Clear Sky Science · it
Rimozione spazialmente divisa degli outlier per la de-noise del LiDAR in condizioni meteorologiche avverse
Vedere chiaramente attraverso pioggia e neve
Le auto a guida autonoma si affidano a sensori a base laser, chiamati LiDAR, per costruire un quadro 3D dell’ambiente. Ma quando il tempo peggiora—neve, pioggia o nebbia—questi sensori catturano innumerevoli riflessioni da gocce e fiocchi, intasando la visione con punti falsi. Questo studio presenta un nuovo metodo per ripulire rapidamente e con precisione queste scansioni LiDAR rumorose, aiutando i veicoli autonomi a “vedere” la strada e gli ostacoli reali anche in condizioni difficili.
Perché il maltempo acceca gli occhi laser
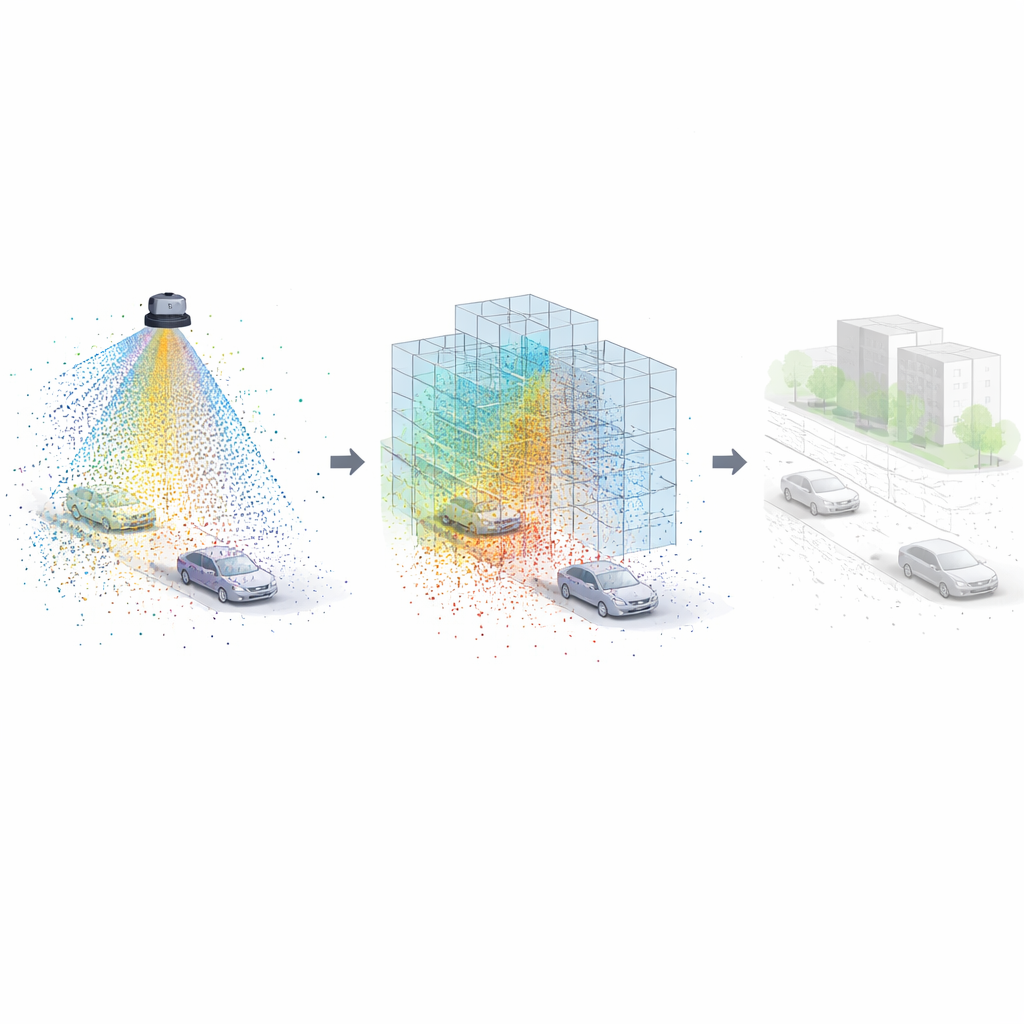
Il LiDAR funziona inviando impulsi laser e misurandone i ritorni per creare una nuvola di milioni di punti 3D. In condizioni limpide, la maggior parte di questi punti proviene da oggetti reali come auto, edifici e superfici stradali. In neve o pioggia intensa, invece, molti punti sono causati da piccole particelle sospese nell’aria. I metodi tradizionali di pulizia guardano a quanto sono distanti i punti tra loro o a quanto fortemente riflettono la luce. Pur potendo rimuovere parte del rumore, questi approcci spesso faticano a mantenere il passo in tempo reale e tendono o a cancellare troppi punti reali o a lasciare troppi punti falsi, specialmente quando il pattern dei punti varia con la distanza e l’angolo di osservazione.
Dividere la vista in porzioni gestibili
Gli autori propongono la Rimozione Spazialmente Divisa degli Outlier (SDOR), un metodo che affronta il disordine dividendo prima il campo visivo del LiDAR in molte piccole regioni, o settori, sia orizzontalmente che verticalmente. Invece di trattare l’intera scena come un’unica grande nuvola uniforme, SDOR considera ogni settore come una mini-scena indipendente. All’interno di ciascun settore, l’algoritmo valuta quanti punti sono presenti e quanto sono distribuiti. Questa suddivisione offre due vantaggi chiave: ogni settore può essere processato in parallelo su processori multicore, e il metodo può adattare il proprio comportamento alle condizioni locali di quella regione, ad esempio se è vicina al veicolo, distante, densa di punti o relativamente scarsa.
Lasciare che siano i dati a decidere cosa è rumore
Una volta divisa la scena, SDOR stima quanto è affollato ciascun settore rispetto alla nuvola complessiva. Regola quindi un raggio di ricerca—il vicinato attorno a ogni punto che viene ispezionato—in modo che corrisponda sia alla distanza dal sensore sia alla densità locale. I punti vicini al veicolo o in regioni densamente popolate hanno vicinati più piccoli; le regioni lontane o sparse ne hanno di più ampi. Per ogni punto, l’algoritmo conta quanti vicini ricadono entro questo raggio. Se sono troppo pochi, quel punto viene considerato un outlier—probabilmente un fiocco di neve, una goccia di pioggia o un riflesso di nebbia—e rimosso. Questa strategia sensibile alla densità evita di usare una regola unica per tutti e lascia invece che siano i dati a modellare quali punti sono affidabili e quali vengono scartati.
Prestazioni rapide e stabili in molte scene tempestose
I ricercatori hanno testato SDOR su due dataset impegnativi: uno raccolto in reali condizioni invernali con punti di neve etichettati, e un altro che simula neve, pioggia e nebbia su scene di guida urbana. Hanno confrontato SDOR con otto metodi esistenti, inclusi filtri classici basati sulla distanza, filtri basati sull’intensità che si affidano alla brillantezza dei ritorni, e varianti dinamiche più complesse. SDOR ha ottenuto costantemente punteggi elevati nell’identificare correttamente il rumore meteorologico preservando gli oggetti reali, mostrando alcuni dei tassi di errore più bassi. Fondamentale, grazie al suo design per settori e parallelo, SDOR ha processato i frame più rapidamente rispetto ad altri metodi basati sulla distanza e ha persino eguagliato o superato molte soluzioni basate sull’intensità in termini di velocità, mantenendo contemporaneamente maggiore accuratezza e stabilità tra fotogrammi.
Visione 3D più nitida per una guida autonoma più sicura
In termini pratici, SDOR insegna a un’auto a guida autonoma a ignorare il «rumore» visivo causato dal maltempo senza perdere di vista le cose importanti—altri veicoli, pedoni e la strada stessa. Tagliando la scena in porzioni e adattando le regole alle condizioni locali di ciascuna porzione, il metodo fornisce viste 3D pulite e affidabili abbastanza rapidamente per la guida in tempo reale. Questo rende SDOR un elemento promettente per veicoli autonomi più sicuri, in grado di mantenere una percezione affidabile anche quando il tempo è tutt’altro che perfetto.
Citazione: Shin, S., Joo, J., Lee, H. et al. Spatially divided outlier removal for LiDAR de-noising in adverse weather conditions. Sci Rep 16, 11480 (2026). https://doi.org/10.1038/s41598-026-38674-6
Parole chiave: de-noise LiDAR, guida autonoma, condizioni meteorologiche avverse, filtraggio delle nuvole di punti, percezione del sensore