Clear Sky Science · pt
Remoção espacialmente dividida de outliers para desruído de LiDAR em condições climáticas adversas
Enxergando claramente através da chuva e da neve
Carros autônomos dependem de sensores a laser, chamados LiDAR, para construir uma imagem 3D do mundo. Mas quando o tempo piora — neve, chuva ou neblina — esses sensores captam inúmeras reflexões de gotas e flocos, poluindo a visão com pontos falsos. Este estudo apresenta uma nova forma de limpar rapidamente e com precisão essas varreduras LiDAR confusas, ajudando veículos autônomos a “ver” a estrada e os obstáculos reais mesmo em condições severas.
Por que o mau tempo cega os olhos a laser
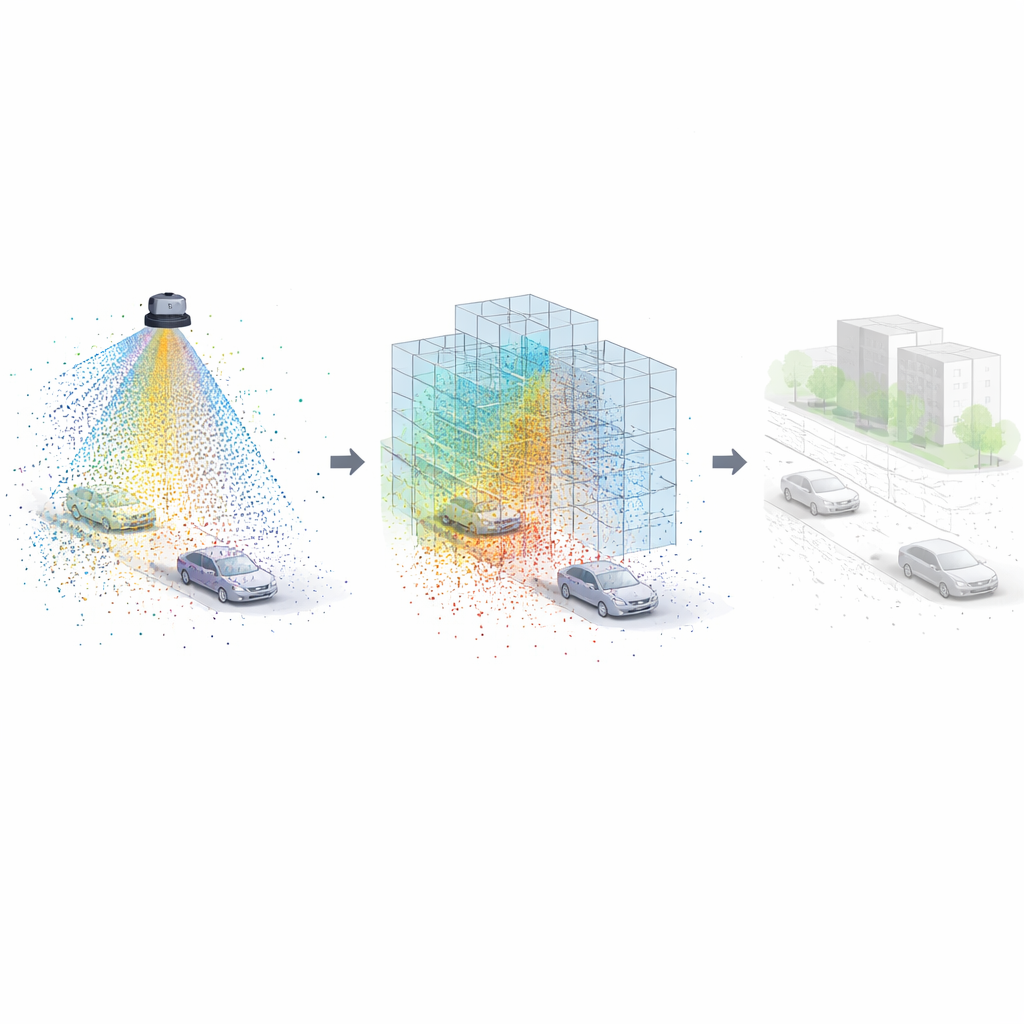
O LiDAR funciona emitindo pulsos a laser e medindo as reflexões para criar uma nuvem de milhões de pontos 3D. Em tempo claro, a maioria desses pontos vem de objetos reais como carros, edifícios e superfícies de estrada. Em neve ou chuva forte, no entanto, muitos pontos são causados por minúsculas partículas suspensas no ar. Métodos de limpeza tradicionais analisam quão distantes os pontos estão entre si ou quão fortemente refletem a luz. Embora essas abordagens possam remover parte do ruído, elas frequentemente têm dificuldade em acompanhar em tempo real e acabam apagando pontos reais demais ou deixando pontos falsos demais, especialmente quando o padrão de pontos muda com a distância e o ângulo de visão.
Dividindo a cena em partes manejáveis
Os autores propõem a Remoção Espacialmente Dividida de Outliers (SDOR), um método que combate a confusão dividindo primeiro o campo de visão do LiDAR em várias pequenas regiões, ou setores, tanto na horizontal quanto na vertical. Em vez de tratar toda a cena como uma única nuvem uniforme, o SDOR trata cada setor como uma mini-scena independente. Dentro de cada setor, o algoritmo analisa quantos pontos estão presentes e quão distribuídos eles estão. Essa divisão libera dois benefícios principais: cada setor pode ser processado em paralelo em processadores multicore, e o método pode adaptar seu comportamento às condições locais dessa região, como se está perto do veículo, distante, densa em pontos ou relativamente esparsa.
Deixar os dados decidirem o que é ruído
Uma vez dividida a cena, o SDOR estima quão lotado cada setor está em comparação com a nuvem geral. Em seguida, ajusta um raio de busca — a vizinhança ao redor de cada ponto que é inspecionada — para corresponder tanto à distância do sensor quanto à densidade local. Pontos próximos ao veículo ou em regiões densamente povoadas recebem vizinhanças menores; regiões distantes ou esparsas recebem vizinhanças maiores. Para cada ponto, o algoritmo conta quantos vizinhos caem dentro desse raio. Se houver muito poucos, esse ponto é tratado como um outlier — provavelmente um floco de neve, gota de chuva ou reflexão de névoa — e removido. Essa estratégia sensível à densidade evita o uso de uma regra fixa em toda parte e, em vez disso, deixa os dados determinarem quais pontos são confiáveis e quais devem ser descartados.
Desempenho rápido e estável em muitas cenas tempestuosas
Os pesquisadores testaram o SDOR em dois conjuntos de dados exigentes: um coletado em condições reais de inverno com pontos de neve rotulados, e outro que simula neve, chuva e neblina em cenas de direção urbana. Eles compararam o SDOR com oito métodos existentes, incluindo filtros clássicos baseados em distância, filtros baseados em intensidade que dependem do brilho dos retornos, e variantes dinâmicas mais complexas. O SDOR obteve consistentemente altas pontuações na identificação correta do ruído meteorológico, preservando os objetos reais, e fez isso com algumas das menores taxas de erro. Crucialmente, graças ao seu desenho setor-por-setor e paralelo, o SDOR processou quadros mais rápido do que outros métodos baseados em distância e até rivalizou ou superou muitas abordagens baseadas em intensidade em velocidade, mantendo-se mais preciso e mais estável de um quadro para outro.
Visão 3D mais nítida para direção autônoma mais segura
Em termos práticos, o SDOR ensina um carro autônomo a ignorar o “ruído” visual causado pelo mau tempo sem perder de vista as coisas importantes — outros veículos, pedestres e a própria estrada. Ao cortar a cena em pedaços e ajustar suas regras às condições locais de cada pedaço, o método entrega visões 3D limpas e confiáveis, rápidas o bastante para a condução em tempo real. Isso faz do SDOR um componente promissor para veículos autônomos mais seguros, capazes de manter percepção confiável mesmo quando o clima está longe do ideal.
Citação: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
Palavras-chave: desruído de LiDAR, direção autônoma, clima adverso, filtragem de nuvem de pontos, percepção do sensor