthodes existantes, incluant des filtres classiques basés sur la distance, des filtres basés sur l’intensité des retours et des variantes dynamiques plus complexes. SDOR a systématiquement obtenu de bons scores pour identifier correctement le bruit météorologique tout en préservant les objets réels, et ce avec certains des taux d’erreur les plus bas. Surtout, grâce à sa conception par secteurs et son traitement parallèle, SDOR a traité les trames plus rapidement que d’autres méthodes basées sur la distance et a même rivalisé avec, voire surpassé, de nombreuses approches basées sur l’intensité en termes de vitesse, tout en restant plus précise et plus stable d’une trame à l’autre.
Une vision 3D plus claire pour une conduite autonome plus sûre
En termes simples, SDOR apprend à une voiture autonome à ignorer le « bruit » visuel causé par le mauvais temps sans perdre de vue les éléments importants — autres véhicules, piétons et la route elle-même. En découpant la scène en morceaux et en adaptant ses règles aux conditions locales de chaque morceau, la méthode fournit des vues 3D propres et fiables suffisamment rapidement pour la conduite en temps réel. Cela fait de SDOR un composant prometteur pour des véhicules autonomes plus sûrs capables de maintenir une perception fiable même lorsque la météo est loin d’être idéale.
Citation: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
Mots-clés: Débruitage LiDAR, conduite autonome, météo défavorable, filtrage de nuage de points, perception capteur